 基于單神經元的PID控制實現
基于單神經元的PID控制實現
介紹了一種單神經元自適應控制的方法,并提出了在線調整的方法。該方法結構簡單,便于在分散控制系統中實現。
0 引言
在工業過程控制中,PID控制是歷史最悠久、生命力最強的控制方式。這主要是因為這種控制方式具有直觀、實現簡單和魯棒性能好等一系列優點。在火電廠分散控制系統中,單輸入單輸出(SISO)、采用PID控制規律、簡單的控制回路一般占80%以上。但是,許多熱工對象都具有大時延、大慣性的特性,使得過渡過程時間變長,調節品質變差;另外,對于高階或多變量強耦合過程,PID的整定與控制都存在困難。由于整定條件常常受到限制,以及對象的動態特性隨著工況、環境等變化而發生變化,PID參數往往難以達到最優狀態。
為此,本文提出一種單神經元自適應控制的方法。通過大量的仿真實驗表明,該方法簡單易行,具有比普通PID算法好得多的控制效果。
1基于單神經元的自適應控制
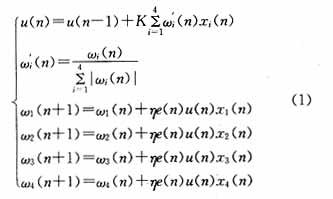
神經元的輸入信號由4部分組成:前饋控制信號x1(t)、反饋比例控制信號x2(t)、反饋微分控制 信號x3(t)、反饋積分控制信號x4(t)。它是一種多層次多模式的控制結構,集前饋和反饋于一體,互為關聯,互為補償。前饋控制信號x1(t)通過ω′1(t) 直接作用于受控對象,加快了系統的響應速度;x2(t)能迅速減小跟蹤誤差;x3(t) 可以改善系統的響應速度,減小超調量;x4(t) 使系統趨近于穩態無差,提高了控制的準確性。權值ω′i(t)(i=1,2,3,4)反映了受控對象和過程的動態特性,神經元通過自身的學習策略不停地調整ω′i(t)(i=1,2,3,4),在4種控制的關聯作用下迅速消除偏差,進入穩態。
權值調整方法采用有監督Hebb學習算法[2],同時為了保證學習算法的收斂性和控制的魯棒性,可采用規范化的學習算法。控制算法如下式:
2仿真實驗研究
進行單神經元自適應控制仿真實驗,實驗結果見圖2。PID的參數Ti、δ和Td是通過尋優得到的最優參數。在t=0.56 s時加了一個內擾。可見單神經元自適應控制比普通PID控制響應速度快,控制效果好。
大量的仿真實驗表明,單純調節學習速率η對控制效果的影響不明顯。K是神經元的比例系數,它對開環放大倍數較大的受控對象,可以起到衰減神經元控制效果、消除學習過程的沖擊的作用;而對開環放大倍數較小的受控對象,則可以起到增強神經元控制效果、保證神經元在全局范圍內搜索到E{[r(t)-y(t)]2} 的最小值的作用。仿真實驗表明,K取的較大時,系統動態啟動快,但超調量大,調整時間長;K取的較小時,系統響應變慢,超調量下降,但如果K取的太小,則響應跟蹤不上給定信號。
對K的分析表明,應當在響應初期取較大的值,以提高響應速度;而在進入穩態以后,K應逐步減少到某一穩定值,以保證系統不出現過大的超調量。為了滿足上述要求,可以采用非線性變換法對K進行在線修改,調整公式如下:

式中,K0為K的穩態值;α為待定參數,其值視控制效果進行調整。取偏差的3次方是使偏差較大時K較大,增加響應速度,而偏差較小時,后一項幾乎不起作用,以減小超調量。
也可以采用如下簡單的分段線性化方法來調整K:

對無自平衡對象G(s)=(0.325s+1)-1×(0.5s+1)-1 進行單神經元自適應控制仿真實驗,實驗結果見圖3。在t=5.6 s時加一個內擾。可見控制的響應速度進一步加快。
3結論
以上提出的神經元自適應預測PID控制器,能夠提高控制系統的自適應能力和魯棒性,該控制器結構簡單,易于實現,特別是便于在分散控制系統中實現。
-
PID控制
+關注
關注
10文章
460瀏覽量
40040 -
神經元
+關注
關注
1文章
363瀏覽量
18438
發布評論請先 登錄
相關推薦
神經元芯片的主要特點和優勢
神經元是什么?神經元在神經系統中的作用





 工商網監
工商網監
評論