 人工智能助力水下機器人適應各種極端環境
人工智能助力水下機器人適應各種極端環境
美國科研人員正在利用人工智能幫助水下機器人適應各種極端環境,以完成勘察水中建筑安全狀況的任務。
海浪、風、水流、過往船只的尾流和建筑物周圍的漩渦使水域成為經驗豐富的船長所面臨的最復雜環境之一,更不用說機器人了。現在,美國史蒂文斯理工學院(Stevens Institute of Technology)的研究人員正在開發一種算法,教機器人適應不斷變化的海洋動態,以解決國民最關心的問題之一:保護和維護我們老化的海上基礎設施,如碼頭、管道、橋梁和水壩。
這項工作由史蒂文斯理工學院的機械工程教授布倫丹·恩格羅(Brendan Englot)領導,他正在努力應對這些水下建筑的頻率問題。目前,主要由潛水員對水下建筑物進行探測,但水下探測物遠比潛水員多得多。有時,潛水員必須潛到地表以下極度危險的深處,而他們的身體需要幾個星期才能恢復。恩格羅正在訓練機器人承擔這樣的任務——但這并不容易。
恩格羅說:“有很多水流會把機器人推得到處亂轉,而且水下的能見度通常很低,這使得水下運載工具很難像人在地面上行走或在空中行走那樣有態勢感知能力。”
恩格羅研究小組采用了一種叫做強化學習的人工智能技術,它使用不基于精確數學模型的算法;相反,它采用目標導向算法,教會機器人如何通過執行動作和觀察結果來實現復雜的目標。當機器人收集數據時,它會更新“策略”,找出在水下操作和導航的最佳方式。
他們收集的數據是聲納——這是最可靠的海底航行工具。就像海豚使用回聲定位技能一樣,恩格羅的機器人會發出高頻聲波,并測量聲波在反射周圍構造物后返回的時間,收集數據并感知周邊環境,同時可能被水流沖擊得東倒西歪。
最近,恩格羅派了一個機器人去執行一項自動任務,目標是繪制曼哈頓碼頭的地圖。“我們以前沒有那個碼頭的模型,”恩格羅說。“現在我們能夠把我們的機器人送下去,它最終能返回并在整個任務中成功地定位自己。”在恩格羅實驗室創建的算法的指導下,機器人能獨立移動,收集信息,最后生成一幅顯示碼頭支柱位置的3D地圖。
這些初步工作鼓舞人心,但是恩格羅正在努力擴展他的機器人的能力。恩格羅預計機器人能夠對從船體到近海石油平臺的一切情況進行常規檢查。此外,機器人還可以繪制地球廣闊的水下地形。
然而,實現這些目標意味著需解決聲納的局限性問題。恩格羅說:“想象一下,當你走在一棟建筑里,在走廊里穿行時,你會看到和醫用超聲波一樣的灰度、顆粒狀的視覺清晰度。”
一旦一個結構被繪制成地圖,自動機器人就可以計劃第二次“傳球”——使用攝像機對關鍵區域進行更高分辨率的檢查。恩格羅進一步設想了像鰻魚一樣的機器人,它們可以在縫隙和狹窄的空間中穿梭,甚至可以協助救援。恩格羅稱,要真正地利用這些技術,首先需要能夠穩定地航行。為此,恩格羅繼續調整他的算法來提供這種穩定性。
-
人工智能
+關注
關注
1791文章
46859瀏覽量
237580 -
水下機器人
+關注
關注
2文章
93瀏覽量
13619
原文標題:人工智能幫助水下機器人適應極端環境
文章出處:【微信號:AI_News,微信公眾號:人工智能快報】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
人工智能機器人關節控制板BGA芯片底部填充用膠方案

嵌入式和人工智能究竟是什么關系?
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
科沃斯助力吳中區機器人+人工智能產業發展
凱茉銳電子 SONYFCB-EV7100模組在水下機器人中的創新應用

FPGA在人工智能中的應用有哪些?
人工智能與機器人的區別
AI人工智能機器人產業--政府真正應承擔的責任與角色

5G智能物聯網課程之Aidlux下人工智能開發(SC171開發套件V2)
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
5G智能物聯網課程之Aidlux下人工智能開發(SC171開發套件V1)
鰭源全球首創QY-MT智測系統:引領水下機器人邁向AI無損測量新時代
2024人工智能發展八大趨勢
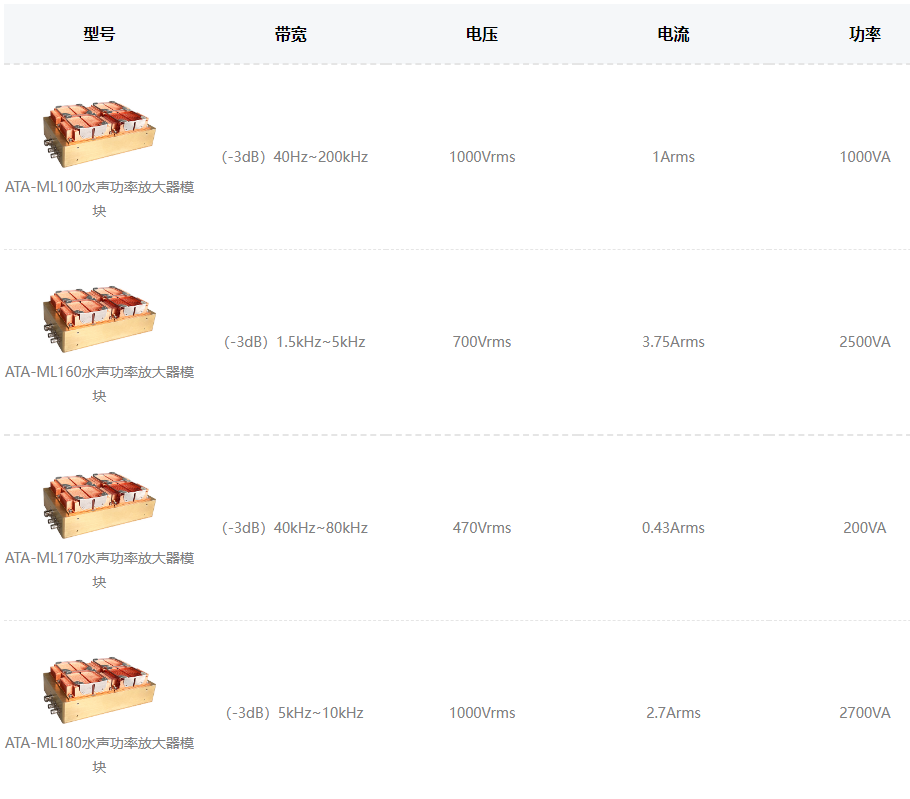
功率放大器模塊在水下機器人中的應用有哪些
智能移動機器人-將在未來扮演越來越重要的角色





 工商網監
工商網監
評論