 博瑞GEL2級別智能輔助駕駛試駕體驗
博瑞GEL2級別智能輔助駕駛試駕體驗
作為一款在吉利自主品牌戰略中的“核心”車型,6月23日上市的2018款吉利博瑞GE無論是在外型設計、主動安全功能配置、動力底盤開發等方面都進行了優化升級。其中,L2級安全輔助駕駛是其最大亮點。
近期《高工智能汽車》就其L2級別智能輔助駕駛功能進行了試駕體驗。
吉利博瑞GE是自主品牌第一款L2級B級車,其中主要包含了ICC智能領航系統、LKA車道保持系統、全速ACC自適應巡航系統(能夠實現時速0-150km/h區間的跟隨前車行駛和車輛啟停功能)、APA全自動智能泊車系統、SLIF交通限速標識智能識別、航機式HUD抬頭顯示系統、LIM電子限速、城市預碰撞、行人識別與保護等。
可以實現這些安全輔助功能主要是依托于,全車配置了21個傳感設備。其中包括12顆超聲波雷達、4顆全景攝像頭、1個單目攝像頭、1個記錄攝像頭、1個距毫米波雷達以及2個感應器。
其中ICC智能領航系統是博瑞GE主打的舒適安全輔助系統,其囊括了TJA交通擁堵輔助系統和ICA集成式高速巡航功能,能夠實現0-150KM/H范圍內同時對車輛進行巡航控制和車道中間控制。系統可以根據設定車速和跟車時距控制自己的車速,根據左右兩側的車道線控制自車在車道線中間行駛。
ICC智能領航功能其主要應用場景是高速公路或高架橋等路況較好的道路。在使用過程中需要駕駛員時刻保持車輛方向控制,當駕駛員手離開方向盤10S,系統會主動提醒駕駛員接管車輛;在ICC功能不能清晰解讀車道情況時,ICC車道保持輔助會自動退出,此時,車速控制和車間距始終保持激活狀態。
ACC自適應巡航系統和ICC智能領航系統功能幾乎相同,都能夠實現0-150KM/H范圍內同時對車輛進行巡航控制和車道中間控制;不同的是,ACC自適應巡航最低設置車速為30KM/H;在EV模式下,巡航速度區間是30-120KM/H,非EV模式30-150KM/H,同時還可以選擇跟車時距為1S、1.5S/1.9S三個選項。
AEB城市預碰撞安全系統,主要是通過單目攝像頭和中距毫米波雷達,實時監測前方車輛、行人等特殊場景,在危險發生前主動提醒駕駛者,并進行剎車減少事故發生。
博瑞GE主動剎車系統采用了博士提供的視覺融合毫米波雷達方案,增加了行人識別功能。相比博越和博瑞只依靠毫米波雷達的AEB方案,多傳感器融合方案在安全性和功能可以做的更好。當然,相應的算法可靠性和成本也會更高。
AEB功能可設置為:距離碰撞2.5秒時主動提醒,距離碰撞1.5秒時短促剎車報警,距離碰撞1秒時自動剎車避免碰撞/減少碰撞損失。
AEB功能在車輛速度在40km/h以內,可以完全避免與靜止車輛相撞,若時速或與前車速度差大于40km/h,只能降大幅度降低事故損傷程度,不能完全避免;
行人識別功能,可以探測到前方80cm以上的行人移動,并在潛在碰撞可能下自動剎車,無論是站立,步行還是跑步中均可識別,時速在25km/h以內,能夠完全避免與行人發生碰撞,若時速大于25km/h,則可大幅度降低事故損傷程度。
LKA車道保持系統,采用了博世第二代單目攝像頭識別車道線,高速行駛時,系統通過聲音,方向盤震動,以及輔助施加轉向力,保持當前車道行駛。
SVA盲點監測則是采用了4路高清環視攝像頭+超聲波雷達融合方案。高清攝像頭可檢測車身兩側寬約3米,長約20米的盲區范圍,超聲波雷達監測長寬約4.5米的盲區范圍,大幅提升監測范圍,提高報警精度。
