 盤點工業機器人的四大新型驅動方式
盤點工業機器人的四大新型驅動方式
工業機器人的傳動
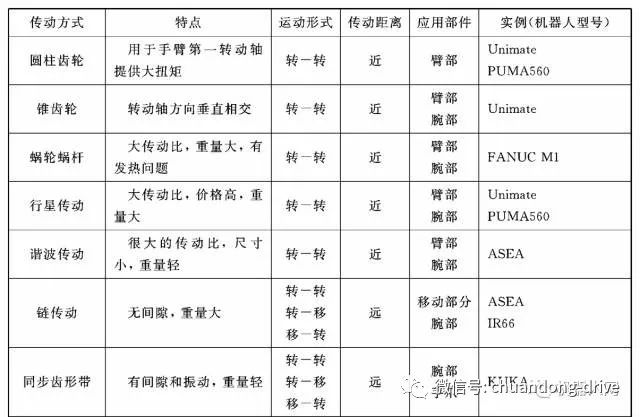
工業機器人的傳動裝置與一般機械的傳動裝置的選用和計算大致相同。 但工業機器人的傳動系統要求結構緊湊、 重量輕、轉動慣量和體積小, 要求消除傳動間隙, 提高其運動和位置精度。工業機器人傳動裝置除齒輪傳動、蝸桿傳動、 鏈傳動和行星齒輪傳動外, 還常用滾珠絲桿、 諧波齒輪、鋼帶、 同步齒形帶和繩輪傳動。
表1工業機器人常用傳動方式的比較與分析
新型的驅動方式
1. 磁致伸縮驅動
鐵磁材料和亞鐵磁材料由于磁化狀態的改變, 其長度和體積都要發生微小的變化, 這種現象稱為磁致伸縮。
20世紀60年代發現某些稀土元素在低溫時磁伸率達3000×10-6~10 000×10-6,人們開始關注研究有適用價值的大磁致伸縮材料。
研究發現,TbFe2(鋱鐵)、SmFe2(釤鐵)、DyFe2(鏑鐵)、 HoFe2(鈥鐵)、TbDyFe2(鋱鏑鐵)等稀土-鐵系化合物不僅磁致伸縮值高, 而且居里點高于室溫, 室溫磁致伸縮值為1000×10-6~2500×10-6, 是傳統磁致伸縮材料如鐵、鎳等的10~100倍。 這類材料被稱為稀土超磁致伸縮材料(Rear Earth Giant MagnetoStrictive Materials, 縮寫為RE-GMSM)。
這一現象已用于制造具有微英寸量級位移能力的直線電機。為使這種驅動器工作, 要將被磁性線圈覆蓋的磁致伸縮小棒的兩端固定在兩個架子上。當磁場改變時, 會導致小棒收縮或伸展, 這樣其中一個架子就會相對于另一個架子產生運動。一個與此類似的概念是用壓電晶體來制造具有毫微英寸量級位移的直線電機。
美國波士頓大學已經研制出了一臺使用壓電微電機驅動的機器人——“機器螞蟻”。“機器螞蟻”的每條腿是長1 mm或不到1 mm的硅桿, 通過不帶傳動裝置的壓電微電機來驅動各條腿運動。這種“機器螞蟻”可用在實驗室中收集放射性的塵埃以及從活著的病人體中收取患病的細胞。
2.形狀記憶金屬
有一種特殊的形狀記憶合金叫做Biometal(生物金屬), 它是一種專利合金, 在達到特定溫度時縮短大約4%。 通過改變合金的成分可以設計合金的轉變溫度, 但標準樣品都將溫度設在90℃左右。
在這個溫度附近, 合金的晶格結構會從馬氏體狀態變化到奧氏體狀態,并因此變短。然而,與許多其他形狀記憶合金不同的是,它變冷時能再次回到馬氏體狀態。如果線材上負載低的話,上述過程能夠持續變化數十萬個循環。
