") 進行對無刷電機控制器ML4425/4426的介紹并運用
進行對無刷電機控制器ML4425/4426的介紹并運用
ML4425/4426是MicroLinear公司推出的一種智能型無刷電機控制器專用電路。該電路能提供起動和控制Δ和Y繞組、無刷電機的速度、換向所需的所有功能。文中介紹了ML4425/4426的特點、引腳功能、運行原理以及典型應(yīng)用電路,并給出了一個完整的高電壓電機的驅(qū)動電路。
無刷電機控制器原理
1 功能特點
ML4425/4426是Micro Linear公司推出的智能型無刷電機專用控制器,可用于為三相無刷電機提供封閉回路的換向控制信號,同時利用PWM模式還可對電機速度進行控制并對電機進行必要的保護。ML4425/4426的特點如下:
●可進行簡單的變速控制;
●所有重要電流均由一個單獨的外接電阻器決定,設(shè)置比較簡單;
●電機起動和停止可以利用電路的電源完成;
●起動定時序列由兩個電容器完成;
●可獨立運行控制功能,且外圍電路簡單;
●采用了新的反電勢換向技術(shù),能提供最小的無抖動轉(zhuǎn)矩;
●可進行最大效率的PW控制;
●具有換和PLC,可有效抑制PWM尖峰噪聲信號。
無刷電機控制器
2 引腳功能
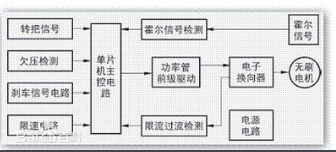
ML4425/4426由壓控振蕩器(VCO),PWM速度控制器、高端柵極驅(qū)動器、低端柵極驅(qū)動器、PWM電流控制器、換向控制器、反饋取樣電路以及電源顯示等部分構(gòu)成。
ML4425/4426采用28腳SOIC和32腳TQFP兩種封裝形式,為28腳SOIC封裝的引腳排列,各引腳的功能說明如下:
腳1:(ISENSE):電機電流感應(yīng)輸入端。此腳接大約0.5V信號時,可產(chǎn)生ILIMIT。
腳2~4(P1~P3):分別用于驅(qū)動外部P通道功率器件以驅(qū)動電機PH1、PH2、PH3。
腳5(RCPWM):內(nèi)部gn放大器外接阻容網(wǎng)絡(luò)連接端。此腳連接的阻容元件與其他部件一起決定速度回路的零極點。
腳6(Cosc):PWM振蕩器定時電容連接端。此端所連電容器決定PWM振蕩器的頻率。使用1nF電容時,PWM振蕩器的振蕩頻率約為25kHz。
腳7(VREF):參考電壓輸出端,用于為速度設(shè)計提供參考。
腳8(VSPEED):速度控制輸入端。此端的電壓可用于控制速度回路中的放大器,以達到控制電機速度的目的。
腳9~(N1~N3):驅(qū)動輸出。分別用于驅(qū)動外部三個N溝道MOSFET功率器件以驅(qū)動電機的PH1、PH2、PH3。
腳12(ILIMIT):ISENSE閾值控制端。改變此端電壓可降低內(nèi)部的閾值設(shè)置電壓。
腳13(VCO):壓控振蕩器輸出端。
腳14(Vcc):電源。
腳15(CCVO):VCO定時電容連接端。
腳16(RVCO):VCO電流設(shè)置端。使用時應(yīng)外接一電阻(一般RVCO取80kΩ)。
腳17(CRST):復(fù)位端。此腳為地電位時,器件處于復(fù)位狀態(tài)。
腳18(VFLT):電源狀態(tài)顯示輸出。此腳為“0”時,表示電源處于低電平;為“1”時,表示電源處于高電壓狀態(tài)。
腳19(CEN):斜波保持電容連接端。
腳20(RCVCO):VCO回路濾波器件接入端。應(yīng)用時此腳外接阻容元件。
腳21(CRAMP):斜升速度給定電容連接端。
腳22~24(PH1~PH3):三個電機端點的連接端。
腳25(BTAKE):制動狀態(tài)控制端。此腳為“0”電位時,電機處于制動狀態(tài)。
腳26(Cos):外部電容連接端。
腳27(RREF):多電流設(shè)定電阻連接端。所有重要電流的設(shè)定均由此端所連的電阻決定。
腳28(GND):信號及功率公共地。
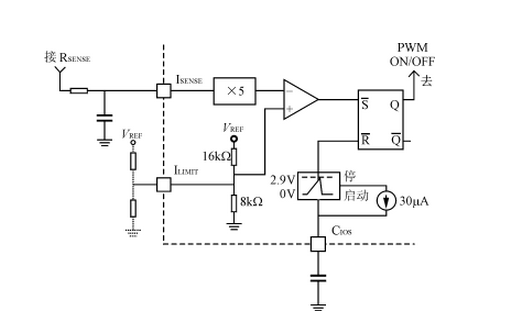
3 工作原理