盲點監測警告指示燈安裝在左右側外后視鏡上,車速在 30 至-140KM/H,盲點警告功能開啟。
盲點警告包括:一級報警,啟動發動機,車速 30 km/h 以上時,當在盲區中檢測到目標車輛,滯留時間大于 1 s 時,對應側的外后視鏡警示燈將亮起,直到目標車輛不在探測區域;
二級報警,如果駕駛員打開右側 ( 或左側 ) 轉向燈時,系統監測到有車輛在右后 ( 或左后 ) 盲區范圍內且滯留時間超過 1 s 時,右側 ( 或左側 ) 報警指示燈亮起,并開始閃爍,同時儀表會發出聲音報警,提醒駕駛者。
DOW開門預警則采用攝像頭檢測車身兩側寬約1.5米,長約10米的范圍,當監測到區域內有車輛或行人等移動,則向駕駛員發出警報,這一功能是目前符合國內道路場景的特色功能配置。
APA全自動泊車通過超聲波雷達,監測合適的停車位,其可讓博瑞GE實現水平泊車,垂直泊車和水平泊出功能,同時帶泊車緊急剎停功能。
SLIF交通限速標識智能識別通過前端的單目攝像頭,檢測并識別道路上設置的限速標志,然后通過液晶儀表、HUD抬頭顯示器進行限速顯示,當駕駛員超過限速標識速度的時候,輔助提醒駕駛員,讓危險止步。
HUD抬頭顯示通過前風擋反射式投影技術,平視化顯示實時車速,導航,轉向,油量,ACC時距,城市碰撞預警、限速標識等9項行車信息,可以避免低頭駕駛,專注前方道路。
除此之外,博瑞GE采用的是博世77G的前置中距離雷達,最大探測距離170米,這是除吉利博越上的駕駛輔助系統之外,吉利與博世合作的第二款車型,包括第五代超聲波雷達傳感器、全新一代77G中距離前置雷達在內的產品都由博世提供。
試駕感受——ICC多場景可靠性需要提升,LDW實用性最高:
此次試駕車型是吉利博瑞GE PHEV 1.5T 耀領版,(插電混動頂配版)終端售價為19.88萬(政府補貼2.2萬+地方補貼1.1萬),除了抬頭顯示HUD功能,上述功能都有。
試駕過程中,《高工智能汽車》挑選了深圳北環大道(單項四車道)、隧道、雙車道、蛇形道路、復雜山路等多個場景進行,盡量覆蓋日常生活場景。
ICC和ACC功能都可以實現0-150KM/H智能巡航和車道保持,但在試駕過程中,只有在高速公路且時速達到60KM/H以上的部分場景,其功能的實用性才得以體現出來。
在北環部分道路,將巡航速度設置為80KM/H,ICC/ACC功能對車速的控制較為線性,誤差很小;車道保持控制也可以修正車輛行駛路線,但轉向彎角極限大;反應遲鈍生澀;轉向角度類似階梯式、不夠線性。
ICC與駕駛員交互是最大雞肋。試駕過程中有一個漸急彎道,因為車道保持轉不過來,導致功能直接自動解除,受方向回正力影響,車子迅速偏離到其它車道線,而在過程中,車輛并沒有提醒駕駛員接管車輛,當時有點嚇人。
使用過程中,《高工智能汽車》發現,LKA車道保持功能實用性并不高。除高速公路,在道路豁口、隔離線、甚至是鐵柵欄、減速帶、特寬車道等場景,車道保持功能都會自動退出。
吉利汽車相關負責人表示,轉向不足對L2級自動駕駛問題不大,L2級別任然需要人為駕駛車輛,安全駕駛輔助功能只能輔助駕駛員駕駛車輛,屬于舒適功能。而對更高級別的自動駕駛可能會有問題。
出現車道保持功能退出主要有兩方面原因。第一,系統無法準確識別車道線,例如:車道線損壞、過寬、等等;第二,轉向偏離角局限,為了防止側翻,車輛的橫向便移速度是固定值。