實現這種轉變的常用熱源來自于當電流通過金屬時,金屬因自身的電阻而產生的熱量。結果是,來自電池或者其他電源的電流輕易就能使生物金屬線縮短。
這種線的主要缺點在于它的總應變僅發生在一個很小的溫度范圍內,因此除了在開關情況下以外, 要精確控制它的拉力很困難,同時也很難控制位移。
圖1 形狀記憶金屬制作的末端操作器
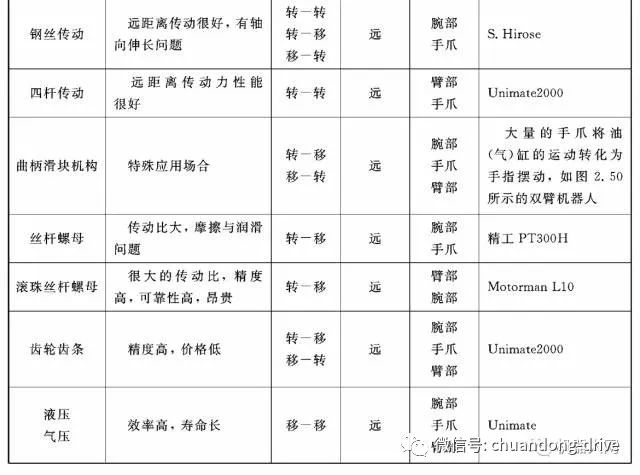
3.靜電驅動器
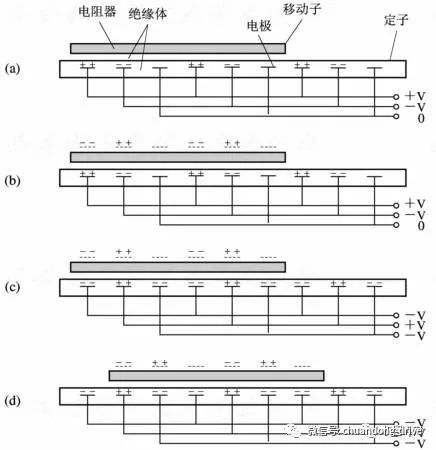
圖2 三相靜電驅動器工作原理
這種執行器有下列特征:
(1) 因為移動子中沒有電極, 所以不必確定與定子的相對位置, 定子電極的間距可以非常小。
(2) 因為驅動時會產生浮力,所以摩擦力小,在停止時由于存在著吸引力和摩擦力, 因此可以獲得比較大的保持力。
(3) 因為構造簡單, 所以可以實現以薄膜為基礎的大面積多層化結構。
基于上述各點, 把這種執行器作為實現人工筋肉的一種方法, 受到了人們的關注。
4.超聲波電機
超聲波電機的工作原理是用超聲波激勵彈性體定子,使其表面形成橢圓運動, 由于其上與轉子(或滑塊)接觸, 在摩擦的作用下轉子獲得推力輸出。如圖2.78所示, 可以認為定子按照角頻率ω0,進行超聲波振動, 在預壓W作用下, 轉子被推動。
超聲波電機的負載特性與DC電機相似, 相對于負載增加, 轉速有垂直下降的趨勢,將超聲波電機與DC電機進行比較, 它的特點有:① 可望達到低速、 高效率; ② 同樣的尺寸, 能得到大的轉矩; ③ 能保持大轉矩; ④ 無電磁噪聲; ⑤ 易控制; ⑤ 外形的自由度大等。
圖3超聲波電機的工作原理圖
驅動傳動方式的應用
1. Movemaster EX RV-M1的驅動傳動
圖4 為三菱裝配機器人Movemaster EX RV-M1的驅動傳動簡圖。
該機器人采用電動方式驅動, 有5個自由度, 分別為腰部旋轉、肩部旋轉、肘部的轉動、手腕的俯仰與翻轉。各關節均由直流伺服電機驅動,其中,腰部旋轉部分與腕關節的翻轉為直接驅動。為了減小慣性矩,肩關節、肘關節和腕關節的俯仰都采用同步帶傳動。實驗室常用的末端操作器(在零件裝配時有開閉動作)采用直流電機驅動。
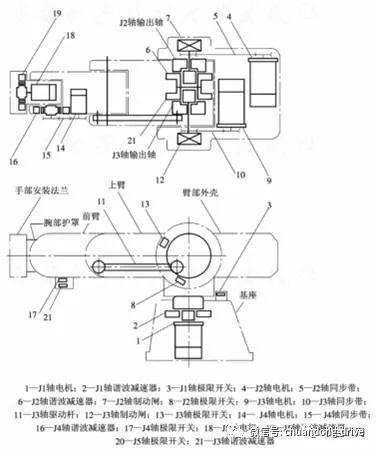
圖4 三菱裝配機器人內部結構簡圖
1)腰部轉動(J1軸)
(1)腰部(J1軸)由基座內的電機①和調諧齒輪②驅動。
(2) J1軸限位(極限)開關③裝在基座頂部。
2)肩部(J2軸)旋轉
