 360度全景智能監控方案解析
360度全景智能監控方案解析
目前,國內外尚未將三維成像技術成熟應用到監控產品上面,功能比較接近的產品是車輛智能全景監控系統。但它只能記錄平面信息,不能全面地反映周圍環境的具體情況。
今天為大家介紹的360度全景智能監控方案,正是在車輛智能全景監控系統發展而來的,是對車輛智能全景監控系統的改進。
通過采用三維成像技術和語聲混合算法,本系統一方面將周圍物體的三維建模和尺度測量用3D技術來實現。另一方面,還將全部觀測點的聲音信息全部記錄下來,使得記錄的資料更加生動、形象和全面。
本系統方案可以廣泛地應用于中高檔汽車、工程機械、港口船閘、水庫大壩、金融場所等重要場合的全方位智能化監控。
系統基本原理描述
三維智能全景監控系統主要分為如下幾部分:中央處理單元、顯示與人機界面、專用攝像頭(分布式安裝)。
本系統的主體為中央處理單元,該部分主要包括:
(1)視頻采集部件,采集系統所需視頻,并將采集到的視頻傳送到視頻合成部件。
(2)視頻防抖部件,最大程度地預防在視頻采集過程中的抖動,同時進行相應的視頻補償操作。
(3)視頻合成部件,將采集到到視頻內容進行無縫合成,形成全景視頻,并輸送到投影與映射單元。
(4)投影與映射部件,將合成的視頻內容進行投影與映射,輸出到相應的終端。
(5)目標檢測部件,對周邊的目標物體進行智能檢測,按照預先設定的規則進行智能控制操作、綜合障礙預警和多元導航信息等。
(6)GIS部件,對移動主體進行GIS定位功能。
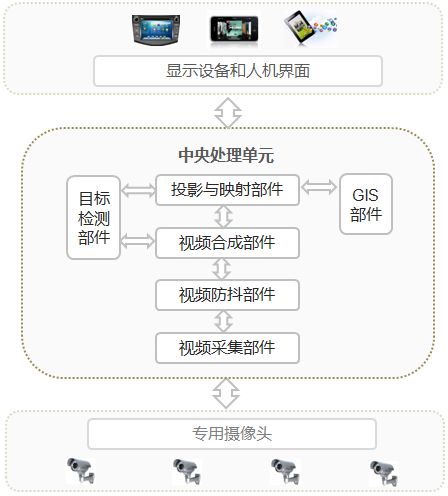
圖1 系統方案框架圖
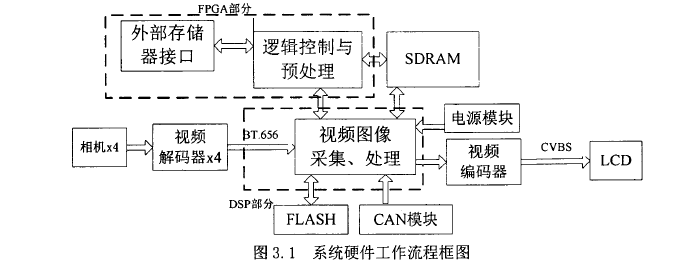
系統硬件的工作流程框圖
系統方案主要包括:DSP核心處理器單元、FPGA協同處理器單元、圖像采集單元(相機)、視頻解碼芯片、視頻編碼芯片、CAN模塊。圖3.1系統硬件的工作流程框圖。
系統硬件平臺主要器件的選型及討論分析
本系統硬件平臺器件選擇是依據系統穩定性、可擴展性以及日后軟件升級空間等各項性能指標最佳化的情況下進行分析的。各器件還以盡可能降低系統成本,充分利用各芯片的內部資源為準則進行選取,提高整個系統的集成度和性價比。
(1)TMS320C6000系列DSP分析