例如,轉向靠EPS扭矩響應,其糾正橫向偏移速度為2m/s內的偏離,當車速80km/h時(22.22M/S),那么,一秒內車輛行駛22.22M直線距離,側向距離最多只能修正2M,有較大局限性,駕駛過程中,車輛橫向偏移超出修正極限,車道保持功能會自動退出。
除去高速公路、高架橋,在蛇形道路、交通參與者復雜的市區、非鋪裝山路等場景ICC也并不實用。在蛇形道路由于中距雷達視野有限,可能導致跟車目標丟失,導致ICC車輛加速。
在市區,如果ICC車輛與相鄰車道上的車輛過于靠近ICC車輛的車道,有可能發生ICC車輛發生制動。如果車輛切入ICC車輛路徑中,且在雷達的探測范圍中,則將被識別成目標車輛,并且按照目標車輛進行反應,可能導致車輛強力制動,使后車追尾。
當天現場工作人員也講到,目前,ICC系統也還不能準確識別行人、不能識別靜止或者緩慢移動的車輛物體。
例如,用于警示前方施工的塑料錐桶;對迎面而來的車輛也無法識別、對“減速帶”有誤識別可能性,特別是在紅綠燈的地方;駛出彎道,目標車輛有可能延遲或者受到干擾,ICC不能按照預期制動,或者制動過晚;ICC無法探測到目標車輛上裝載的突出其車身側面,后端,車頂的物體,路軌或者筑路用的金屬板等等金屬物體均可能干擾中距雷,使其無法正常工作。
如果前車突然制動,ICC會出現無法及時做出反應或者反應過慢的情況,在這種情況時,駕駛員不會收到接管請求,需要主動制動。
對于喜歡玩改裝車的朋友也要知道,結構性改裝帶有ADAS(安全輔助駕駛功能)的車輛,例如降低底盤的高度或者改變前端牌照安裝板均會影響功能的實用性。
BSD盲點監測是值得信賴的伙伴:
如果說ICC/ACC是部分場景可幫助更好的駕駛,那么LDW就是可信賴的伙伴,LDW盲點監測在日常駕駛中具有很高的實用性,而博瑞GE的這套LDW雖有不足,但實用性高、試駕體驗很棒。
在試駕中,這套盲點監測系統能夠探測到滯留于盲區內的常規車輛 ( 例如:乘用車、卡車、 巴士、摩托車等 )。對于小型助力摩托車或電動自行車識別準確率稍低一些,不能保證 100% 探測能力。
因為,博瑞GE的LDW功能采用了環視攝像頭融合超聲波雷達方案,在路面的干濕程度改變(水池倒影);車輛左右兩側的環境噪音值不同(聲波干擾);系統車輛與相鄰車道車輛的相對速度較大,車輛急加減速(系統響應不及時)等場景可能存在誤判行為,使用時需要注意應用場景,不能完全依賴該系統。
最后,出于安全等多方考慮,本次試駕沒有實地測試AEB功能。
-
adas
+關注
關注
309文章
2170瀏覽量
208532 -
吉利
+關注
關注
3文章
484瀏覽量
47500 -
AEB
+關注
關注
1文章
50瀏覽量
19879
原文標題:吉利博瑞GE ADAS試駕體驗!LDW是可信賴伙伴 | GGAI試駕
文章出處:【微信號:ilove-ev,微信公眾號:高工智能汽車】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
G-PAL新一代行泊一體系統:以卓越“智價比”重新定義全天候高階智駕
智己汽車邁入“直覺”智駕新時代
如何選擇智能駕駛輔助系統
l4級別自動駕駛的特點是什么
余承東交付問界M7,暢談L3智駕:華為輕松實現
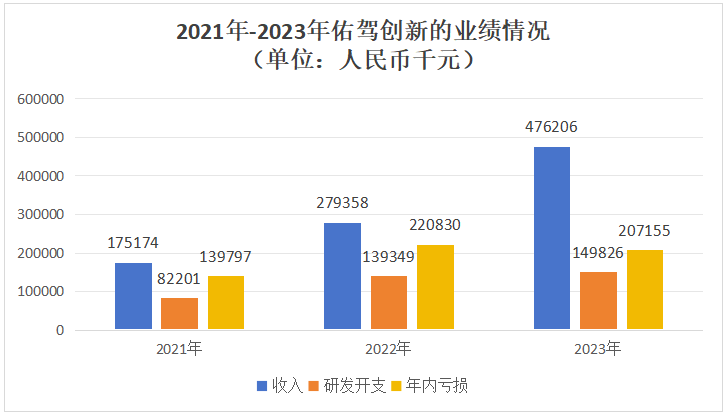
佑駕創新沖刺港股IPO!2024年智駕方案量產上車60款車型,拿下國內七大車企
黑芝麻智能華山A1000芯片已成功助力領克08 NOA智駕功能重磅升級






 工商網監
工商網監
評論