 人類手指靈巧,但是機器人正在迎頭趕上
人類手指靈巧,但是機器人正在迎頭趕上
人類手指靈巧,但是機器人正在迎頭趕上。
在1973年的經典科幻電影《西部世界》中,度假勝地的機器人員工與人類客人沒有什么區別,除了一個小線索:工程師們還沒有完善機器人的手。
現實機器人的能力遠遠落后于《西部世界》中的機器人殺手,但在這一小點上,現實和虛構是一致的:手和物體的操控,正是機器人技術中特別具有挑戰性的一部分。加州大學伯克利分校的工程師Ken Goldberg說:“抓握是目前(機器人技術)最重要的挑戰。”
來源:Sam Chivers
在過去的50年里,機器人在嚴格控制的工作條件下已經表現得非常好,例如在汽車裝配線上。昆士蘭科技大學澳大利亞機器人視覺中心(ACRV)的機器人研究員Juxi Leitner說:“你可以針對一項特定的任務建立一個機器人系統,比如撿起一個汽車零件。你確切知道要把某個部件放置到什么位置,機械臂需要達到什么位置;因為機器人已從同一個地方拾起同樣的部件幾百萬次了。”
但現實世界不是一條可預測的裝配線。盡管人類可以輕松地與工廠大門之外的無數物體和環境相互作用,但這對于機器人來說卻極其困難。
這些幾無章法可言的環境是機器人研究人員需要攻克的下一個前沿領域,它們對于機器人抓握來說是特別棘手的。任何希望與外界進行實體交互的機器人都不得不面對一個問題:物體對觸摸的反應具有內在不確定性。Goldberg說:“預測遙遠的小行星的運動比我們預測一個簡單物體被推過桌子的運動要容易得多。”
一些研究人員正在使用機器學習來使機器人獨立識別和設計如何抓取物體。另外一些人則正在改進硬件——機械手從鉗形結構到仿人手,不一而足。機器人學家也正全力以赴應對如何操控抓握住的物體這一挑戰。
提升機器人抓握能力可能會產生巨大的社會影響。商業實體,特別是涉及各種貨物運輸的實體,正在密切關注著相關研究的發展。“這方面具有巨大的需求。伴隨著電子商務的飛速發展,產業界非常希望能解決這個問題。”Goldberg說。業界的研究興趣比以往任何時候都大,“這是一個將研究真正付諸實踐的好機會。”
學會學習
過去三年來,電子商務巨頭亞馬遜組織的年度競賽充分體現了產業界對此的濃厚興趣。亞馬遜機器人挑戰賽(Amazon Robotics Challenge)要求參賽隊伍設計并制造一種機器人,讓它根據客戶訂單將物品從集裝箱中分揀出來,然后放進盒子內。
物品種類多樣,從瓶子、碗到軟玩具和海綿,皆包括在內;而且這些物品一開始是混雜在一起的,這使得物體辨別和機械抓握都非常具有難度。
2017年7月,Leitner的ACRV隊建造的機器人Cartman奪得了挑戰賽的勝利。Cartman類似于游樂場中的抓娃娃機,由一個鋁制框架支撐機械爪組件構成。它有兩個用于拾取物體的工具——末端執行器,一個是兩塊平行板組成的抓器,另一個是連接了真空泵的吸盤。
對于機器人遇到的每一個物體,研究人員都指定了應該首先嘗試哪一個執行器;如果不起作用,機器人就會切換另一個。
不過,機器人首先必須找到它所要尋找的物品。為此,ACRV隊采用了機器學習方法。Cartman主要依靠業內流行的RGB-D相機獲得輸入,RGB-D相機可以同時獲取物體顏色和深度信息。相機通過執行器向下看,看到下面盒子的內部。
Leitner解釋說,這個角度有利于Cartman標記每個像素對應的物品——這是一種被稱為語義分割的深度學習形式。一旦找到目標物品的像素群,相機的深度感應能力就可以幫助機器人計算出如何抓取該物品。Leitner說:“簡單地說,我們把物品露在外面最多的那部分固定住。”
機器人抓取技術的最新進展得益于機器學習的快速發展。“軟件一直是制約瓶頸,但由于深度學習,它正變得越來越先進。”加州大學伯克利分校的深度學習專家Pieter Abbeel說。這些發展開啟了“機器人應用的全新途徑”。
