") 到底SLAM是什么,又有哪些好處?
到底SLAM是什么,又有哪些好處?
前兩天AI君的一個(gè)朋友跑來(lái)找我,說(shuō)他最近想買個(gè)掃地機(jī)器人,看到很多高端品牌的產(chǎn)品介紹里都會(huì)提到一個(gè)名詞,SLAM。
(圖片來(lái)自 戴森360eye售價(jià)6440)
(圖片來(lái)自irobot960售價(jià)4999)
而且他還發(fā)現(xiàn),提到SLAM的掃地機(jī)器人都會(huì)比一般的貴,有些還能邊掃邊通過App生成地圖。
所以到底SLAM是什么,又有哪些好處?今天就給大家簡(jiǎn)單科普一下。
SLAM的起源
SLAM的全名叫做Simultaneous Localization and Mapping,翻譯過來(lái)就是同步定位與建圖。用“一邊…一邊…”造句就是,一邊計(jì)算自身位置,一邊構(gòu)建地圖的過程。
具體是啥意思呢?
我們先來(lái)介紹下SLAM的“祖上”--潛艇定位。
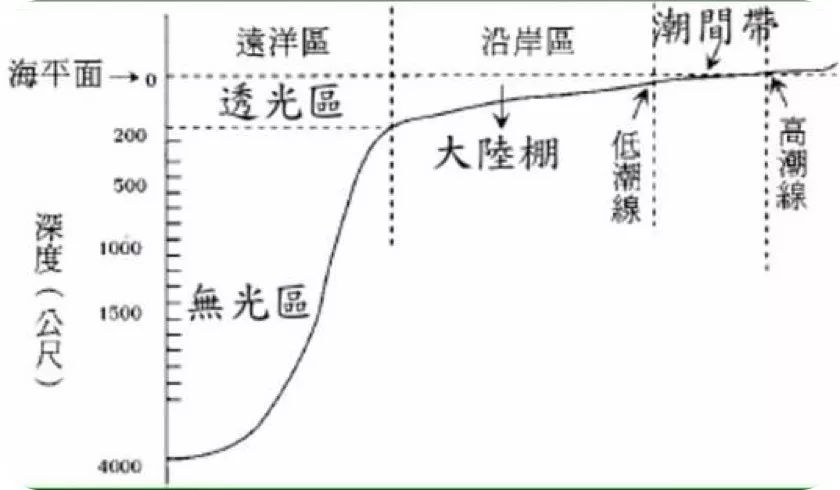
潛艇大家都知道,是在海底活動(dòng)的,通常潛艇的下潛深度在400~500m左右,這塊區(qū)域被稱為無(wú)光區(qū)(透光區(qū)也用不著潛艇了…)。
在這樣的環(huán)境中活動(dòng)差不多就跟你現(xiàn)在閉上眼睛在房間里走動(dòng)一樣,指不定就碰上什么了。
所以為了能安全執(zhí)行軍事任務(wù),潛艇多數(shù)是用INS(慣性導(dǎo)航)和APS(水聲導(dǎo)航)聯(lián)合定位,加上航跡測(cè)繪和海圖資料推算大致的艦艇位置,并且通過天文導(dǎo)航來(lái)糾正。
除此之外,潛艇還會(huì)進(jìn)行嚴(yán)謹(jǐn)?shù)暮D測(cè)繪、洋流測(cè)繪、海底地形測(cè)繪等一系列的水文測(cè)繪,最終形成水文海圖。
像這樣定位加測(cè)繪制圖的過程就是SLAM的雛形。
順便提一句:
潛艇花錢可以買,但是水文資料沒人會(huì)賣給你,所以周邊國(guó)家即使擁有了先進(jìn)的潛艇,但是沒有自己詳細(xì)的水文海圖資料,也無(wú)法發(fā)揮潛艇的戰(zhàn)斗力,甚至嚴(yán)重限制了潛艇的活動(dòng)范圍。這也是為什么我們要驅(qū)趕他國(guó)迫近的水文測(cè)量船的原因。
傳感器,SLAM的眼
SLAM要實(shí)現(xiàn)定位和制圖,第一步就是采集數(shù)據(jù),而采集數(shù)據(jù)的關(guān)鍵就是傳感器,可以說(shuō)沒有傳感器就沒有SLAM。而SLAM上的傳感器種類多樣,目前主流的我們可以將其分為兩大類:激光雷達(dá)和攝像頭。
以激光雷達(dá)為傳感器的SLAM,我們簡(jiǎn)稱為激光SLAM。
激光雷達(dá)能測(cè)量周圍障礙點(diǎn)的角度和距離等信息,其特點(diǎn)是快、準(zhǔn)、小,就是采集速度快、測(cè)量精準(zhǔn)、計(jì)算量小。因?yàn)檫@些優(yōu)點(diǎn),激光雷達(dá)廣泛應(yīng)用于軍事領(lǐng)域,比如激光制導(dǎo)導(dǎo)彈。
但是好東西都有一個(gè)特點(diǎn),那就是貴。因此用了激光SLAM的商品通常都很貴,比如豪車。
