") 磁懸浮軸承的有哪些類(lèi)型?如何使用COMSOL軟件來(lái)模擬磁懸浮軸承?
磁懸浮軸承的有哪些類(lèi)型?如何使用COMSOL軟件來(lái)模擬磁懸浮軸承?
磁懸浮軸承廣泛用在各種工業(yè)應(yīng)用中,比如發(fā)電、石油提煉、渦輪機(jī)械、泵機(jī)和飛輪儲(chǔ)能系統(tǒng)。和機(jī)械軸承不同的是,這類(lèi)軸承是利用磁懸浮而非物理接觸來(lái)支承移動(dòng)載荷的。由于磁懸浮軸承運(yùn)行時(shí)不產(chǎn)生摩擦且無(wú)需潤(rùn)滑,維護(hù)費(fèi)用也低,因此正逐漸取代機(jī)械軸承,更何況這種軸承的使用壽命還更長(zhǎng)。現(xiàn)在我們一起來(lái)了解如何使用 COMSOL Multiphysics? 軟件計(jì)算磁力、扭矩和磁剛度等設(shè)計(jì)參數(shù)。
磁懸浮軸承的類(lèi)型
根據(jù)工作方式的不同,磁懸浮軸承 可以分為兩種類(lèi)型:有源磁軸承(AMB)或無(wú)源磁軸承(PMB)。有源磁軸承依靠鐵磁材料和電磁體(線(xiàn)圈和鐵芯)之間的吸引力起作用。無(wú)源磁軸承依靠永磁體(PM)之間和/或傳導(dǎo)面與永磁體之間的排斥力起作用。
有源磁軸承
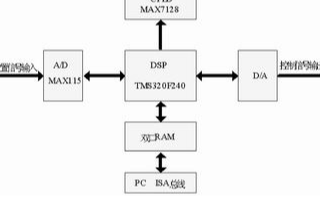
有源磁軸承由一個(gè)靜止零件定子 和一個(gè)旋轉(zhuǎn)零件轉(zhuǎn)子 構(gòu)成,定子包含電磁體和位置傳感器,轉(zhuǎn)子圍繞軸旋轉(zhuǎn)。在正常工作條件下,最理想的情況是,轉(zhuǎn)子位于中心,與定子相隔一定的間隙,且間隙長(zhǎng)度相等。不過(guò),在遇到干擾時(shí),轉(zhuǎn)子的位置會(huì)受控于一個(gè)閉環(huán)反饋系統(tǒng)。傳感器測(cè)量出轉(zhuǎn)子的位置發(fā)生變化,隨后將之傳送到數(shù)字控制器。數(shù)字控制器處理好數(shù)據(jù)后,將信號(hào)傳送給功率放大器。后者重新調(diào)整電磁體的電流,推動(dòng)轉(zhuǎn)子回到原來(lái)的位置。為了重新調(diào)整轉(zhuǎn)子,設(shè)計(jì)人員必須要知道轉(zhuǎn)子處于不同偏移位置時(shí)的磁力以及相應(yīng)的電流,這一點(diǎn)很重要。
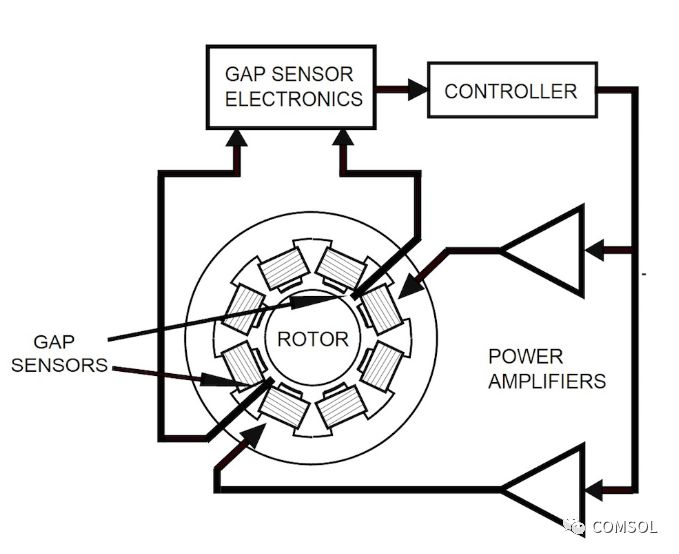
有源磁軸承組件的示意圖。圖片屬于公有領(lǐng)域,通過(guò) Wikimedia Commons 共享。
有源磁軸承的優(yōu)點(diǎn)是能主動(dòng)控制轉(zhuǎn)子的位置,但與此同時(shí),這也造成電子電路功耗較大,運(yùn)行成本較高。當(dāng)然,我們可以通過(guò)優(yōu)化電磁體的設(shè)計(jì),降低運(yùn)行所需的功率,從而減少運(yùn)行成本。COMSOL Multiphysics 便是這一優(yōu)化過(guò)程中可以使用的有用工具。
