 汽車智能駕駛艙的發展方向是什么?智能駕駛艙的詳細概述
汽車智能駕駛艙的發展方向是什么?智能駕駛艙的詳細概述
2018年6月21-22日,由布谷鳥科技、佐智汽車主辦,艾拉比智能、ADI亞德諾半導體、索喜科技贊助支持的“2018第二屆智能座艙與智能駕駛峰會”在深圳福田區綠景錦江酒店舉辦。路暢科技副總裁/CTO胡錦敏博士在會上做了《融合,汽車智能駕駛艙的發展方向》的主題演講。
路暢科技副總裁/CTO 胡錦敏博士
各位朋友,大家上午好!本次我主要分享智能駕駛艙發展趨勢。
智能駕駛艙Cockpit的這個詞,我Google了一下,發現關于飛機的信息比較多。當你Google “Smart Cockpit”,你會發現很多關于飛機的飛行手冊,描寫飛機駕駛艙的結構和操作的。我在一篇描述飛機智能駕駛艙的學術文章中,找到了智能駕駛艙的概念架構,這個駕駛艙系統分為環境監視、駕駛員狀態監視、飛機狀態監視、人機交互系統、決策執行系統五大模塊。從結構來說,駕駛艙有屏幕、按鈕、開關、操縱桿、方向舵,及其他。如果說智能駕駛艙就是中控大屏和儀表,是非常片面的。真正的駕駛艙還包括監視模塊(監視飛機、監視飛行員、監視環境等)和決策執行系統。
與自動駕駛汽車分5個等級一樣,飛機駕駛智能等級分為10個等級。
1級:飛機沒有智能,全由人來負責決策和操作;
2級:計算機提供一個決策和執行全集由駕駛員自己選擇;
3級:縮小決策和執行選項范圍;
…………
10級:計算機自動決策執行,完全忽略人的介入。
智能化目的是減少人的介入。現在,汽車發展正在發生變革-即智能化、網聯化、電動化、共享化。其中智能駕駛艙與智能化、網聯化相關,同時也和出行相關,如儀表車機上顯示和共享出行相關的監控信息。
我重點說駕駛艙與智能化相關部分。
自動駕駛汽車分5個等級,L1是FEET OFF,腳可以釋放出來,就是具備自動緊急剎車功能;L2是HANDS OFF,方向盤由系統掌控;L3是EYES OFF,可以視線移開。所以說,在L3階段前,智能駕駛艙的屏幕很重要,其可以顯示車輛后面和環境周邊信息;L4時屏幕重要性降低,車輛會提醒駕駛員何時介入接管;L5時,不需要人類接管了。
過去,就車輛看,主要關注是環境和車輛本身。現在,我們慢慢關注駕駛員、人機交互這些領域了。比如,監測駕駛員,包括疲勞監測(操作行為和習慣);比如人機交互(人機交互在達到L3級自動駕駛之前,是必須的而且非常有價值的)。