Abbeel是加利福尼亞埃默里維爾的一家初創公司covariant.ai的聯合創始人和首席科學家,公司使用深度學習來訓練機器人。與其設定機器人執行特定的動作,倒不如通過人類示范教會機器人適應同一問題的不同場景。
人類教練通過頭戴裝置觀看機器人手臂上相機的反饋圖像,并使用運動控制來引導機器人手臂拾取物體。在此過程中所采用的方法數據會傳輸給神經網絡。“只要有幾百次這樣的演示,你就可以訓練一個深度神經網絡學會一項技能。”Abbeel說,“我的意思是,機器人不是掌握了一種它將重復執行的特定動作,而是掌握了根據相機反饋來調整動作的能力。”
Goldberg也同樣使用機器學習來訓練機器人掌握抓握技巧。但他不是從真實世界中收集數據,而是對他的Dex-Net軟件進行虛擬訓練。“我們可以迅速模擬出數以百萬計的抓握。”他說。該軟件使工業機器人能從成堆的物體中拾取指定物品,即使是它以前沒有見過的,且成功率超過90%。應對某個特定物體時,它還可以自己決定是使用平行鉗夾還是吸盤工具。
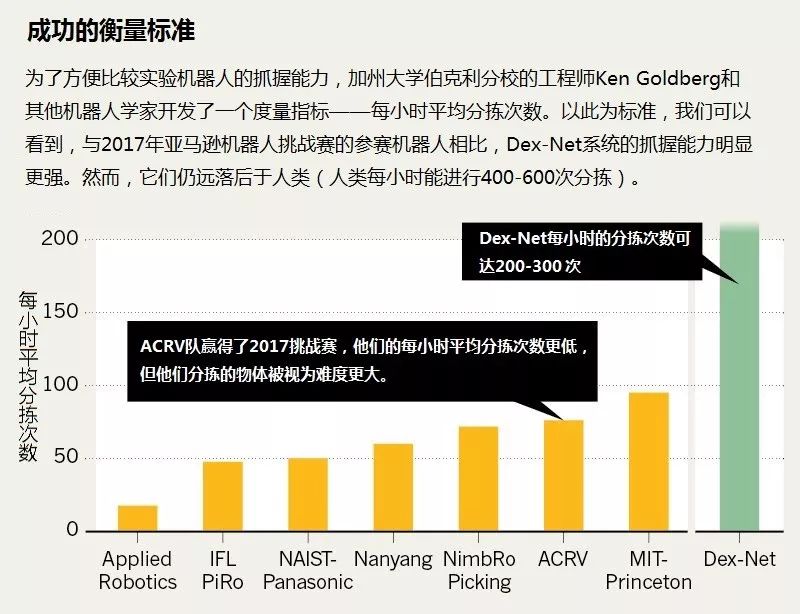
第四代Dex-Net將于2018年面世。根據Goldberg和其他機器人學家開發的一種體現可重復性的度量指標——每小時平均分揀次數,Dex-Net目前屬于最快的一類分揀機器人,每小時平均分揀次數可以達到200次以上,雖然仍然落后于人類——約為400到600次,但還是遠遠超過最近的亞馬遜機器人挑戰賽參賽團隊所取得的成績(見“成功的衡量標準”)。
來源:Ken Goldberg
但Dex-Net的模擬世界是不完善的。例如,該模型假定物品都是剛性的,不考慮包含液體的物體。Abbeel表示,對機器學習來講,模擬可能并不總是最簡單的方法。“真實世界是免費的模擬器,”他說,“如果機器學習能平衡這兩種方式是最好的。”
輕柔地抓取
Goldberg和Leitner采用了流行的平行鉗夾和吸盤組合:2017年亞馬遜機器人挑戰賽中的大多數團隊都是這樣。但是這些工具是如何抓取物體的呢?——提前規劃好接觸點再盡可能精確地移動到位,這與我們人類使用雙手的方式是非常不同的。
柏林工業大學的機器人學家Oliver Brock說:“如果你要從桌子上拿起一樣東西,比如筆,你首先接觸到的是桌子。”我們不考慮需要把手指放在哪里。人手比較柔軟,可以做到柔性接觸——手指根據物體表面情況而發生變化。麻省理工學院的機器人學家Daniela Rus說:“因為人手和物體之間具有較大的接觸面,你可以憑直覺接觸和抓取。因為柔軟的手指,我們改變了抓握的方式。”
許多人正在試圖將柔性引入機器人機械爪中,以發揮柔性抓取的優勢。Brock的實驗室開發了“RBO Hand 2”——一個有五根硅膠手指的仿人手機械臂。通過壓縮空氣的移動控制這些硅膠手指,讓手指能夠根據需要彎曲和伸直。
雖然仿人類的手指可能并不適合每一種任務,但卻是與我們所生活的世界進行互動的理想方式。“這個世界是為人手設計的。”Brock說。不過他的機器人手的擬人化設計還有另一層考量。“說來尷尬,”他說,“一般人,甚至是機器人學家,都更喜歡那些看起來像人類的東西。”
柔性的好處已經吸引了商界的注意。馬薩諸塞州劍橋市的Soft Robotics公司制造了一種氣動鉗夾,比Brock的研究模型更像爪狀,并已在工廠里試用,用于處理易碎產品,避免發生損害。
另一家初創公司——馬薩諸塞州薩默維爾的Righthand Robotics正為當前流行的機械爪和吸盤裝置添加柔性特征。公司設計的爪子有三根柔性手指,中間是可伸縮的吸盤。