在模擬包括定子和轉(zhuǎn)子在內(nèi)的有源磁軸承時(shí),最佳途徑是使用“AC/DC 模塊”中的旋轉(zhuǎn)機(jī)械,磁 接口。這個(gè)模擬過(guò)程與發(fā)電機(jī)或電動(dòng)機(jī)的模擬非常相似,請(qǐng)查閱我們的二維發(fā)電機(jī)教程。
使用磁場(chǎng) 接口可以模擬永磁體和導(dǎo)電線(xiàn)圈(單匝或多匝線(xiàn)圈)。但是由于存在旋轉(zhuǎn),所以無(wú)法模擬感應(yīng)電流。如果感應(yīng)電流可以忽略不計(jì),那么模型就可以建立在穩(wěn)態(tài)域或頻域,并對(duì)轉(zhuǎn)子的各個(gè)位置添加參數(shù)化掃描研究,從而計(jì)算磁力或扭矩。
無(wú)源磁軸承
無(wú)源磁軸承 使用永磁體,不需要傳感器和控制電路或輸入功率。永磁體上兩個(gè)磁極之間的磁斥力使空氣間隙的長(zhǎng)度保持不變,如永久磁軸承所示,或者依靠永磁體與旋轉(zhuǎn)導(dǎo)電盤(pán)或軸之間的電動(dòng)懸浮(EDS)也可以使這個(gè)長(zhǎng)度保持不變,如電動(dòng)軸承所示。 使用永磁體的無(wú)源磁軸承的幾何與仿真結(jié)果顯示如下。
左圖:使用永磁體的軸向磁懸浮軸承的幾何。黑色箭頭表示永磁體的磁化方向。右圖:顯示磁通密度(箭頭圖)的結(jié)果圖以及磁通密度模的曲面圖。
電動(dòng)軸承
當(dāng)導(dǎo)電的轉(zhuǎn)子在永磁體產(chǎn)生的磁場(chǎng)中旋轉(zhuǎn)時(shí),這個(gè)轉(zhuǎn)子上會(huì)感應(yīng)出渦流。這些渦流反過(guò)來(lái)會(huì)形成一個(gè)與永磁體產(chǎn)生的磁場(chǎng)方向相反的磁場(chǎng),從而在旋轉(zhuǎn)的轉(zhuǎn)子導(dǎo)體與靜態(tài)永磁體之間產(chǎn)生排斥力。轉(zhuǎn)子的位移一直在這一磁斥力的作用下保持不變。因此,轉(zhuǎn)子在中心旋轉(zhuǎn)時(shí),間隙的長(zhǎng)度不變。
電動(dòng)軸承可進(jìn)一步分為徑向電動(dòng)軸承和軸向電動(dòng)軸承。磁通量與轉(zhuǎn)子軸平行時(shí)為徑向電動(dòng)軸承,磁通量與轉(zhuǎn)子軸垂直時(shí)為軸向電動(dòng)軸承。
徑向電動(dòng)軸承
徑向電動(dòng)軸承 由一個(gè)固定在旋轉(zhuǎn)軸上的導(dǎo)電圓柱體構(gòu)成。永磁體零件堆疊在鐵環(huán)之間,定子和轉(zhuǎn)子間的空氣間隙中會(huì)產(chǎn)生與軸線(xiàn)平行的朝內(nèi)或朝外的磁通量。電動(dòng)軸承教程是使用磁場(chǎng)和電場(chǎng) 接口求解的,可從“案例下載”中下載。還計(jì)算了不同偏移位置上的磁力。
