") 以板球系統(tǒng)為對象提出了一種反演自適應(yīng)動態(tài)滑模控制方法
以板球系統(tǒng)為對象提出了一種反演自適應(yīng)動態(tài)滑模控制方法
摘要:
針對板球系統(tǒng)對期望軌跡的跟蹤問題,提出了一種反演自適應(yīng)動態(tài)滑模控制方法。考慮實際情況下外界干擾及不確定量的未知性,結(jié)合自適應(yīng)控制對未知量邊界進行估計。為了有效削弱對數(shù)學(xué)模型的依賴性,同時規(guī)避反演法中的微分大爆炸現(xiàn)象,引入動態(tài)面策略。考慮是否存在外界不確定干擾劃分出兩種實驗環(huán)境,分別運用本文方法和動態(tài)滑模的方法進行了仿真實驗。仿真結(jié)果表明,所設(shè)計控制器對系統(tǒng)參數(shù)攝動和外界干擾不敏感,該方法能較好地實現(xiàn)小球的軌跡跟蹤,具有良好的動態(tài)跟蹤性能,體現(xiàn)出較強的魯棒性和自適應(yīng)特性。
0 引言
板球系統(tǒng)是一個典型的多變量、欠驅(qū)動非線性系統(tǒng)[1],從20世紀(jì)80年代開始,板球系統(tǒng)因其結(jié)果的直觀性以及結(jié)構(gòu)的簡易性,被廣泛用于各類控制算法性能的驗證,受到國內(nèi)外的廣泛關(guān)注[2-4]。在對期望軌跡的跟蹤過程中,板球系統(tǒng)的控制條件干擾因素眾多。各種外界存在的不確定性擾動使得控制變得異常復(fù)雜,也給系統(tǒng)的精確建模帶來很多的困難,單純的線性化很難達到理想的要求[5-6]。板球系統(tǒng)控制器的設(shè)計日漸成為關(guān)鍵的問題,一系列針對抑制非線性、強耦合和不確定性對系統(tǒng)性能影響的算法被提出,魯棒控制[7]、滑模控制[8]以及自適應(yīng)控制[9]等,都在一定程度上提高了系統(tǒng)的響應(yīng)速度和控制精度。
滑模變結(jié)構(gòu)控制作為控制理論中一種特殊的非線性控制策略,可以根據(jù)系統(tǒng)當(dāng)前的狀態(tài),控制系統(tǒng)按照預(yù)定的狀態(tài)軌跡運動[10-11]。這種滑動模態(tài)的設(shè)計對系統(tǒng)參數(shù)和外部干擾均有很好的魯棒性。且因算法相對簡單,在工程實現(xiàn)過程較為容易,而被廣泛應(yīng)用于實際現(xiàn)場設(shè)備。但是滑模變結(jié)構(gòu)的開關(guān)特性會引發(fā)實際系統(tǒng)強烈的高頻抖振問題[12]。這種高頻抖振會破壞系統(tǒng)的穩(wěn)定性,影響系統(tǒng)的控制精度。為了解決這一問題,文獻[13]重點討論了模糊滑模控制的方法,通過模糊算法調(diào)節(jié)指數(shù)趨近律的參數(shù),設(shè)計了一種模糊滑模控制器。