在本設計中DSP作為核心處理器件,它的選型決定外圍電路的復雜性和整個系統的穩定性。為實現多圖像傳感器融合的全景泊車輔助系統的特殊要求,核心處理器DSP的選型決定了整個系統電路的結構。
DM642保留了C64x原有的內核結構以及大部分外設的基礎上為適應多路視頻采集處理等應用增加了3個雙通道數字視頻無縫接口,可最多同時采集6路數字視頻流。其片內資源豐富和擴展性好,最為適合本設計的要求,經過綜合考慮,最終選擇DM642作為本設計的核心處理器。
選用DM642作為本設計核心處理器, DM642整體功能框圖如圖3.2所示。
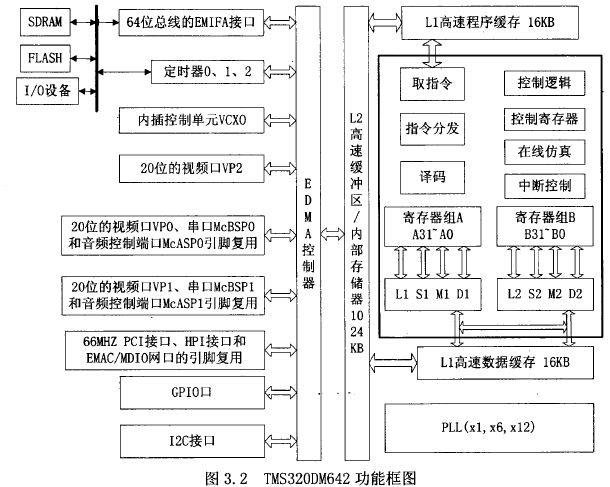
DM642內部使用L1P和L1D兩級高速緩存結構,有著強大豐富的外圍設備接口。L1P和L1D分別為一級程序緩存、二級數據緩存,LIP是一個的直接映射緩存空間,L1D是一個2組相連的高速數據緩存空間n 2|。
外圍設備包括:3個可配置視頻端口,1個以太網控制器模塊,1個高速數據輸入/輸出管理模塊,1個內插VCXO控制接口,1個多鏈路專用音頻接口,1個12C總線硬件標準接口,2個可配置多通道緩沖串口,3個可配置32位定時器,1個與外圍設備的擴展接口(PCI),1組16管腳的可配置I/O端口(GPIO),1個64位IMIFA,可以無縫連接同/異步存儲器和外圍擴展設備。
(2)FPGA的選型及分析
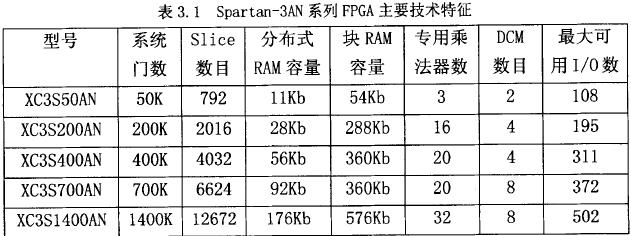
經過調研最終本設計選用的是擁有40萬系統門數的Spartan一3AN系列XC3S400AN型號的芯片,所以著重介紹此款芯片的資源外設等相關信息n6。
Spartan一3AN系列芯片為系統集成度非常高的非易失性FPGA,此款芯片有以下幾項獨特性能:FPGA有大量內部SRAM高性能資源、非易失性、縮小板卡空間和配置便捷等特點。
Spartan一3AN.硬件平臺是專門面向對成本有嚴格要求的嵌入式產品開發的。
Spartan-3AN系列FPGA芯片的硬件資源如表3.1。
(3)圖像傳感器的選型及分析
圖像傳感器包括電子束攝像管、CCD、CMOS等超大規模半導體集成感光器件的圖像傳感器和面陣高速掃描型圖像傳感器等。CMOS圖像傳感器的內部結構框圖如圖3.3所示。
