 CMOS圖像傳感器技術及SOI在近紅外CMOS圖像傳感器中的應用
CMOS圖像傳感器技術及SOI在近紅外CMOS圖像傳感器中的應用
一. 3D成像和傳感市場
早期的3D成像和傳感技術主要應用于傳統的醫療和工業領域,但市場規模很小,數年來一直維持在1億美元以下。隨著近年來技術不斷取得突破,3D成像和傳感技術已經開始進軍消費電子和汽車電子領域,未來將迎來爆發式的增長。
據最新預計(圖1),3D成像與傳感的全球市場規模將從2017年的21億美元擴大至2023年的185億美元,年復合增長率達到44%。在2017年iPhone X Face ID采用了3D像機的觸發下,未來消費類3D成像和傳感市場將持續成為增長最快、規模最大的領域:從2017至2023年,消費類3D成像和傳感市場的年復合增長率將達到82%,到2023年的市占比將超過七成(圖2)。
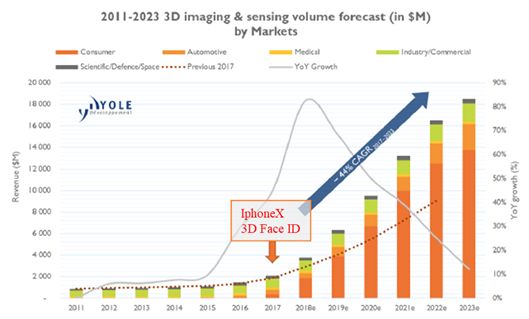
圖1 2011~2023年3D成像和傳感市場預測
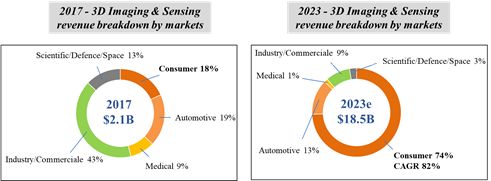
圖2 2017年和2023年3D成像和傳感細分市場占比
目前在移動消費市場,全球已經建立了完善的3D成像產業鏈(圖3)。由于技術領先,蘋果及其聯盟公司目前牢牢把控3D成像技術,預計Android陣營大規模普及3D成像可能要到2019年。屆時一旦Android智能手機的替代供應鏈就位,3D成像的市場的體量將快速增大。
在中國,諸多手機制造商已經開始布局3D成像技術:小米8探索版中搭載了3D人臉識別技術;OPPO和華為預計今年下半年相關機型也將會搭載3D傳感器。雖然中國在手機應用端已經在全球率先切入3D成像,但是3D成像供應鏈基本都是海外公司,國內供應鏈缺失。由于技術壁壘較高,未來中國廠商很難打進3D成像的供應鏈。
圖3 2018~2023年全球移動消費類3D成像生態鏈
二. CMOS圖像傳感器技術及SOI在近紅外CMOS圖像傳感器中的應用
2.1 3D成像技術簡介
現階段,3D成像技術有三條主流技術路線:結構光(Structured light)、飛行時間(TOF,Time of Flight)和雙目視覺技術(Stereo Vision)。下面對這三種技術作簡要介紹。
1)雙目測距。雙目測距原理(圖4(a))類似人的雙眼,在自然光下通過兩個相機抓取圖像,然后通過三角形原理來計算并獲得深度信息。目前的雙攝就是雙目測距的典型應用。
2)結構光。結構光技術(圖4(b))主要是通過近紅外激光器發射的具有一定結構特征的光線,投射到被拍攝物體上,再由專門的紅外相機進行采集,采集后生成的圖像相對原始光線結構發生變化,然后通過運算單元將這種結構的變化換算成深度信息,進而復原整個三維空間。
3)TOF。TOF成像原理(圖4(c))是發射一束經過相位調制的紅外激光到被測物體,當紅外激光被反射回相機時,會因為光飛行時間的延遲,導致相位與發射時的相位有微小的變化,通過計算相位的變化,就可以計算出被測物體到相機之間的距離。
圖4 3D成像。(a)雙目測距,(b)結構光,(c)TOF。
圖5 3種3D成像技術比較
比較這三種3D成像技術(圖5):雙目立體成像抗環境光干擾強,分辨率高,但整體系統的復雜性、高功耗、不理想的暗光環境表現,以及低精度給其應用帶來較大的局限性。聯想曾在Phab2 ProAR手機上嘗試類似的方案,但體驗并不樂觀;TOF技術基本不需要使用光學棱鏡,抗干擾性能好,視角更寬,不足是深度圖像分辨率較低,功耗較大。業內普遍認為ToF適用于消費電子產品的后置3D成像,用于遠具體、室外強干擾環境;結構光技術的優勢在于技術成熟,功耗低,深度圖像分辨率比較高,但是極易受到外界光的干擾、識別距離近,適合于消費電子產品前置3D成像,用于近距離場景。
從廠商的站隊以及產品影響力來看,結構光技術是最主流的3D成像實現方法。采用結構光技術路線代表公司有蘋果、微軟、Intel、Google等。
2.2 iphoneX的3D成像技術