公司聯合創始人Lael Odhner說,該設計的靈感來自于猛禽;這些鳥類大部分前臂肌肉組織都附著在一組直達爪尖的肌腱上。類似地,Odhner的機械爪馬達的所有力量都被用于一個單一的閉合動作中。這個簡單的動作犧牲了執行精細運動的能力,但提高了可靠性——對于商業用途的夾鉗來說這是一個重要的考量。但是,可伸縮吸盤則彌補了其中的不足。Odhner說:“它取代了幾十個精密的致動器,否則你將不得不把它們全部安裝在機械手上。”
一手掌控
柔性對于機器人學來說還是比較新的。Rus說:“這是一個非常強大的概念,但人們才剛剛開始探索它。”
一種常見的批評意見是:一個柔軟的機械手在抓住物體后,很難做出有用的動作。Rus解釋說“你能很好地抓握物體,”但“你不知道手中物體的確切朝向”。這使得操控物體變得棘手。Goldberg對此表示贊同:“一只柔軟、可以包蓋物體的手,實際上降低了手中物體的能見度。”
人類解決這個問題的方式很簡單:觸摸。但很少有機器人被賦予這種能力。“人們一致認為賦予機器人觸覺很重要,”Brock說,只是這很難做到。
他正在探索利用兩種方法來賦予他的柔性機械手觸覺。較成熟的方法是將液態金屬管嵌入包裹在機器人手指周圍的硅膠片中,然后利用金屬管周圍的電阻監測所受的力。“測量手指每個部分所受的應力,根據這些數據并通過機器學習來推斷手指到底發生了什么變化。”這個小組目前正在評估每個手指上需要多少個應力傳感器來測量各種力。
Brock的另一種方法是利用聲學來獲得觸覺。在概念驗證測試中,研究人員在柔性手指的氣腔內放置一個麥克風,然后通過收錄的聲音辨別手指的哪一部分接觸到物體、接觸的力量和物體的材料。將麥克風深埋入手指內,可以避免降低機械手指柔性。Brock說這項工作的細節將很快發表出來,而且他計劃與聲學專家合作以改善他的設計。
許多機器人學家認為,不太可能有一個普適的抓握解決方案。Rus指出,即使機器人能達到人類的靈巧程度, “還有很多東西是人類的手也無法抓取的。”但是隨著機器人抓握能力的不斷提升,越來越多目前由人類執行的任務將通過自動化方式完成。
去年發表的一份報告估計,大多數職業至少可以實現部分自動化。但Goldberg強調,研究機器人不是為了讓人們失業。“我的目標不是讓機器人取代人類,”他說,“而是讓機器人協助人類。”
不管結果如何,我們還需要取得大量研發進步才能真正迎來機器人革命。雖然Leitner團隊去年贏得了亞馬遜機器人挑戰賽,但其機器人手臂在比賽的第一天就摔壞了,而且大多數團隊也都遭遇了各式各樣的技術問題。“這些系統還不是非常穩健,” Leitner說,“如果你要在亞馬遜倉庫里使用它,我無法保證它實際能工作多久。”
“我仍然處在探索新世界的途中,”Brock說,“還沒有準備好走到聚光燈下,左右工業應用的發展。”但是,正如Goldberg所說,“實際應用已無阻礙,它已經開始發生了。”
-
機器人
+關注
關注
210文章
28231瀏覽量
206615 -
機器學習
+關注
關注
66文章
8382瀏覽量
132444
原文標題:?(?′?`??)機器手,離隨意抓取還有多遠?
文章出處:【微信號:cas-ciomp,微信公眾號:中科院長春光機所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
兆威機電發布機器人靈巧手重磅新品!單板控制,17個自由度,壽命大于10年
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
靈巧手成為機器人競爭下半場,但空心杯電機要失寵了?
眾擎機器人發布全尺寸人形機器人SE01
機器人技術的發展趨勢
堪稱地表最強“打工人”,人形機器人Figure02領銜靈巧手進化

Al大模型機器人
全球機器人開發領域采用NVIDIA 機器人開發和生產
戴盟機器人發布Sparky 1:人形機器人兩大陣營已現,要能跑能跳還是要心靈手巧

人形機器人成為車圈“新寵”?

國產人形機器人還需走多遠?






 工商網監
工商網監
評論