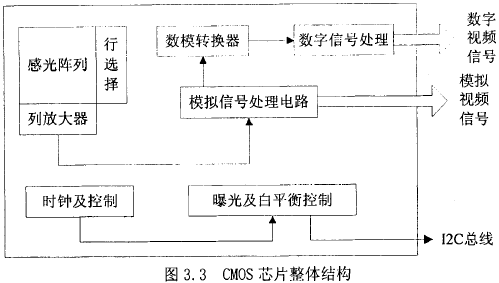
在CMOS器件發展的歷程中,CMOS器件從“被動像敏單元”結構到“主動像敏單元”演變是由于大規模集成電路設計與微電子制造技術進入深亞微米階段,CMOS圖像傳感器芯片可集成大規模感光陣列、信號讀出及處理電路和控制電路于一體,再加上光學鏡頭等外圍設備就構成了一個光學成像系統。
現代工藝條件下的CMOS芯片內部結構主要是由感光陣列、水平(垂直)控制電路和時序電路、信號讀出與處理電路、模/數轉換電路和數據接口電路等組成。
下面對兩種圖像傳感器進行分析,即MT9V024和0v7960兩款不同公司的圖像傳感器芯片。
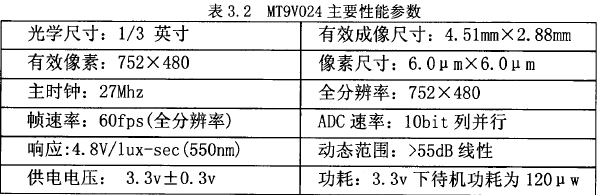
(1)MT9V024圖像傳感器
MT9V024是像平面尺寸為1/3英寸、寬VGA模式的CMOS有源像素圖像傳感器,它采用TrueSNAP球形快門和高動態范圍。該傳感器專門為內外兼顧的汽車成像需求而設計,這使得它成為多種成像應用環境的理想芯片。
這款傳感器采用Aptina的突破性低噪聲的CMOS成像技術以達到CCD的成像質量(基于信號信噪比和低光照靈敏度)同時保持了固有的大小,成本和CMOS的整合優勢。
片上采用先進的相機功能,如分級2×2,4×4,以提高在較小的決議上操作時的靈敏度,就像窗口功能,行和列鏡像。通過標準兩線串行可編程接口,可以在默認模式下對幀大小、曝光度、增益以及其他參數進行配置。默認模式輸出寬VGA尺寸的圖像,每秒60幀。
片上模數轉換器把每個像素的模擬信號轉換為士Obit數據流。可另外啟用一個12位全分辨率代替10位小信號。除了傳統的并行邏輯輸出,MT9V024還有還具有LVDS(串行低壓差分信號)這款傳感器能夠在立體攝像中操作。MT9V024圖像傳感器具體性能參數如表3.2所示:
(2)0V7960圖像傳感器
0V7960是OMNIVISION最近兩年新推出的小尺寸圖像傳感器芯片,它的出現滿足了汽車業對輔助駕駛系統應用要求(如倒車后視鏡),開創了CMOS圖像傳感器在汽車安全輔助駕駛系統應用的新開端0V7960圖像傳感器的性能完全滿足了汽車電子行業對圖像傳感器成像效果的特殊需求,1/4超小巧體積,在低光照下的也有良好的性能(<0.01LUX),并采用全球最小的CSP封裝,體積比同類產品小50%,已經成為CMOS產品的領導者。