文獻[14]結(jié)合系統(tǒng)參數(shù)不確定性,采用自適應(yīng)變結(jié)構(gòu)控制方案,使得系統(tǒng)信號保持有界。文獻[15]采用的趨近律滑模變結(jié)構(gòu)控制方法以及文獻[16]的神經(jīng)網(wǎng)絡(luò)滑模控制都在一定程度上避免了抖振現(xiàn)象的出現(xiàn)。但是上述方法均沒有綜合考慮系統(tǒng)的不確定性因素和外在干擾。
本文針對板球系統(tǒng)多變量、易受不確定因素影響而導(dǎo)致控制器難以設(shè)計、魯棒性差的問題,提出一種反演自適應(yīng)動態(tài)面滑模控制方法。在反推過程中,綜合考慮每一步設(shè)計控制量時的相互制約性,在確保系統(tǒng)滿足Lyapunov全局漸近穩(wěn)定性的基礎(chǔ)上,通過將自適應(yīng)技術(shù)與動態(tài)滑模算法相結(jié)合,對外在干擾值進行估計,設(shè)計了新的切換函數(shù)。該方法對建模誤差、外界干擾等不確定因素均不敏感,具有良好的自適應(yīng)能力和魯棒性能。
1 系統(tǒng)描述及分析
板球系統(tǒng)的主要結(jié)構(gòu)由2個直流電機、球盤、小球、攝像頭、工控機等部分構(gòu)成。工控機內(nèi)控制板驅(qū)動2個直流電機分別控制球盤x軸方向和y軸方向的升降,經(jīng)球盤的運動可調(diào)整盤中小球位置,進而實現(xiàn)對期望軌跡的跟蹤。球盤上方的攝像頭結(jié)合圖像視覺系統(tǒng)對小球的位置信息進行實時采集。通過位置信息對比,及時調(diào)整小球位置,完成軌跡跟蹤。
其中,動力學(xué)機構(gòu)部分由于機械誤差以及控制性能各種復(fù)雜干擾條件眾多,對板球系統(tǒng)的精確跟蹤及抗擾性能有著很高的要求。能否有效提高板球系統(tǒng)動力學(xué)機構(gòu)的控制性能,對板球系統(tǒng)的整體控制性能有著決定性的影響。為了便于動力學(xué)建模與分析,針對板球系統(tǒng)動力學(xué)機構(gòu),考慮以下假設(shè)情況:
(1)任何情況下,球和平板都接觸;
(2)不考慮板的面積和旋轉(zhuǎn)角度限制;
(3)球在板上沒有滑動和繞其豎直中心軸的轉(zhuǎn)動;
(4)板在x軸和y軸方向上關(guān)于其支撐點對稱。
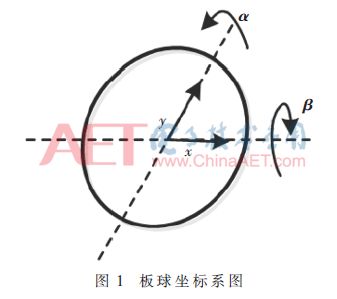
建立板球系統(tǒng)坐標(biāo)系如圖1所示,參考文獻[17],結(jié)合以上假設(shè),依據(jù)拉格朗日力學(xué)方法進行動力學(xué)分析建立板球系統(tǒng)動力學(xué)狀態(tài)方程如下:
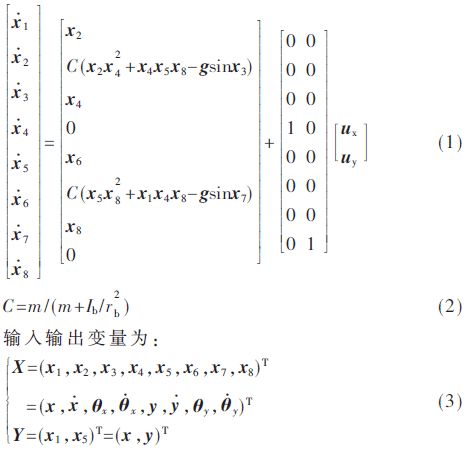