汽車智能駕駛艙概念架構有駕駛員監測、環境監測、汽車狀態監測、人機交互系統和決策執行系統。其中,環境監測,包括毫米波雷達、激光雷達、攝像頭等;汽車狀態監測,包括鑰匙系統,CAN等;駕駛員監測包含疲勞監視,以后可能會有健康監視等。人機交互部分,包括HUD、車機、儀表,還有基于輸入的交互方式,手勢、語音、人像識別、身份識別等。無人駕駛,主要是決策執行系統,獲得信息,做出決策,如何讓它更加智能。
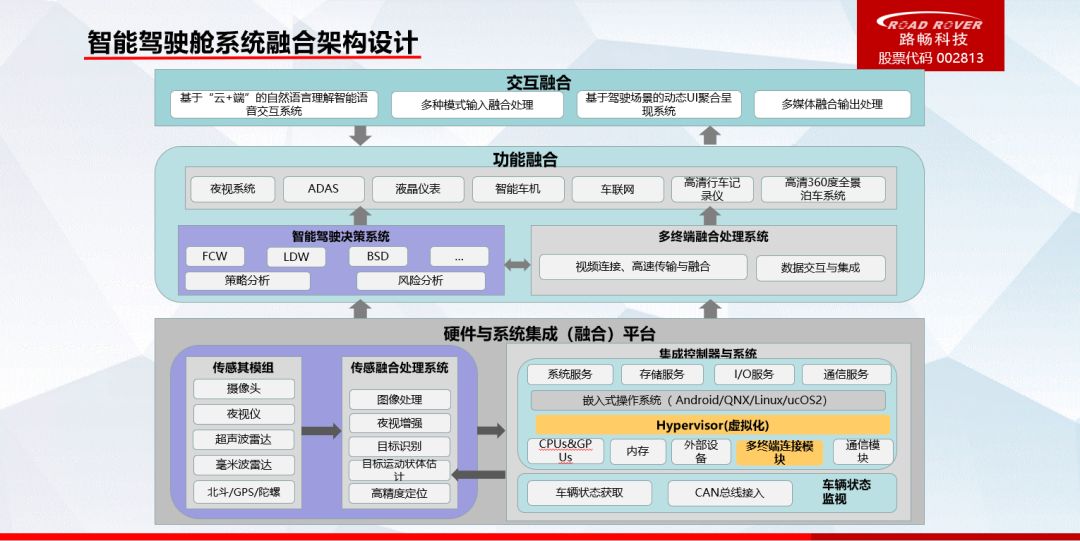
未來,智能駕駛艙發展的趨勢就是走向融合,也就是這篇講稿的主題。路暢的智能駕駛艙產品在逐步會融合ADAS展示、導航展示、攝像頭盲區展示等功能。而這些功能的融合,需要重新設計UI布局,因為信息的展示是動態的,需要基于場景來觸發。集成控制器會把相關功能融合在一起,這種融合不僅是SOC融合,是一個或多個功能的融合。
首先,來說下智能駕駛艙的融合架構設計。智能駕駛艙的融合架構設計有硬件與系統集成融合,有功能融合,有交互融合等。
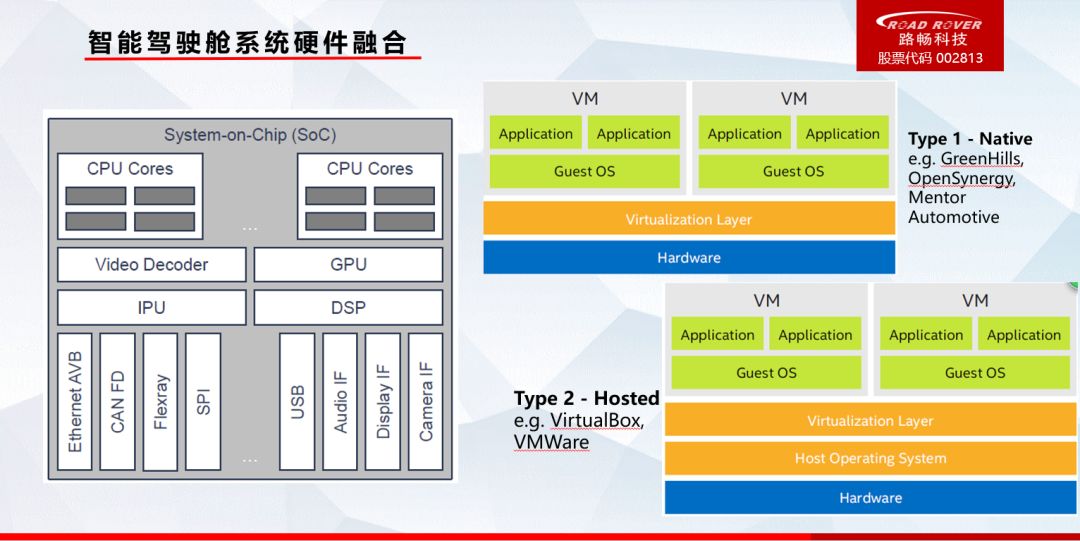
首先說下硬件融合。過去是把CPU、GPU融合,現在是CPU、GPU,甚至DSP、MCU進行融合,使得SOC功能更為強大。SOC的功能變得越來越強大,這是芯片發展趨勢。
另外就是虛擬化,虛擬化有兩種技術。
Type 1:嵌入式用Type 1方式比較多。Type 1依賴于硬件,因為嵌入式操作系統的底層會把這些和硬件的通訊重新包裝。
Type2:云計算或者PC上應用Type 2比較多。舉個例子,我們在PC上裝VMWare再裝Linux就是Type 2,是裝Windows之后,在Windows上再安裝虛擬機等。
我們關注虛擬機兩個點,一是可靠性,二是信息或數據交互。比如,車機中有一個圖片在儀表上顯示,如果用hypervisor,就能夠瞬間實現,同步速度快,通過內存共享,或虛擬總線、虛擬以太網等。如果用其分離的硬件,兩個獨立系統需要連接,比如用LVDS線,效果可能沒有虛擬化這么好。
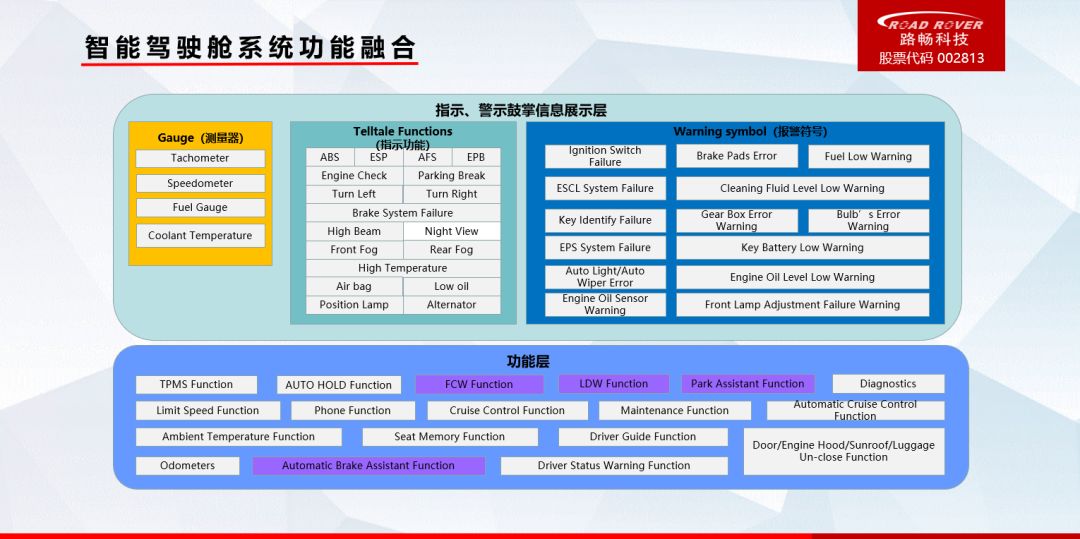
其次是功能融合。智能駕駛艙內可開發功能會越來越豐富,不僅傳統功能會保留,未來還可能加入輔助駕駛相關,以及網絡高清地圖、高精度定位、增強定位等信息。
功能層融合以后,再把這些東西展示出來。比如特斯拉輔助駕駛,需要在儀表上展示輔助駕駛、碰撞等功能信息。開發的功能越多,配置越豐富,就越需要將它們整合起來。