0V7960圖像傳感器具體性能參數如表3.3所示:
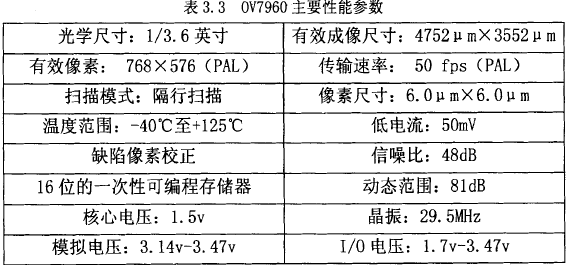
本設計的目的是開發出一種能打破現有的只在高端車上配備的全景泊車輔助系統。所以低成本是系統開發必須考慮的因素之一,由于用于汽車主動安全的系統是給駕駛員提供二些車輛周圍實時狀況信息,所以系統對圖像質量的要求不是特別高,經過綜合考慮本設計才用0V7960圖像傳感器作為相機的圖像采集芯片。
電源電路設計
由于本系統包含DSP、FPGA以及它們的外圍電路器件,所需電源有5v、3.3v、2.5v、1.8v、1.4v、1.2v等,系統所需電源如此之多電源模塊的設計會成為整個系統的難點,能否保證系統個部分能夠穩定運行成為整個硬件設計成敗關鍵,下面將各模塊器件的電源進行總體說明。
1、DSP及外圍設備電源電路
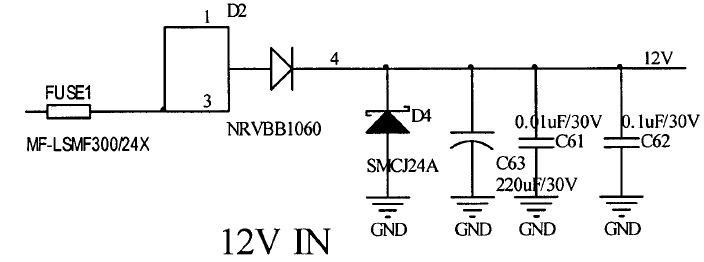
汽車啟動和正常行駛過程中時,其電源輸出電壓在lOV一16V范圍內無規律突變。不難想象出這樣的大幅度波動電壓對電子系統的危害,若直接作用在車載電子系統及車載儀表上,這種大幅度波動產生的電壓沖擊往往會造成電子器件損壞,導致出現嚴重事故。
所以本系統在設計中考慮到12V供電電源要從車上引入時,添加一個保護電路確保整個系統電路的安全,如圖3.4:
圖3.4 12V保護電路
為確保TMS320DM642處理器穩定工作必須對它的內核和I/O端口分別進行獨立供電以減少電源之間的相互串擾,其內核電壓為1.4V,I/O端口電源為3.3V。視頻編碼芯片TVP5150AMl數字電壓(AVDD)和模擬電壓(DVDD)輸入均為1.8 V,i/o端IZl電壓(DVDDIO)為3.3 V。
視頻編碼芯片SAATl21數字電壓(VDDD)和模擬電壓(VDDA)同為3.3V。GDRAM和FLASH工作電壓為3.3V。考慮整個系統的功耗,第一級的電壓轉換全部選用TI推薦的開關電源管理芯片TPS5430作為12V一5V的電壓轉換核心器件;選用兩片TPS54310參照其DataSheet對電路進行設計,分別為DSP提供內核電壓1.4V和I/O端口電壓3.3V,其中3.3V電源也為系統中其他元器件供電。各部分電路設計如下所示:
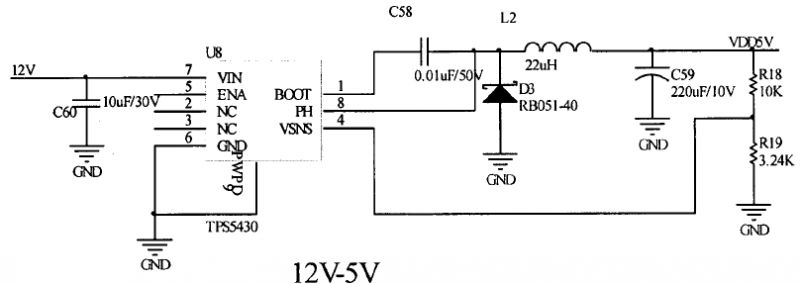
圖3.5 TPS5430電源轉換電路12V-5V
TPS54310輸入的電壓為TPS5430經過轉換輸出的5V電壓。一片TPS54310為
TMS320DM642提供內核電壓,輸出電壓1.4V如電路圖3.9所示,另一片為TMS320DM642提供I/O端口電壓,輸出電壓為3.3V如圖3.6所示:
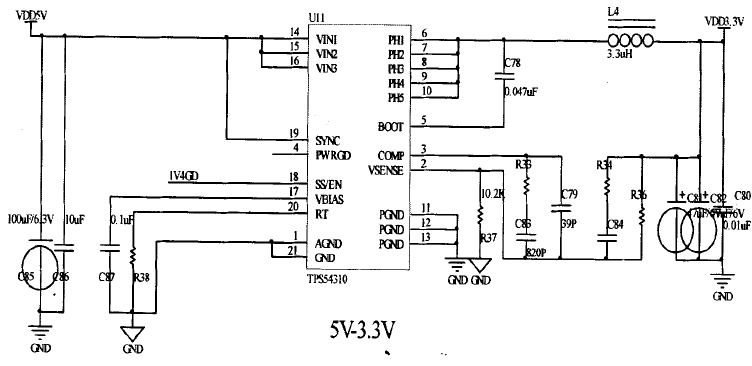
圖3.6 DM642外圍I/0端口電壓
在系統上電后,DSP內核首先得到TPS54310電源芯片提供的1.4V穩定電壓,然后第一片TPS54310的PV/RGD端口輸出一個使能電平(高電平)給第二片TPS54310的SS/EN端口舊引。這樣就保證了系統上電時DSP內核首先獲得供電,IlO端口在內核得到1.4V穩定電壓后獲得3.3V供電,系統掉電過程中DSP內核后于i/o端口電源掉電。這樣大大增加了芯片使用壽命和系統穩定性。
2、FPGA及其他部分電源模塊設計
FPGA協處理器選用的是Xilinx的Spartan-3AN系列芯片,其型號為XC3S400AN。XC3S400AN處理器內核電壓(VCCINT)為1.2V,輔助電源電壓(VCCAUX)為2.5V,i/o端口電壓為3.3V雎引。
板卡上其他芯片,如FPGA的配置芯片XCF02SV020C電源為2.5V和3.3V,TVP5150AMl電壓(AVDD、DVDD)為1.8V以及I/0端口電壓(DVDDIO)3.3V,SAA7121電壓為3.3V。
由于電源輸入12V經過TPS54310和TPS5430等開關電源第一級轉換,所以之后的電壓轉換芯片都選用的是設計簡單、占用空間小的線性電源轉換芯片,如TLVlll7—1.2為FPGA內核提供1.2V穩定電壓、TLVlll7-1.8為TVP5150AMl提供1.8v數字電壓、TLVll7—2.5為FPGA的輔助電源和配置芯片電源。其電路設計如下圖3.7所示
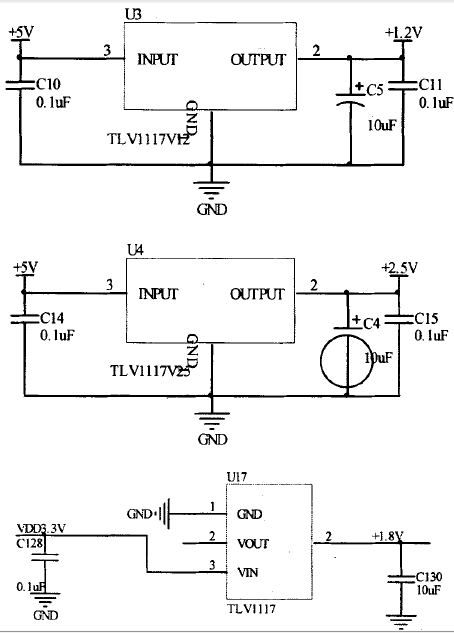