假設(shè)x軸和y軸之間的耦合項足夠小,則板球系統(tǒng)可按x軸和y軸方向解耦為2個相同的子系統(tǒng)。將系統(tǒng)耦合量及不確定量設(shè)為d,由式(2)得x軸的子系統(tǒng)狀態(tài)方程為:
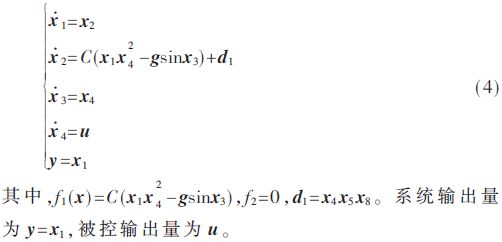
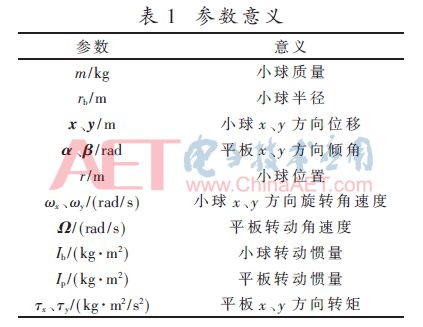
各參數(shù)含義見表1。
2 反演自適應(yīng)動態(tài)滑模控制器設(shè)計
滑模變結(jié)構(gòu)控制方法在對非線性系統(tǒng)的處理和控制中獲得了廣泛的應(yīng)用。但常規(guī)滑模變結(jié)構(gòu)控制不可避免地存在“抖振”問題。作為一種消除“抖振”的有效方法,動態(tài)滑模控制被應(yīng)用到移動機器人、并聯(lián)機器人、機械臂等非線性系統(tǒng)中。下面利用反演法,基于動態(tài)滑模控制理論,結(jié)合自適應(yīng)技術(shù),進行控制器設(shè)計,|di(t,x)|≤D(D為干擾上界)。
步驟1 令指令信號為連續(xù)函數(shù)x1,結(jié)合式(4)第1個方程,定義系統(tǒng)誤差面為e1=x1-x1d。預(yù)選Lyapunov函數(shù)對時間求導(dǎo)得:

將x2作為式(5)的虛擬控制變量,設(shè)常數(shù)c1為正實數(shù),設(shè)計反饋控制律為:
3 實驗仿真及分析
3.1 實驗仿真
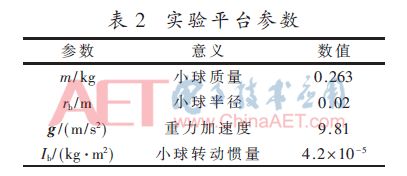
為了驗證本文算法所設(shè)計動態(tài)滑模控制器的控制精度以及運行時間等性能,分別對板球系統(tǒng)的x軸、y軸設(shè)計軌跡跟蹤模型。實驗仿真環(huán)境為MATLAB 2015a, CPU為Intel Core i5,內(nèi)存為DDR3 4 GB,實驗平臺參數(shù)如表2所示。
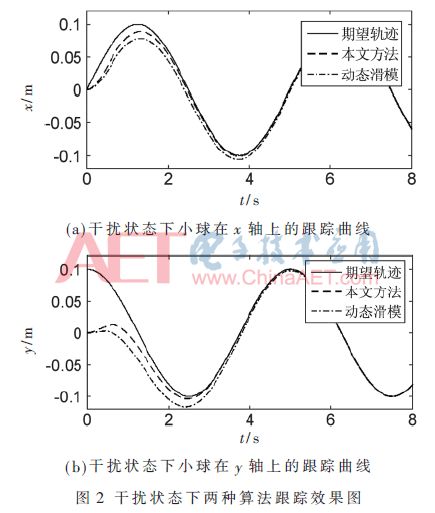
實驗所用期望軌跡跟蹤模型如式(24)所示,該模型起始點設(shè)為(0,0),幅值為0.1 m,在x軸和y軸上分別做正弦、余弦曲線跟蹤。
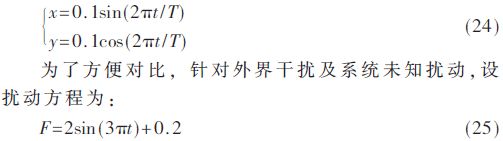
分別考慮本文算法在有擾動和無擾動情況下對期望軌跡的跟蹤性能。在相同的擾動條件下,采用動態(tài)滑模對x軸、y軸及圓形軌跡的期望軌跡進行跟蹤,作為與本文方法的實驗對比。仿真結(jié)果數(shù)據(jù)比較見表3。

3.2 仿真結(jié)果分析
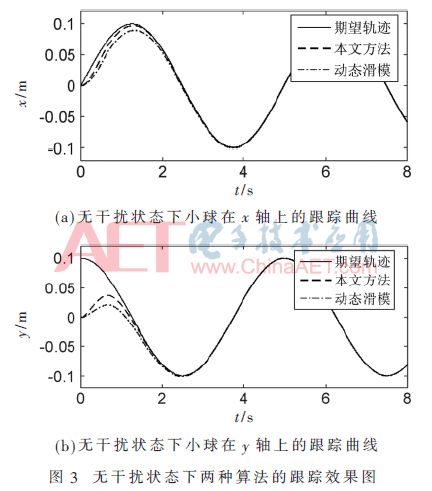
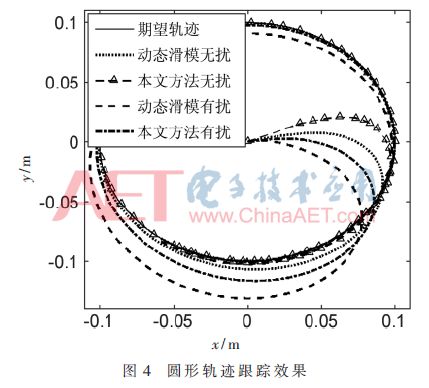
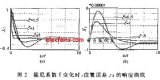
