") 淺析3D成像技術(shù)的分類和原理
淺析3D成像技術(shù)的分類和原理
3D成像工作原理和分類
3D成像技術(shù)按照工作原理,首先分為被動式和主動式兩類。
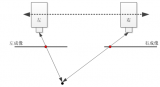
被動式視覺效仿生物的雙眼視覺(binocular vision)原理,由至少2枚圖像傳感器(image sensor)構(gòu)成,運用其觀測對象在每個圖像傳感器單獨成像的位置,結(jié)合2枚圖像傳感器的相對物理位置,根據(jù)幾何關(guān)系測量原理,可以計算出景深(depth)。請注意,景深和距離是不同的概念,如下圖1所示。
雙目視覺系統(tǒng)的核心在于關(guān)聯(lián)同一觀測點在各自圖像傳感器中的坐標位置,如上圖1的左圖所示。然而,在實際使用中,由于受到外部環(huán)境和拍攝對象表面紋理屬性等客觀因素影響,特征點自動匹配在算法上較為復(fù)雜,匹配精度也直接影響到景深計算精度,影響系統(tǒng)整體效果。
主動式視覺系統(tǒng)則由于其工作原理的不同,有效解決了這一問題。
主動式視覺系統(tǒng)利用獨立的人工光源,主動投射到觀測對象來測量景深。主動式視覺根據(jù)投射光源和景深技術(shù)原理的不同,又分為三小類:三角測距法、結(jié)構(gòu)光法、飛行時間法。如下圖2所示。下面做詳細介紹:
(1)三角測距法(triangular)
三角測距法是利用投射光源、觀測對象和接收圖像傳感器的空間位置,利用三角幾何學計算景深的方法。此方法是眾多主動式3D景深視覺系統(tǒng)的底層基礎(chǔ)算法。
(2)結(jié)構(gòu)光法(structured light)
結(jié)構(gòu)光法可以認為是針對在被動式視覺系統(tǒng)中特征點匹配問題的對策性方案。如下圖 3所示,結(jié)構(gòu)光的含義是主動光源通過特定圖案編碼投射到被測物體,例如將分布較密集的均勻光柵投影到被測物體上面,由于被測物體表面的不規(guī)則性具有的不同深度,反射到圖像傳感器的光柵條紋會有所變形,這個過程可以看作是由物體表面的深度信息對光柵的條紋進行了調(diào)制。通過對比圖像傳感器接收到的發(fā)生畸變的光柵圖案和原生圖案,就可以解析出每個觀測點的深度信息,形成深度點云(point cloud),即深度幀(depth frame)。
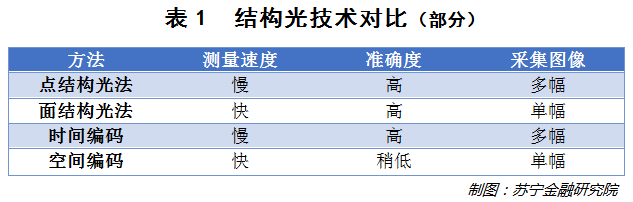
需要說明的是,結(jié)構(gòu)光法按投射方式還可分為點、線、面三種方式。按照圖案編碼方式亦可分為時間編碼、空間編碼和直接編碼(如灰度編碼)。這些技術(shù)皆為提高編碼圖案的解調(diào)抗干擾性,以及更快獲取深度點云而采取的不同技術(shù)手段,如下表1所示。目前,在移動終端領(lǐng)域,結(jié)構(gòu)光編碼以靜態(tài)編碼為主。
(3)飛行時間法(time of flight)
飛行時間又稱TOF,簡要來說,是基于測量投射的光源信號發(fā)射與接收之間的時間差,計算出景深或距離的一種景深計算方法。
TOF根據(jù)如何測量時間差又可細分為脈沖波測距和連續(xù)波測距。脈沖波測距原理是直接測量脈沖信號發(fā)射和接收的時間差;連續(xù)波測距則是通過連續(xù)發(fā)射整數(shù)波長,通過計算接收波與發(fā)射波之間的相位差,間接計算時間差,如下圖 4所示。
具體來說,脈沖波測距多用于工業(yè)測繪領(lǐng)域等大范圍遠距離場景,其使用的光源也以激光為主。對于手機終端設(shè)備而言,由于使用場景和功耗,意味著目標對象與鏡頭的距離在十米、百米以內(nèi),所以手機終端上使用的TOF預(yù)計將以連續(xù)波相位測距技術(shù)為主。
就目前而言,結(jié)構(gòu)光與TOF是主動景深視覺系統(tǒng)的主流技術(shù)實現(xiàn)方案。結(jié)構(gòu)光技術(shù)較為成熟,組件集成度高,目前蘋果iPhone X已采用結(jié)構(gòu)光技術(shù);TOF由于直接測量景深/距離,在響應(yīng)速度和量程兩方面具有先天技術(shù)優(yōu)勢,加上Google、Microsoft等國際一流企業(yè)的站臺背書,技術(shù)前景光明。