圖3.7 FPGA及其他部分電源模塊
基于0V7960圖像傳感器的相機設計
下面對0V7960圖像傳感器核心部分電路設計進行簡單介紹。相機是否能正確輸出穩定模擬信號,是相機部分設計的關鍵,必須采用輸出電壓紋波系數小的電源芯片和大量的濾波電容,濾波電容的擺放盡量靠近引腳,這樣就能夠輸出良好的模擬視頻圖像數據。圖像傳感器設計電路如圖3.8所示:
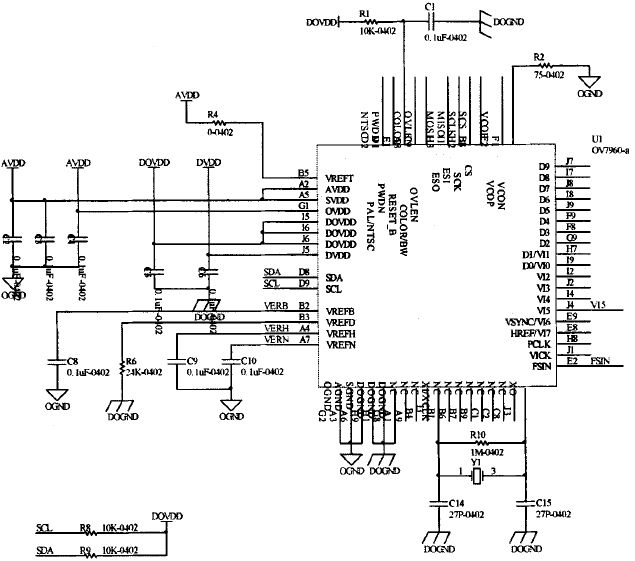
圖3.8 0V70960圖像傳感器外圍電路
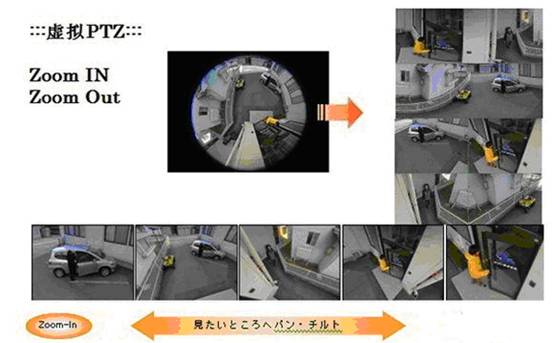
三維智能全景監控系統實踐應用
針對本系統在車輛的三維全景監控系統上進行了實踐和應用。通過本系統進行視頻合成虛擬出來的監控范圍內有效區域的全景視圖效果,并利用三維圖像的形式進行顯示,提供更加真實的虛擬現場。同時,本系統還可以實現關鍵部位的自動尺度測量,在必要的時候,主動進行報警。其效果演示圖如下:
圖3 三維智能全景監控系統在車輛監控上的應用效果圖
-
圖像傳感器
+關注
關注
68文章
1886瀏覽量
129464 -
智能監控
+關注
關注
5文章
236瀏覽量
31732 -
3D技術
+關注
關注
1文章
91瀏覽量
24570
原文標題:一文教你搞定360度全景智能監控
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
360°全景可視泊車/行車記錄(四路全景+行車記錄儀+熄火震)
【MiCOKit申請】360度全景泊車系統
AVM全車監視系統 360度全景泊車系統
什么是家用視頻監控系統?合肥卓居智能家居告訴你
行車視野有盲區怎么辦?360度全景行車記錄儀清盲區無死角
基于RK3588芯片打造360度8K全景攝像機的產品解決方案
ImmerVision開發出全球最小的360度全景鏡頭
360度全景相機解決方案_VR全景圖像捕獲傳輸播放解決方案出爐
世界首款360度全景VR相機PILOT Era介紹
海康威視鷹眼設備可提供高清全景360度自動跟蹤功能
基于TDA處理器的360度全景實現YUV422輸出的方案






 工商網監
工商網監
評論