由圖2(a)和圖2(b)仿真結(jié)果可以看出,在受擾情況下,動態(tài)滑模體現(xiàn)出了一定的魯棒性。通過與本文算法相對比,本文算法在加入自適應(yīng)調(diào)整策略干擾上界預(yù)估后,在跟蹤精度和快速性方面具有更好的控制性能。由圖3(a)和圖3(b)可知,在無擾動狀態(tài)下,動態(tài)滑模和本文方法均實現(xiàn)了對期望軌跡的有效追蹤,本文方法快速性較好,在跟蹤精度方面也獲得了有效提升。在圖4中,分別針對不同干擾情況,采用2種算法對圓形軌跡進行跟蹤,通過精度對比可知,本文方法在系統(tǒng)受到外界干擾的情況下,可以有效減弱干擾影響,相比于動態(tài)滑模,在控制精度與快速性方面均獲得提升。
4 結(jié)論
本文以板球系統(tǒng)為對象,針對板球系統(tǒng)在不確定干擾下的軌跡跟蹤精度問題,提出了一種反演自適應(yīng)動態(tài)滑模控制方法。該方法應(yīng)用自適應(yīng)滑模控制算法對干擾邊界進行估計,設(shè)計了新的切換函數(shù),有效解決了傳統(tǒng)滑模的抖振問題,同時提高了系統(tǒng)的響應(yīng)速度,降低了外界干擾的影響,大大增強了系統(tǒng)對自身參數(shù)攝動的非脆弱性,保證了系統(tǒng)在Lyapunov意義下的漸近穩(wěn)定性。通過與動態(tài)滑模方法進行仿真對比,表明了該方法的有效性。下一步的工作重點是結(jié)合群智能算法對控制因子進行調(diào)整,針對兩軸間的耦合誤差做進一步研究。
-
控制器
+關(guān)注
關(guān)注
112文章
16198瀏覽量
177399 -
直流電機
+關(guān)注
關(guān)注
36文章
1708瀏覽量
70076 -
板球系統(tǒng)
+關(guān)注
關(guān)注
1文章
2瀏覽量
2747
原文標(biāo)題:【學(xué)術(shù)論文】板球系統(tǒng)的反演自適應(yīng)動態(tài)滑模控制
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于自適應(yīng)滑模觀測器的PMSM矢量控制
交流伺服系統(tǒng)滑模控制器的動態(tài)設(shè)計
連續(xù)平壓機伺服位置系統(tǒng)自適應(yīng)滑模反步控制_唐文秀
自適應(yīng)系統(tǒng)決策:一種模型驅(qū)動的方法
提出了一種以動態(tài)響應(yīng)一致性為最優(yōu)目標(biāo)的自適應(yīng)控制策略
自適應(yīng)全局快速Terminal滑模控制
PMLSM自適應(yīng)反推滑模控制
如何改進非線性干擾觀測器的機械臂自適應(yīng)反演滑模控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論