需要說明的是,主動式3D景深視覺系統(tǒng)在持續(xù)發(fā)展中開始借鑒被動雙目視覺系統(tǒng)的優(yōu)點,即通過引入2枚圖像傳感器(active stereo vision),利用圖像傳感器之間空間位置關(guān)系,以及雙路光源發(fā)射器到圖像傳感器的光源運動軌跡,達到更高精度的景深信息。例如,Intel最新發(fā)布的D400 Series景深攝像模塊就是采用該技術(shù)的代表。
3D成像和傳感市場概況
前文介紹了3D景深成像系統(tǒng)的工作原理。那么,3D成像技術(shù)是否存在市場需求?3D成像技術(shù)距離全面普及還有多久呢?我們可以從以下幾個維度來尋找答案。
(1)VCSEL市場增長情況
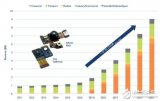
VCSEL激光器作為3D景深成像系統(tǒng)的核心部件,在消費電子領(lǐng)域的市場趨勢可以間接反映其3D景深市場需求和未來發(fā)展情況。如下圖5所示,根據(jù)Yole預(yù)計,隨著2017年iPhone X首次引入結(jié)構(gòu)光主動式3D成像系統(tǒng),VCSEL整體市場將以CAGR 48%的增速飛速增長,在消費電子領(lǐng)域,VCSEL市場大小從2017年的1.65億美元攀升至2023年的31億美元,增長幅度接近30倍。
(2)3D成像市場增長情況
據(jù)Yole預(yù)測,3D成像和傳感市場整體增長速度為CAGR 44%,在消費電子領(lǐng)域?qū)訡AGR 82%的速度高速增長,到2023年達到138億美元,如下圖6所示。
(3)3D景深在終端手機的占有率情況
主動式視覺系統(tǒng)由于其技術(shù)先進性,將會逐漸替代被動式雙目視覺系統(tǒng),逐漸被手機終端廠商采用。目前在3D成像領(lǐng)域,根據(jù)其結(jié)構(gòu)光和TOF技術(shù)的特性,一個較為共識的預(yù)測是基于結(jié)構(gòu)光技術(shù)的3D成像將作為手機前置攝像頭被采用,而TOF技術(shù)則將會在后置攝像頭更有前景。
目前蘋果作為手機終端高新技術(shù)的引領(lǐng)者,同時占據(jù)3D成像產(chǎn)業(yè)鏈內(nèi)一級供應(yīng)商的供貨渠道,預(yù)計將繼續(xù)領(lǐng)先安卓手機廠商1-2年時間率先部署3D景深攝像頭,如下圖7所示。
根據(jù)拓墣產(chǎn)業(yè)研究院分析,全球智能手機3D感測滲透率今年將從2017年的2.1%上揚至13.1%,蘋果仍將是主要采用者。另據(jù)其估計,2018年全球搭載3D感測模組的智能手機生產(chǎn)總量將達1.97億支,其中iPhone占據(jù)1.65億支。此外,2018年的3D感測模組市場產(chǎn)值預(yù)估約為51.2億美元,其中由iPhone貢獻的比重高達84.5%。預(yù)計至2020年,整體產(chǎn)值將達108.5億美元,而2018-2020年間的復(fù)合年均增長率將達到45.6%。
綜上所述,筆者認為,3D主動式景深成像技術(shù)將在未來2-3年內(nèi)加速普及,倘若上游供應(yīng)商有能力跟上安卓手機廠商的出貨量水平,為其提供優(yōu)質(zhì)的芯片、模組和解決方案,其普及速度會更快。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50678瀏覽量
751993 -
3D成像
+關(guān)注
關(guān)注
0文章
98瀏覽量
16044
原文標題:3D成像技術(shù)來襲,分類和原理你了解嗎? ||干貨
文章出處:【微信號:N1mobile,微信公眾號:第一手機界】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
機器視覺3D成像技術(shù)大全!
AR0237IR圖像傳感器推動3D成像技術(shù)的發(fā)展
使用DLP技術(shù)的3D打印
3D立體成像技術(shù)分析

3D成像與傳感器技術(shù)的應(yīng)用指南
3d成像融合傳感技術(shù):3D機器視覺引爆市場
淺析3D視覺成像技術(shù)在物聯(lián)網(wǎng)中的應(yīng)用
淺析3D結(jié)構(gòu)光技術(shù)
什么是3D成像_3D成像應(yīng)用
關(guān)于3D視覺成像技術(shù)方案的簡述

幾種典型的3D視覺成像方案 機器人視覺3D成像方法比較
掃描3D成像方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論