左圖:徑向電動(dòng)軸承的三維幾何。右圖:顯示有定子(鐵芯和磁體)的磁通密度(x 軸偏移位置為 1.5 毫米時(shí))以及導(dǎo)電轉(zhuǎn)子中渦流(灰度標(biāo))的徑向電動(dòng)軸承。
軸向電動(dòng)軸承
軸向電動(dòng)軸承的截面剖視圖配置如下所示。導(dǎo)電盤(pán)貼著轉(zhuǎn)子,磁性材料(軛鐵)用于引導(dǎo)永磁體的磁場(chǎng),從而使磁通線(xiàn)平行于轉(zhuǎn)子軸。這就是術(shù)語(yǔ)軸向電動(dòng)軸承 的由來(lái)。
在這個(gè)設(shè)計(jì)中,空氣間隙相對(duì)較小,磁通路徑十分高效。相關(guān)的完整教程可以從“案例下載”中下載。
左圖:軸向電動(dòng)軸承的截面剖視圖。右圖:顯示有定子磁通密度和導(dǎo)電轉(zhuǎn)子渦流的軸向電動(dòng)軸承。還顯示了箭頭圖。
上述兩個(gè)電動(dòng)軸承示例在 COMSOL Multiphysics 中都是用磁場(chǎng)和電場(chǎng) 接口模擬的。在這兩個(gè)示例中,速度(洛倫茲項(xiàng)) 特征都用于指定旋轉(zhuǎn)速度。使用這個(gè)方法后,就無(wú)需利用移動(dòng)網(wǎng)格 接口考慮轉(zhuǎn)子的旋轉(zhuǎn)了。
請(qǐng)注意,只有當(dāng)移動(dòng)域不包含隨材料一起移動(dòng)的指定磁源,如線(xiàn)圈或永磁體(固定或感應(yīng)的)時(shí),才可以使用“速度(洛倫茲項(xiàng))”特征。移動(dòng)域的運(yùn)動(dòng)方向必須保持不變。比如,“速度(洛倫茲項(xiàng))”特征可以用于模擬導(dǎo)電的(非磁性的)均勻旋轉(zhuǎn)盤(pán)。相關(guān)的例子有電磁制動(dòng)器、電動(dòng)軸承、單極發(fā)電機(jī)、無(wú)限均勻移動(dòng)平面上的磁體(如磁鐵在銅管中下落或磁懸浮列車(chē))以及流經(jīng)磁體的均勻?qū)щ娏黧w的流動(dòng)(如液態(tài)金屬泵或霍爾發(fā)生器/霍爾推進(jìn)器)。
注:洛倫茲項(xiàng)準(zhǔn)確地描述了移動(dòng)域中由穩(wěn)態(tài)磁源引起的感應(yīng)現(xiàn)象,前提是移動(dòng)域(包括其材料屬性)不會(huì)隨運(yùn)動(dòng)方向而變化。此外,感應(yīng)現(xiàn)象可能是由于穩(wěn)態(tài)源的強(qiáng)度或不斷改變的速度的短暫變化引起的。洛倫茲項(xiàng)不會(huì)考慮到此類(lèi)短暫變化帶來(lái)的影響。
磁力/扭矩
COMSOL Multiphysics 中有兩種方法可用于計(jì)算電磁力和扭矩。最常見(jiàn)的方法是 Maxwell 應(yīng)力張量 法,常用于以下接口中的計(jì)算力 特征:磁場(chǎng) 接口;磁場(chǎng),無(wú)電流 接口;磁場(chǎng)和電場(chǎng) 接口;以及旋轉(zhuǎn)機(jī)械,磁接口。