這是世界上最早宣布實(shí)現(xiàn)自動(dòng)駕駛L3級(jí)別的量產(chǎn)車型--2018款?yuàn)W迪A8,就是蜘蛛俠的“教練車”,售價(jià)120萬(wàn)。
這里需要注意幾個(gè)點(diǎn):
L3級(jí)別是自動(dòng)駕駛技術(shù)分級(jí),有L0~5 6個(gè)級(jí)別,L0就是人為駕駛,L5則是完全自動(dòng)駕駛。特斯拉目前實(shí)現(xiàn)了L2級(jí)別。
目前有很多品牌汽車聲稱實(shí)現(xiàn)L3級(jí)別,但是都仍處于試驗(yàn)階段,真正敢讓消費(fèi)者(并且是高端消費(fèi)者)買了用的只有奧迪A8。
之所以?shī)W迪敢將自家的L3級(jí)別自動(dòng)駕駛技術(shù)拿來(lái)賣,一個(gè)原因就是它用的傳感器多,而且還用上了別家沒有的激光傳感器。
(擁有自動(dòng)駕駛功能汽車的傳感器配置 知乎-陳光)
有了如此多的傳感器,奧迪A8對(duì)周圍環(huán)境就有了更廣的感知范圍,有了激光雷達(dá)就有了更精確的角度和距離的測(cè)量。這些就是奧迪的底氣。
看到這兒有人要問了,既然都用了這么多傳感器了,咋還沒實(shí)現(xiàn)L4級(jí)別的完全自動(dòng)駕駛呢?
其實(shí)如果在特定的路段,L4是可以實(shí)現(xiàn)的。但是,現(xiàn)實(shí)路況的復(fù)雜程度你也知道,連擁有“究極傳感器”-眼睛的人類都不能保證沒有刮擦,再加上萬(wàn)惡的加塞,只能說(shuō)L4可能不是單純靠技術(shù)就能實(shí)現(xiàn)的。
(傳感器表示也很為難)
我們?cè)僬f(shuō)回傳感器。
另一種傳感器就是大家很熟悉的攝像頭。以攝像頭為傳感器的SLAM叫VSLAM,即視覺SLAM。
視覺SLAM的一大優(yōu)勢(shì)就是價(jià)格便宜。
室內(nèi)應(yīng)用較廣的中低端近距離平面激光雷達(dá)也是千元級(jí)的,差不多跟高端工業(yè)攝像頭同價(jià),而A8上高端室外多線激光雷達(dá)價(jià)格則更高。雖然激光雷達(dá)的價(jià)格隨著量產(chǎn)可能會(huì)大幅下降,但是能否降到同檔次攝像頭的水平尚未可知。
當(dāng)然,視覺SLAM也不是“便宜沒好貨”的存在,相反視覺SLAM的應(yīng)用場(chǎng)景比激光雷達(dá)更豐富。
為什么呢?就是因?yàn)閿z像頭能拍攝畫面。能拍攝畫面的好處就在于視覺SLAM可以用在各種復(fù)雜且動(dòng)態(tài)的場(chǎng)景。打個(gè)比方,如果未來(lái)要實(shí)現(xiàn)機(jī)器人管家,就得依靠視覺SLAM告訴他廚房和客廳的區(qū)別,到廚房可以做飯,而到了客廳就可以播放音樂。
視覺SLAM和激光SLAM其實(shí)各有千秋,各自的優(yōu)缺點(diǎn)還有很多,在具體的應(yīng)用環(huán)境中往往也是兩者結(jié)合使用,這里就不往下細(xì)說(shuō)了。
回到開頭提到的掃地機(jī)器人,帶SLAM和不帶SLAM的產(chǎn)品價(jià)格差異大,說(shuō)到底就是清掃效率不同。顯然,通過SLAM測(cè)量建圖的掃地機(jī)器人,能基于構(gòu)建的地圖規(guī)劃路線,更高效的覆蓋目標(biāo)清掃區(qū)域。
