 PWM的原理是什么?調制器是怎樣實現的?
PWM的原理是什么?調制器是怎樣實現的?
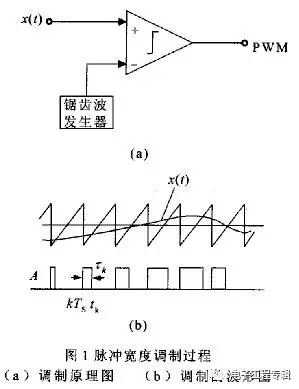
一、 PWM(脈沖寬度調制Pulse Width Modulation)原理:脈沖寬度調制波通常由一列占空比不同的矩形脈沖構成,其占空比與信號的瞬時采樣值成比例。圖1所示為脈沖寬度調制系統的原理框圖和波形圖。該系統有一個比較器和一個周期為Ts的鋸齒波發生器組成。語音信號如果大于鋸齒波信號,比較器輸出正常數A,否則輸出0。因此,從圖1中可以看出,比較器輸出一列下降沿調制的脈沖寬度調制波。

其中,x{t}是離散化的語音信號;Ts是采樣周期;
 p(t)可以表示為:
p(t)可以表示為: 

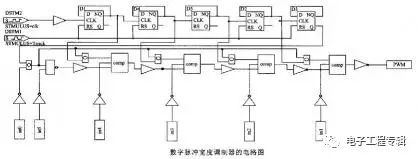
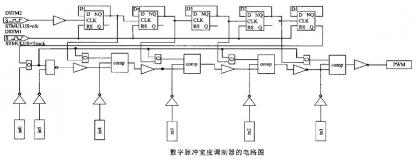
二、 數字脈沖寬度調制器的實現:實現數字脈沖寬度調制器的基本思想參看圖2。
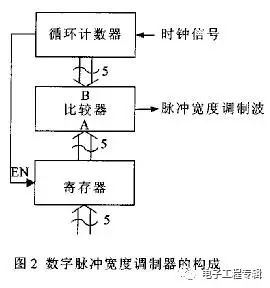
圖中,在時鐘脈沖的作用下,循環計數器的5位輸出逐次增大。5位數字調制信號用一個寄存器來控制,不斷于循環計數器的輸出進行比較,當調制信號大于循環計數器的輸出時,比較器輸出高電平,否則輸出低電平。循環計數器循環一個周期后,向寄存器發出一個使能信號EN,寄存器送入下一組數據。在每一個計數器計數周期,由于輸入的調制信號的大小不同,比較器輸出端輸出的高電平個數不一樣,因而產生出占空比不同的脈沖寬度調制波。
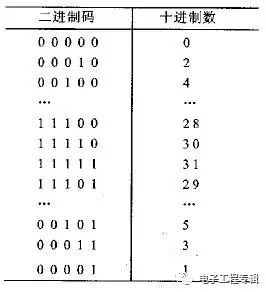
為了使矩形脈沖的中心近似在t=kTs處,計數器所產生的數字碼不是由小到大或由大到小順序變化,而是將數據分成偶數序列和奇數序列,在一個計數周期,偶數序列由小變大,直到最大值,然后變為對奇數序列計數,變化為由大到小。如圖3例子。
奇偶序列的產生方法是將計數器的最后一位作為比較數據的最低位,在一個計數周期內,前半個周期計數器輸出最低位為0,其他高位逐次增大,則產生的數據即為偶數序列;后半個周期輸出最低位為1,其余高位依次減小,產生的數據為依次減小的偶序列。具體電路可以由以下電路圖表示:
三、 8051中的PWM模塊設計:應該稱為一個適合語音處理的PWM模塊,輸出引腳應該外接一積分電路。輸出波形的方式適合作語音處理。設計精度為8位。PWM模塊應包括:1、 比較部分(Comp):2、 計數部分(Counter):3、 狀態及控制信號寄存/控制器(PWM_Ctrl);1) 狀態積寄存器:(Flags),地址:E8H ;①EN: PWM模塊啟動位,置位為‘1’將使PWM模塊開始工作;②(留空備用)③④解調速率標志位:00 – 無分頻;01 – 2分頻;10 – 10分頻;11 – 16分頻。 (RESET后為00)⑤(留空備用)⑥(留空備用)⑦(留空備用)⑧(留空備用)注意:該寄存器可以位操作情況下可寫,不可讀;只能在字節操作方式下讀取。2) 數據寄存器(DataStore),地址:F8H;注意:該寄存器值不可讀,只可寫。
4、 端口:1) 數據總線(DataBus);(雙向)2) 地址總線(AddrBus);(IN)3) PWM波輸出端口(PWMOut);(OUT)4) 控制線:① CLK:時鐘;(IN)② Reset:異步復位信號;(IN 低電平有效)③ WR:寫PWM RAM信號;(IN 低電平有效); ④ RD:讀PWM RAM信號;(IN 低電平有效)⑤ DONE:接受完畢反饋信號;(OUT 高電平有效)⑥ INT:中斷申請信號;(OUT 低電平有效)⑦ IntResp:中斷響應信號;(In低電平有效)⑧ ByteBit:字節/位操作控制信號(IN 1-BYTE 0-BIT);⑨中斷占用相當于MCU8051的外部中斷2,則可保證在5個指令周期之內,“讀取數據”中斷必定得到響應。