舉例來(lái)說(shuō),添加了計(jì)算力 特征后,就可以在磁場(chǎng)接口中使用磁力的空間分量 (mf.Forcex_0, mf.Forcey_0, mf.Forcez_0) 和軸向扭矩 ( mf.Tax_0) 進(jìn)行后處理。計(jì)算力 特征只對(duì) Maxwell 應(yīng)力進(jìn)行積分,僅計(jì)算選定的一個(gè)域(或多個(gè)域)外側(cè)以及可選擇域的整個(gè)外部邊界上的應(yīng)力,這幾個(gè)域應(yīng)當(dāng)是一起移動(dòng)的一組域(一個(gè)機(jī)械體)。因?yàn)檫@種方法基于表面積分,所以計(jì)算的力易受網(wǎng)格大小的影響。使用這種方法時(shí),往往需要執(zhí)行網(wǎng)格細(xì)化研究,才能使計(jì)算得到的力或扭矩正確。
如果應(yīng)用了“計(jì)算力”特征的域與外部邊界、周期性邊界和一致對(duì)相接觸,則“計(jì)算力”得到的結(jié)果可能不正確。而且,要計(jì)算附加在鐵磁表面的磁體的力,接觸邊界上必須指派一個(gè)薄低磁導(dǎo)率間隙(在靜電邊界則指派薄低介電常數(shù)間隙),因?yàn)橐?jì)算的是空氣中的 Maxwell 應(yīng)力,而不是鐵磁(電介質(zhì))材料中的 Maxwell 應(yīng)力。
第二種方法是洛倫茲力法,僅適用于計(jì)算非磁性導(dǎo)電域中的磁力這種特殊情況。洛倫茲力定義為 F = J × B,其中 J 表示電流密度,B 表示磁通密度。洛倫茲力能十分準(zhǔn)確地計(jì)算導(dǎo)電域中的力,因?yàn)槠溆?jì)算依據(jù)的是體積而非邊界。因此,盡可能優(yōu)先使用洛倫茲力法,而非 Maxwell 應(yīng)力張量法。
除了以上提到的內(nèi)置方法之外,還可以使用虛功法或虛位移原理計(jì)算磁力和扭矩。在這一技巧中,力的計(jì)算也就是研究少量位移對(duì)電磁能的影響。在 COMSOL Multiphysics 中通過(guò)使用針對(duì)變形網(wǎng)格和靈敏度分析的特征,可以實(shí)現(xiàn)虛功法。
磁剛度
在固體力學(xué)中,剛度表示一個(gè)物體的硬度,即物體在受力時(shí)抵抗變形的程度。在磁懸浮軸承應(yīng)用中,這個(gè)參數(shù)相應(yīng)地定義為磁剛度,它是總磁力相對(duì)于位置的負(fù)導(dǎo)數(shù)。如果磁力為 


鏈接教程闡述了如何利用該方法計(jì)算軸向磁懸浮軸承的磁剛度。不過(guò)這個(gè)示例僅適用于二維軸對(duì)稱(chēng)的軸承,因此無(wú)法得到 x 向和 y 向的磁剛度。要計(jì)算所有方向上的磁剛度,需要在三維中模擬此問(wèn)題。下面,我們將對(duì)上述軸向磁懸浮軸承創(chuàng)建一個(gè)三維模型,并確定其剛度 kx 。可以從“案例下載”中下載這個(gè)示例教程。