(1) 肩部(J2軸)由肩關節處的調諧齒輪⑥驅動, 由連接在J2軸電機④上的同步帶⑤帶動旋轉。
(2) 電磁制動閘⑦裝在調諧齒輪⑥的輸入軸上, 以防止斷電時肩部由于自重而下轉。
(3) J2軸限位開關⑧裝在肩殼內上臂處。
3)肘部伸展(J3軸)
(1) J3軸電機⑨的轉動由同步帶B10傳送至調諧齒輪B21。
(2) 調諧齒輪B21上J3軸輸出軸的轉動由J3軸的驅動連桿傳送至肘部的軸上,從而帶動前臂伸展。
(3) 電磁制動閘B12裝在調諧齒輪B21的輸入軸上。
(4) J3軸限位開關B13安裝在肩殼內上臂處。
4)腕部俯仰(J4軸)
(1) J4軸的電機B14安裝在前臂內。J4軸同步帶B15將該電機的轉動傳送到調諧齒輪B16上,從而帶動腕殼旋轉。
(2) J4軸的限位開關B17安裝在前臂下側。
5)腕部轉動(J5軸)
(1) J5軸電機B18和J5軸調諧齒輪B19安裝在腕殼內的同一軸上, 由它們帶動手爪安裝法蘭旋轉。
(2) J5軸的限位開關B20安裝在前臂下。
2. PUMA 562機器人傳動
PUMA 562機器人有6個自由度, 其傳動方式如圖5所示。由圖可看出:
電機1通過兩對齒輪Z1、Z2、Z3、Z4傳動帶動立柱回轉。
電機2通過聯軸器、 一對圓錐齒輪Z5、Z6和一對圓柱齒輪Z7、Z8帶動齒輪Z9, 齒輪Z9繞與立柱固聯的齒輪Z10轉動, 于是形成了大臂相對于立柱的回轉。
電機3通過兩個聯軸器和一對圓錐齒輪Z1、Z2、 兩對圓柱齒輪Z13、Z14,Z15、Z16(Z16固聯于小臂上)驅動小臂相對于大臂回轉。
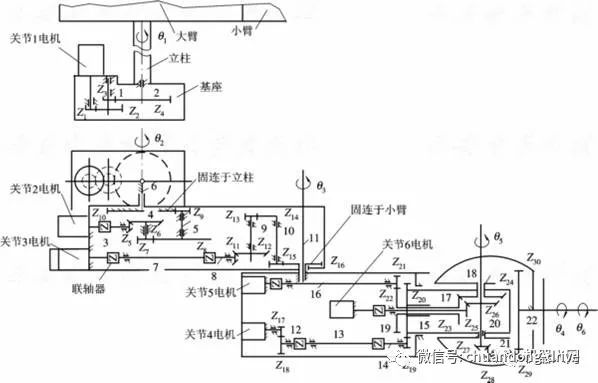
圖5 PUMA 562機器人的傳動示意圖
電機4先通過一對圓柱齒輪Z17、 Z18、 兩個聯軸器和另一對圓柱齒輪Z19、Z20(Z20固聯于手腕的套筒上)驅動手腕相對于小臂回轉。
電機5通過聯軸器、 一對圓柱齒輪Z21、Z22、一對圓錐齒輪Z23、Z24(Z24固聯于手腕的球殼上)驅動手腕相對于小臂(亦即相對于手腕的套筒)擺動。
電機6通過聯軸器、 兩對圓錐齒輪Z25、Z26,Z27、Z28和一對圓柱齒輪Z29、Z30驅動機器人的機械接口(法蘭盤)相對于手腕的球殼回轉。
-
驅動器
+關注
關注
52文章
8168瀏覽量
146053 -
工業機器人
+關注
關注
91文章
3353瀏覽量
92569
原文標題:必看!工業機器人四大新型的驅動方式
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論