PWM模塊使用方法:因為占用了8051外部中斷1,所以在不使用該模塊時,應該把外部中斷2屏蔽。而PWM模塊產生的中斷請求可以看作是“能接受數據”的信號。中斷方法如后“中斷讀取數據過程”。使用PWM模塊,應該先對內部地址8FH的數據寄存器寫入數據,然后設置地址8EH的狀態寄存器最低位(0)為‘1’,即PWM模塊開始工作并輸出PWM調制波(如TIMER模塊)。在輸出PWM調制波過程中,應及時對PWM寫入下一個調制數據,保證PWM連續工作,輸出波形連續。 (待改進)
中斷讀取數據過程:
PWM模塊可以讀取數據,申請中斷信號INT置位為‘0’,等待8051響應;
8051接受到中斷申請后,作出中斷響應,置位IntResp信號線為‘0’;
PWM模塊收到IntResp信號后,把中斷申請信號INT復位為‘1’,等待8051通知讀取數據WR信號;
8051取出要求數據放于數據總線(DataBus)上,并置WR信號為‘0’;
PWM模塊發現WR信號為‘0’,由數據總線(DataBus)上讀取數據到內部數據寄存器,將DONE位置位為‘1’;
8051發現DONE信號的上跳變為‘1’,釋放數據總線;
PWM模塊完成當前輸出周期,復位DONE為‘0’,從此當前數據寄存器可以再次接受數據輸入。
注意事項:
1)輸出的PWM信號中的高電平部分必須處于一個輸出周期的中間,不能偏離,否則輸出語音經過低通后必定是一失真嚴重的結果。
2)對于8位精度的PWM,每個輸出周期占用256(28)個機器周期,但是包含256個機器周期至少有22個指令周期,亦即264(22*12)個機器周期,由于語音信號的連續性,256與264之間相差的8個機器周期是不能由之丟空的,否則也會使輸出信號失真。如果將須輸出數字量按256/264的比例放大輸出,亦不可行,因為如此非整數比例放大,放大倍數很小,則經過再量化后小數部分亦會被忽略掉,產生失真。舉例:輸出數字量為16,按比例放大后為16.5,更會產生難以取舍的問題。
故采取以下辦法:該模塊以時鐘周期為標準,而與TMBus無關,即基本上與8051部分異步工作。讀取數據方式為每次讀取足夠數據段儲存于模塊內的RAM內(暫定每次讀取8字節),儲存字節數必須能保證PWM輸出該段數據過程中,有足夠時間從RAM處繼續讀取數據。由于占用了8051的外部中斷2,中斷申請在3個指令周期(36個時鐘周期)內必定能得到響應,而PWM模塊處理一個數據需要固定耗時256個時鐘周期,故能保證PWM模塊順序讀取數據中斷能及時得到響應,不會影響調制信號的連續性。
3)RD RAM過程是異步過程。
4)輸出后數據寄存器不自動清零。因為可以通過把Flags(0)寫‘0’而停止PWM模塊繼續工作。
HMX
-
PWM
+關注
關注
114文章
5153瀏覽量
213456 -
脈沖
+關注
關注
20文章
886瀏覽量
95563 -
調制器
+關注
關注
3文章
834瀏覽量
45111
原文標題:PWM (脈沖寬度調制)原理與實現
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問FM調制器的FPGA實現
Δ-Σ 調制器是如何工作的?
調制器的原理及應用
電光調制器,電光調制器工作原理是什么?
用三個運放實現脈沖寬度調制器,3 OPAMP implement PWM controler
如何使用FPGA實現QPSK調制器的設計與實現
LTC6992演示電路-TimerBlox壓控脈寬調制器(1 MHz PWM)






 工商網監
工商網監
評論