這個(gè)方法主要涉及使用磁場(chǎng),變形幾何 接口以及靈敏度 接口。同二維模型一樣,我們也會(huì)用到磁場(chǎng) 接口。磁體模擬時(shí)使用了安培定律 特征,其本構(gòu)關(guān)系設(shè)置為 1[T] 的剩余磁通密度。計(jì)算力 只須添加到內(nèi)部磁體,并將幾何參數(shù)化,使內(nèi)部磁體的位置在 x 方向上存在 x0 的偏移。參數(shù)x0 隨后會(huì)用于參數(shù)化掃描。另外,變形幾何 接口將用于分析向 x 方向的附加(虛擬)網(wǎng)格位移 dx所施加的力的靈敏度。計(jì)算 x 向的磁剛度時(shí)這里僅使用四分之一幾何。
注意,此配置中僅正確計(jì)算了 x 軸上的力。根據(jù)對(duì)稱(chēng)性,y 向和 z 向的力應(yīng)當(dāng)為零。不過(guò)因?yàn)閮H模擬了四分之一幾何,所以計(jì)算出的力會(huì)相當(dāng)大。同樣地,還可以計(jì)算 y 向的剛度,即根據(jù) yz 平面和 xy 平面分別對(duì)稱(chēng)地切割整個(gè)模型,獲得四分之一模型并對(duì)其進(jìn)行分析。
左圖:用于計(jì)算剛度的軸向磁懸浮軸承的四分之一三維模型。右圖:半個(gè)模型中的磁通密度模和磁通密度箭頭圖。結(jié)果是使用“三維鏡像”數(shù)據(jù)集在 xy 平面繪制的。
變形幾何接口對(duì)無(wú)限元域以外的所有其他域都進(jìn)行了求解。要求解這個(gè)區(qū)域,首先在磁體附近的空氣域添加一個(gè)自由變形 節(jié)點(diǎn)。同樣地,可以向沿 x 軸的內(nèi)部磁體域添加一個(gè)指定的變形 dx。最后,向內(nèi)部磁體邊界和對(duì)稱(chēng)的截平面邊界添加兩個(gè)指定網(wǎng)格位移節(jié)點(diǎn),如下圖所示。
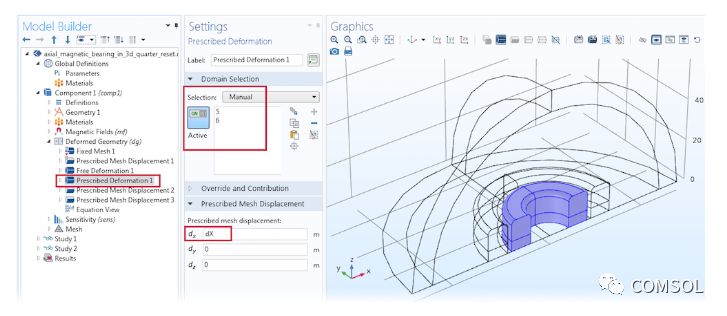
內(nèi)部磁體域上設(shè)置的指定變形。
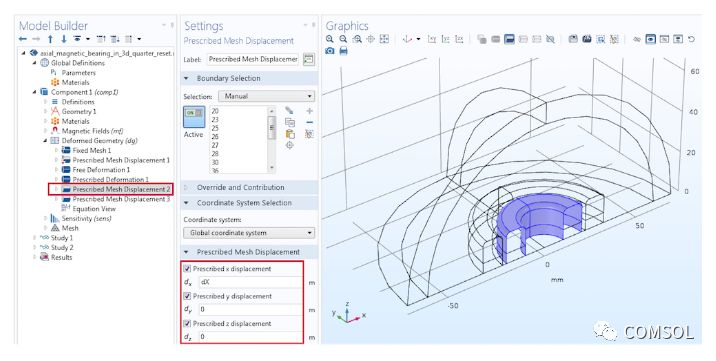
內(nèi)部磁體邊界上設(shè)置的指定網(wǎng)格位移。
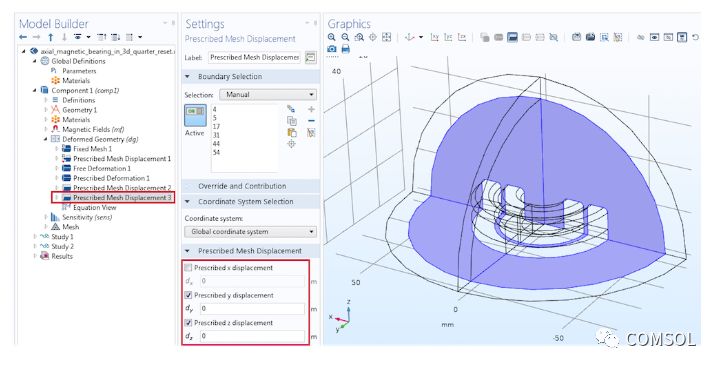
對(duì)稱(chēng)截平面上設(shè)置的指定網(wǎng)格位移。
在靈敏度 接口中添加全局目標(biāo) 特征,在“全局目標(biāo)”設(shè)定下的目標(biāo)表達(dá)式中指定 x 向的總力(即,4*mf.Forcex_0)。這里,mf.Forcex_0 指磁場(chǎng) 接口中“計(jì)算力”特征計(jì)算出的 Maxwell 應(yīng)力張量力的 x 分量。同樣地,添加全局控制變量 dX,如下圖所示。
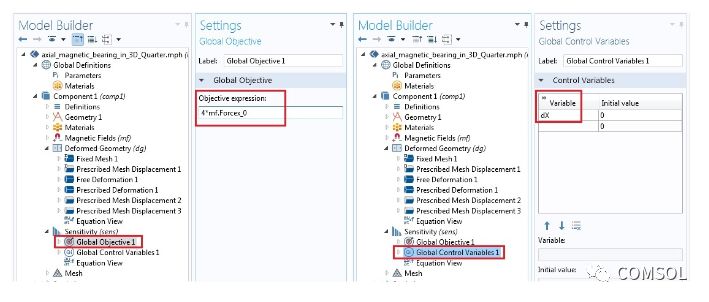