AR,你身邊的SLAM
如果你家沒買自動(dòng)駕駛汽車,也沒買掃地機(jī)器人,那么還有一種方式能讓你直觀感受SLAM,那就是AR。
AR的學(xué)名叫增強(qiáng)現(xiàn)實(shí)。相信很多人看到這個(gè)詞會(huì)馬上想到一款游戲--Pokemon Go。
沒錯(cuò),Pokemon Go就是AR游戲。
氮素!
(劃重點(diǎn),要考)
pokemongo里并沒有SLAM。
為什么呢?
因?yàn)閜okemon go里的小精靈也好,精靈球也好,不會(huì)隨著你的手機(jī)移動(dòng)而變化。而真正用了SLAM的AR是這樣的:
在這里,iPad攝像頭就是視覺傳感器,開啟后開始定位并實(shí)時(shí)建圖,根據(jù)小孩的位姿變化不斷調(diào)整畫作的大小和位置,讓你感覺仿佛這幅名作就真實(shí)出現(xiàn)在你面前,用行話說(shuō)就是,沉浸感很強(qiáng)。
提到沉浸感,就不得不說(shuō)我們網(wǎng)易AR的技術(shù)了。
// 硬廣時(shí)間 //
首先我們的SLAM測(cè)量建圖精準(zhǔn),不會(huì)有“出戲”的沉浸感。
其次機(jī)型覆蓋率高。視覺SLAM的運(yùn)算負(fù)荷比較大,如果用千元機(jī)使用AR,由于硬件的原因往往會(huì)出現(xiàn)卡頓等渣效果。而我們網(wǎng)易AR,通過技術(shù)優(yōu)化使AR更加穩(wěn)定和低耗,輕松覆蓋市面上95%的機(jī)型。(沒理由歧視千元機(jī)嘛!)
另外就是渲染能力。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50664瀏覽量
751939 -
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31786 -
掃地機(jī)器人
+關(guān)注
關(guān)注
20文章
779瀏覽量
53364
原文標(biāo)題:想買掃地機(jī)器人,為什么有些價(jià)格特別貴?
文章出處:【微信號(hào):gh_70d0cce81c74,微信公眾號(hào):網(wǎng)易人工智能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
什么是SLAM?視覺SLAM怎么實(shí)現(xiàn)?

SLAM技術(shù)的應(yīng)用及發(fā)展現(xiàn)狀
讓機(jī)器人完美建圖的SLAM 3.0到底是何方神圣?
SLAM技術(shù)目前主要應(yīng)用在哪些領(lǐng)域
激光SLAM與視覺SLAM有什么區(qū)別?
基于視覺的slam自動(dòng)駕駛
SLAM的相關(guān)知識(shí)點(diǎn)分享
HOOFR-SLAM的系統(tǒng)框架及其特征提取
高仙SLAM具體的技術(shù)是什么?SLAM2.0有哪些優(yōu)勢(shì)?

SLAM的原理 手持SLAM的優(yōu)缺點(diǎn)講解
slam技術(shù)研究現(xiàn)狀 SLAM技術(shù)開發(fā)和應(yīng)用挑戰(zhàn)
視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論