ML4425/4426無刷電機控制器的內(nèi)部結(jié)構(gòu)及運行原理圖。下面從起動、運行、制動等三個方面對LM4425/4426的工作原理進行說明。
工作原理圖
3.1 起動
一般電機的起動分校準、斜升、運轉(zhuǎn)幾個階段。校準是為了使電機處于復(fù)位狀態(tài)。
當ML4425/4426的17腳電位達到1.5V時,CEN腳開始充電。此時,ML4425/4426將以0.5μA的電流向RCVCO充電,這使得VCO的頻率開始斜升,直到CEN引腳達到1.5V為止。這一過程稱為斜升。
在器件的CEN電位斜升到1.5V后,設(shè)備即使用電機的BEMF并開始閉環(huán)運行。
3.2 運行
當CEN(腳19)電位超過1.5V時,電機進入運行模式。此時電機速度應(yīng)高到足以產(chǎn)生可探測到的BEMF,并允許閉環(huán)回路運行開始。
當RCVCO(腳20)上的電位小于VSPEED(腳8)電位時,電機將繼續(xù)加速。在此期間,電機將受到由ILIMIT限制的N型通道的驅(qū)動。當RCVCO(腳20)的電位接近VSPEED(腳8)電位時,CPWM開始充電,并通過在Cosc(腳6)產(chǎn)生的25kHz的PWM鋸齒波設(shè)定一個補償電平,以控制通向N型通道的功率驅(qū)動器。
3.3 制動
當25腳(制動引腳)電位被拉低時,后有三個N通道驅(qū)動管都被接通,三個P通道驅(qū)動管都被切斷,這樣即可實現(xiàn)制動功能。
4 應(yīng)用
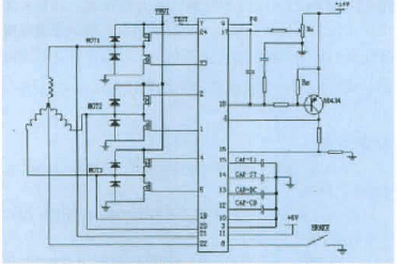
4.1 典型電路
ML4425/4426的典型外圍元件的連接方法亦可參見圖2所示。對不同的使用,有些外圍元件的值應(yīng)作相應(yīng)調(diào)整。
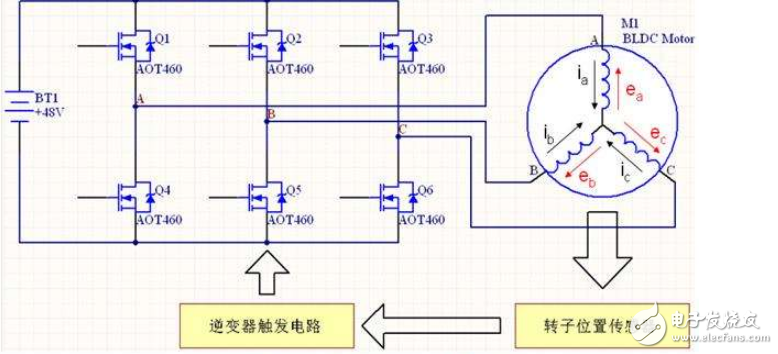
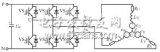
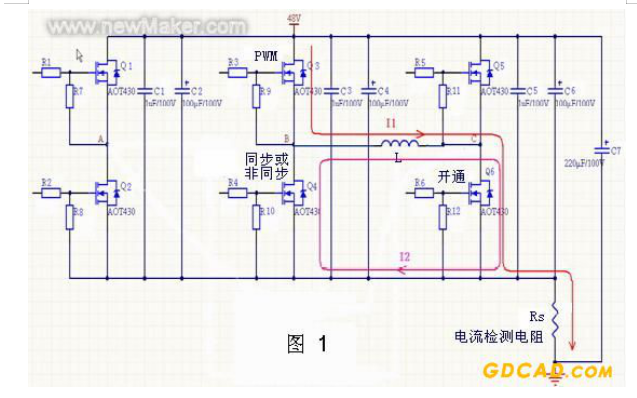
4.2 高電壓電機驅(qū)動電路
以ML4425/4426為核心構(gòu)成的驅(qū)動高電壓電機的實際電路。該電路中外接的功率驅(qū)動電路由六只大功率MOS場效應(yīng)管和三塊IR2118前級驅(qū)動芯片組成,該電路可以驅(qū)動電機的正轉(zhuǎn)、反轉(zhuǎn)和制動等。電路中沒有使用霍爾傳感器,而是用R13~R15的電壓降作為信號反饋(這是該電路的特殊點)來控制電機恒速運轉(zhuǎn)。調(diào)節(jié)R20可以改變電機的運轉(zhuǎn)速度。S1為正、反轉(zhuǎn)控制開關(guān),S2為起動/制動控制開關(guān)。
如果驅(qū)動較低電壓的電機(如24~80V),則可將三塊IR2118省去而直接由六只大功率MOSFET來驅(qū)動,這樣可以降低電路成本。
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177481 -
無刷電機
+關(guān)注
關(guān)注
57文章
827瀏覽量
45768
發(fā)布評論請先 登錄
相關(guān)推薦
無傳感器的直流無刷電機控制器ML4435及其應(yīng)用
基于ML4425的無人機設(shè)計項目
無傳感器的直流無刷電機控制器ML4425及其應(yīng)用(2)
無傳感器的直流無刷電機控制器ML4425及其應(yīng)用(1)
無傳感器的直流無刷電機控制器ML4435及其應(yīng)用
實用無刷直流光伏水泵控制器實現(xiàn)
無刷電機控制器ML4425-_LM4426的應(yīng)用
電動車無刷電機原理圖_電動車無刷電機控制器驅(qū)動電路圖

ML4425對無位置傳感器電機驅(qū)動的注意事項
簡要說明ML4425的工作原理
無刷電機控制器的熱設(shè)計介紹和MOSFET功率損耗的計算詳細說明
直流無刷電機控制器程序流程圖






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論