全局目標(biāo)設(shè)置(左圖)和全局控制變量設(shè)置(右圖)。
因?yàn)殪`敏度(和優(yōu)化)研究不能與參數(shù)化掃描 研究節(jié)點(diǎn)合并,所以模型必須在兩個(gè)單獨(dú)的研究中求解。第一個(gè)研究包含靈敏度求解器和穩(wěn)態(tài)求解器。隨后的第二個(gè)研究包含參數(shù)化掃描研究,但會(huì)使用研究 1 作為參考。對(duì)參數(shù) X0 在 range(0,1.5/20,1.5) 區(qū)間內(nèi)執(zhí)行參數(shù)化掃描,其設(shè)置如下。
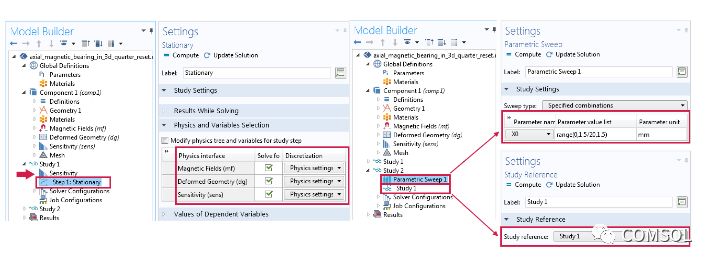
左圖:靈敏度分析的穩(wěn)態(tài)研究設(shè)置。右圖:以研究 1 為參考的參數(shù)化掃描研究設(shè)置。
將 x 軸上的磁力和 x 向的磁剛度繪制為一維全局圖。
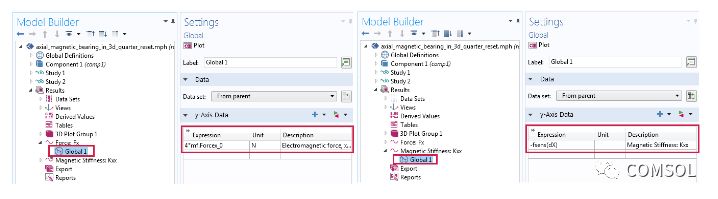
磁力圖的設(shè)置(左圖)和磁剛度的設(shè)置(右圖)。
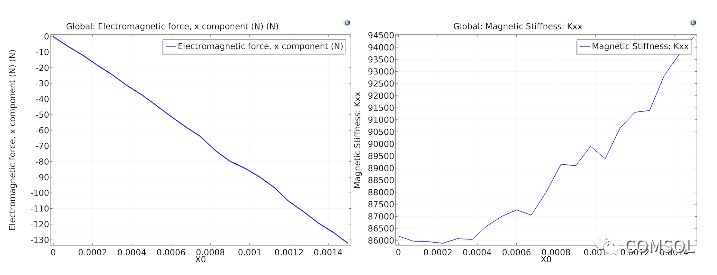
左圖:電磁力的 x 分量是 x 軸上偏移的函數(shù)。右圖:磁剛度kxx 是 x 軸上偏移的函數(shù)。
總結(jié)
在本文中,我們討論了使用 COMSOL Multiphysics 的 “AC/DC 模塊”的接口可以模擬的幾類(lèi)磁懸浮軸承。仿真簡(jiǎn)化了這幾類(lèi)軸承設(shè)計(jì)參數(shù)的計(jì)算方法,從而優(yōu)化了軸承性能,延長(zhǎng)了使用壽命。
-
磁懸浮
+關(guān)注
關(guān)注
10文章
99瀏覽量
19886 -
工業(yè)應(yīng)用
+關(guān)注
關(guān)注
0文章
51瀏覽量
15398 -
COMSOL
+關(guān)注
關(guān)注
34文章
93瀏覽量
55685
原文標(biāo)題:使用 COMSOL 軟件模擬磁懸浮軸承
文章出處:【微信號(hào):COMSOL-China,微信公眾號(hào):COMSOL】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
磁懸浮儲(chǔ)能飛輪上的逆變器
磁懸浮列車(chē)
【EVB-335X-II申請(qǐng)】磁懸浮平臺(tái)控制
磁懸浮用線(xiàn)性霍爾元件 磁懸浮霍爾應(yīng)用
需要磁懸浮高度可以達(dá)到20cm,載重2kg以上的磁懸浮裝置,誰(shuí)能做?
磁懸浮慣性動(dòng)量輪是由哪些部分組成的?磁懸浮慣性動(dòng)量輪各部分的功能有哪些?
磁懸浮科普介紹
基于CPLD的飛輪磁懸浮軸承低功耗開(kāi)關(guān)功率放大器研究
基于工控PC+DSP控制器實(shí)現(xiàn)磁懸浮軸承控制系統(tǒng)的設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論