第三是信息融合。信息融合,包括與充電信息融合、與車身狀態信息融合、與環境融合、與互聯網融合以及自身功能信息交互融合。信息融合是功能融合以及交互融合的關鍵,只有當所有信息進入到駕駛艙的集成控制器里面才能實現更多地功能。
對電動車來說,不僅需要展示電池管理、能量流等終端信息,還要包含車身狀態等動態信息。
環境信息融合,就是將各種傳感器(雷達、攝像頭)監測到周邊環境信息展示出來。比如自動泊車,首先通過12個超聲波雷達能掃描出一個空間,發現有3個車位同時空著,這時決策系統把環境信息做分析處理,選擇自動泊到哪個車位。
與互聯網融合,包括T-BOX及云平臺、娛樂多媒體信息融合、實時路況信息以及汽車分享信息等。
第四是交互融合。下面這個圖中,IC是原來儀表,IVI是原來中控車機。原來中控車機顯示導航,現在融合到儀表上進行顯示,或者把更多信息融合起來。交互融合就是從不同的場景,不同的駕駛模式上疊加出不同的UI或者UX。
比如,當你開車的時候發現要碰撞到前面的車了,這時情況是自身車速快+前面車急剎車+自身車右轉改道+右邊有盲區。同時,汽車傳感器的工作是毫米波雷達和攝像頭監測車輛周圍情況,中控儀表通過視頻顯示車后面狀況,導航顯示轉向信息,這些信息如何顯示,這就是交互融合層次需要處理的。
第五是結構外觀融合。這個融合我們很少關注,儀表、車機,如何做到一體化,參考Faurcia的介紹,其未來發展趨勢是Smart Surface——智能表面。從概念結構來看,智能駕駛艙會變得越來越智能,因為融入的信息和功能越來越多。
硬件融合、功能融合、信息融合、交互融合、結構外觀融合,這就是我理解的汽車智能駕駛艙的發展方向。
-
智能化
+關注
關注
15文章
4687瀏覽量
54895 -
自動駕駛
+關注
關注
781文章
13449瀏覽量
165265 -
駕駛艙
+關注
關注
1文章
19瀏覽量
2698
原文標題:路暢胡錦敏:融合,汽車智能駕駛艙的發展方向
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
阿里發布智能駕駛艙:大屏橫貫中控不含任何按鍵
駕駛艙硬件仿真設計怎么實現?
飛機駕駛艙(Cockpit)Web圖像化服務器管理工具介紹
英特爾與東軟合作研發全新一代智能駕駛艙,無人車的駕駛艙是啥樣?
闡述中科創達智能駕駛艙解決方案以及智能網聯汽車領域的創新技術和戰略布局
英特爾、東軟集團、一汽紅旗合作 共同發布“智能駕駛艙平臺”
智能駕駛艙 是汽車顛覆式的創新點
駕駛艙和ADAS功能在軟件定義汽車中的集成







 工商網監
工商網監
評論