蘋果早在2011年就開始布局3D成像領域(表1),特別是在2013年,蘋果以3.45億美元收購了以色列的3D視覺公司PrimeSense,這項收購是蘋果史上最大手筆的收購之一。PrimeSense是結構光方案最主要的專利持有者,因此,iphoneX中的3D成像采用的推測是結構光技術。iPhoneX的TrueDepth通過結構光技術實現面部解鎖,容錯率可達百萬分之一,安全性能良好。另外,由于借助不可見的紅外光,TrueDepth還支持在黑夜等暗光環境下使用。

表1蘋果近幾年收購的3D成像技術公司
TrueDepth 3D相機除了能夠獲取平面圖像以外,還可以獲得拍攝對象的深度信息,即三維的位置及尺寸信息,其通常由多個相機+深度傳感器組成,硬件復雜度較高,因此,iPhoneX在正面屏幕頂部開了個“齊劉海”(圖6)。
TrueDepth是一款集成了五個子模塊的復雜組合體(圖6)。這五個子模塊分別是:近紅外相機(STM提供)、TOF測距傳感器+紅外泛光照明器(STM提供)、RGB相機(LG Innotek提供模組,索尼提供圖像傳感器)、點陣式投影器(ams提供)和彩色/環境光傳感器(ams提供),該3D相機模組使用柱形凸塊連接近圖像傳感器以及包括四個透鏡的光學模塊。
iPhoneX實際進行人臉識別的過程非常復雜,不過可以簡化成以下幾個步驟。
1)檢測物體靠近。當人臉靠近時,首先工作的是距離感應器,它將會告訴iPhoneX是否有物體靠近;2)檢測用戶臉部。泛光感應元件采用垂直腔面發射激光器(VCSEL)對前方物體進行掃描,由紅外鏡頭接收信息,并傳給A11芯片神經網絡系統進行判斷,識別為臉部后再進行下一步操作;3)獲取3D人臉信息。點陣投影器(結構光發射器)通過將30000多個肉眼不可見的近紅外光點投影在人的臉部,繪制成獨一無二的面譜;4)結構光接收。紅外鏡頭則讀取點陣圖案,捕捉它的紅外圖像,為用戶人臉繪制精確細致的深度圖,然后將數據發送至A11以確認是否匹配,匹配度滿足蘋果設置的要求后手機就能實現解鎖。
圖6 iPhoneX“齊劉海”結構(上圖)和所采用的3D成像模組(下圖)
與傳統相機硬件產業鏈相比,iPhoneX 3D相機產業鏈新增加了“紅外光源+光學組件+紅外傳感器”等部分,其中紅外CMOS傳感器是核心器件,價格昂貴(表2)。iPhoneX紅外CMOS傳感器采用的是STM基于SOI技術的解決方案,接下來將重點解析。

表2 蘋果3D傳感零部件及價格細分
2.3 CMOS圖像傳感器技術路線
傳統的CMOS圖像傳感器是在體硅上實現的,其靈敏度和分辨率主要采用兩個關鍵指標衡量:1)量子效率(QE)。量子效率代表其捕獲的光子與轉化為電子的光子的比率,量子效率越高,圖像越亮;2)模傳遞函數(MTF)。模傳遞函數代表輸出像與輸入像的對比度之比,模傳遞函數越高,圖像越清晰。模傳遞函數主要受到像素間各種串擾(圖7)的影響,因此也可以用串擾來評估模傳遞函數的高低。因此,設計高品質的CMOS圖像傳感器的要點有兩個,一方面要提高量子效率,另一方面要降低串擾。下面介紹幾種主流的隔離解決方案(圖8)。
圖7 體硅襯底上CMOS圖像傳感器的各種串擾示意圖
首先第一種解決方案如圖8(B)所示,采用不同劑量的P+對每個像素進行側壁注入(SWI),注入后在像素兩側形成側壁,可以鈍化硅懸空鍵,減小光電二極管的暗電流,從而提高了光電轉換效率。經過P+鈍化后的像素的量子效率可以提高20%之多。
第二種解決方案(圖8(C))是在n型硅襯底上制備釘扎深二極管(pinned deep diode)。這種方法是利用多重注入在像素內形成結電容隔離墻,可以降低像素間的串擾并且有效調控光生載流子的漂移。與傳統二極管相比,深二極管在藍色光譜中量子效率增加到60%,綠色光譜增加到超過50%。
圖8 體硅襯底上不同的像素隔離架構
第三種解決方案是采用深槽隔離(DTI)結構進行隔離(圖8(D))。DTI的機制如下(圖9):Si-SiO2界面可用作隔離墻阻止電子擴散,降低串擾;Si-SiO2組成了類波導結構,將光線限制在硅中,實現了光學隔離,并且延長光在硅中的光程,提高量子效率、降低串擾。與前兩種解決方案相比,DTI結構的隔離效果最為顯著(圖10)。另外,溝槽越深,DTI的隔離性越好,串擾越小。由圖11結果知,DIT的深度一般要超過4μm。
圖9 DTI結構抑制串擾、增加光程的機制
圖10 (a)不同隔離方案量子效率比較,(b)P+注入和DTI隔離后像素的光學特性比較
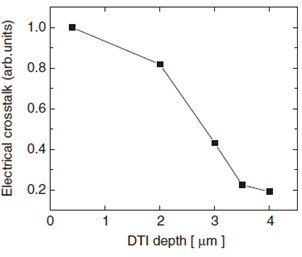
圖11 串擾和DTI深度的關系
綜上,采用DTI隔離技術在體硅上制備的CMOS傳感器的靈敏度和分辨率最高,目前STM、三星具備采用DTI隔離技術制備CMOS傳感器的能力。
2.4 iPhoneX的近紅外圖像傳感器架構:DTI + SOI襯底
iphoneX中的近紅外CMOS傳感器是由蘋果和STM聯合開發的,器件的截面圖如圖12所示。
下面對該結構像素隔離的方案進行解析:首先,iphoneX采用了DTI隔離技術;另外,與2.3節介紹的體硅隔離不同,iphoneX采用的是SOI襯底。根據圖8和圖12,推測SOI襯底上近紅外圖像傳感器的采用了DTI 與SOI襯底相結合的隔離架構(圖13),該架構的特點是DTI結合SOI襯底的BOX層能夠實像素的全隔離:通過DTI隔離像素間的光學和電學串擾;通過BOX隔離來自襯底的噪聲,隔離金屬污染;DTI和BOX形成了全反射腔,大大增加了有效光程,光捕獲能力增大。因此,該架構能夠提高量子效率、減少串擾,從而大幅提高了近紅外傳感器的靈敏度和分辨率。
圖12 iPhoneX中近紅外CMOS圖像傳感器的截面圖
圖13 SOI襯底上近紅外圖像傳感器的結構和原理圖
另外,BOX層上外延硅的厚度是由近紅外光在硅中的穿透深度決定的。為了保證感應能力和避免太陽光的干,近紅外圖像傳感器采用的一般是近紅外短波,波長范圍在780~1100nm之間,這個波段的近紅外線在硅中的吸收深度﹥6μm(圖14),從圖(12)中知,iPhoneX中圖像傳感器硅外延層的厚度約6.1μm。在全反射腔的作用下,近紅外線的吸收深度﹥6μm,滿足應用需求。
圖14 不同電磁波在硅中的穿透深度
經分析,iphoneX的近紅外圖像傳感器對SOI襯底沒有特殊要求,推測采用的是常規PD-SOI襯底,目前該襯底主要由Soitec公司提供。Soitec將面向傳感器應用的SOI襯底稱為Imager-SOI,產品規格為:晶圓尺寸是300mm,BOX厚度在15~150nm之間,頂層硅厚度在50~200nm之間。Soitec從2016年開始給STM供貨Imager-SOI,隨后產能不斷增加。Soitec計劃到2020年Imager-SOI的晶圓出貨量5萬片(圖15)。
圖15 Soitec Imager-SOI晶圓年出貨量估計(單位:千片)
三. 總結
蘋果實現了3D Face ID,同時也再次“解鎖”了3D成像和傳感技術。未來3D成像和傳感技術將會滲透到更多的應用場景,其市場將會持續高速膨脹。SOI CMOS傳感器技術已經在智能手機占得先機,被蘋果證明在結構光3D成像中具有獨特的優勢,未來如果能夠降低成本并打入Android陣營,則市場前景光明。
-
傳感器
+關注
關注
2541文章
49961瀏覽量
747478 -
CMOS
+關注
關注
58文章
5621瀏覽量
234494 -
3D成像
+關注
關注
0文章
97瀏覽量
16012
原文標題:3D成像和傳感市場及SOI技術在近紅外CMOS圖像傳感器中的應用簡析
文章出處:【微信號:sensors-iot,微信公眾號:sensors-iot】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CMOS圖像傳感器電路設計
IBM將提供CMOS圖像傳感器代工服務
CMOS有源像素傳感器的圖像質量怎么提高?
cmos圖像傳感器的應用
CMOS圖像傳感器的原理參數和CCD圖像傳感器有什么區別等資料概述





 工商網監
工商網監
評論