") 采用模糊控制算法實(shí)現(xiàn)TSC無功補(bǔ)償?shù)目刂圃O(shè)計(jì)
采用模糊控制算法實(shí)現(xiàn)TSC無功補(bǔ)償?shù)目刂圃O(shè)計(jì)
1 引言
在電力系統(tǒng)中,異步電動(dòng)機(jī)和變壓器等設(shè)備要消耗大量的無功功率。這些無功功率如果 不能及時(shí)地得到補(bǔ)償?shù)脑挘瑫?huì)對(duì)電網(wǎng)的安全、穩(wěn)定運(yùn)行產(chǎn)生不利影響。提高電網(wǎng)功率因數(shù), 確保供電質(zhì)量和電網(wǎng)運(yùn)行的經(jīng)濟(jì)性具有重要的現(xiàn)實(shí)意義。
晶閘管投切電容器(thyristor switched capacitor,TSC)是一種并聯(lián)的晶閘管投切的電 容器,通過對(duì)晶閘管閥進(jìn)行全導(dǎo)通或全關(guān)斷控制,可階梯式改變其等效容抗。它通常由多個(gè) 并聯(lián)的電容器支路組成,每個(gè)支路都由設(shè)有觸發(fā)角控制的晶閘管閥來投切,從而達(dá)到階梯式 改變注入系統(tǒng)無功功率的目的。對(duì)TSC 的控制策略[2-3],目前工程上廣泛采用的是九區(qū)圖控 制法[4],該方法沒有考慮電壓與無功的相互影響,控制方法比較簡(jiǎn)單粗糙,存在控制性能不 好,投切振蕩等問題。
2 TSC 的基本原理
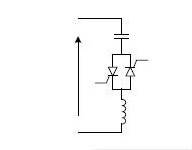
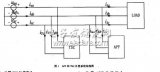
單相的TSC 的基本結(jié)構(gòu)如圖1 所示,它由電容器、雙向?qū)ňчl管(或反并聯(lián)晶閘管) 和阻抗值很小的限流電抗器組成。限流電抗器的主要作用是限制晶閘管閥由于誤操作引起的 浪涌電流,而這種誤操作往往是由于誤控制導(dǎo)致電容器在不適當(dāng)?shù)臅r(shí)機(jī)進(jìn)行投入引起的。同 時(shí),限流電抗器與電容器通過參數(shù)搭配可以避免與交流系統(tǒng)電抗在某些特定頻率上發(fā)生諧 振。TSC 有兩個(gè)工作狀態(tài),即投入和斷開狀態(tài)。投入狀態(tài)下,雙向晶閘管(或反并聯(lián)晶閘 管)導(dǎo)通,電容器(組)起作用,TSC 發(fā)出容性無功功率;斷開狀態(tài)下,雙向晶閘管(或 反并聯(lián)晶閘管)阻斷,TSC 支路不起作用,不輸出無功功率。在工程實(shí)際中,一般將電容 器分成幾組,每組都可由晶閘管投切。這樣可根據(jù)電網(wǎng)的無功需求投切這些電容器,TSC 實(shí)際上就是斷續(xù)可調(diào)的發(fā)出容性無功功率的動(dòng)態(tài)無功補(bǔ)償器。
3 九區(qū)圖控制法原理及缺點(diǎn)
傳統(tǒng)的無功補(bǔ)償九區(qū)圖控制法如圖 2 所示:
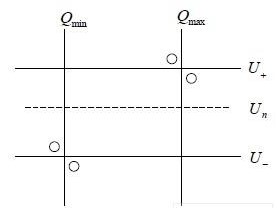
九區(qū)圖控制原理存在的問題主要是:控制策略是基于固定的電壓無功上下限而未考慮無 功調(diào)節(jié)對(duì)電壓的影響及其相互協(xié)調(diào)的關(guān)系;用于運(yùn)算分析的信息有分散性、隨機(jī)性的特點(diǎn), 造成了控制策略的盲目和不確定性,實(shí)際表現(xiàn)為設(shè)備頻繁調(diào)節(jié)。當(dāng)系統(tǒng)運(yùn)行于第7 區(qū)的運(yùn)行 點(diǎn)①時(shí),無功合格、電壓偏低,這時(shí)應(yīng)該是調(diào)節(jié)變壓器分接頭,使電壓升高。可是電壓和無 功是相互影響的,電壓升高,功率因數(shù)會(huì)變大,這時(shí)運(yùn)行點(diǎn)有可能進(jìn)入1 區(qū)在②點(diǎn)運(yùn)行。此 時(shí),電壓合格、無功越下限,應(yīng)該切電容,如果這時(shí)己經(jīng)沒有電容器可切除則降低電壓,這 樣又會(huì)影響電網(wǎng)中的無功功率,有可能使運(yùn)行點(diǎn)回到①點(diǎn)。因此會(huì)造成升壓→降壓→升壓→ 降壓……,這樣的操作指令,使運(yùn)行點(diǎn)在1 區(qū)和7 區(qū)之間來回振蕩。另外,相似的情況在運(yùn) 行點(diǎn)③和④之間也存在。
4 模糊控制策略
4.1 模糊控制器的結(jié)構(gòu)
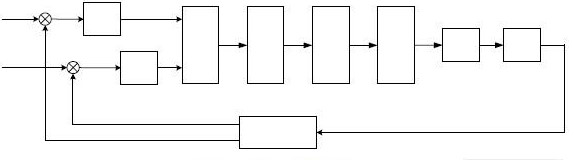
本文采用的模糊控制器[5]的結(jié)構(gòu)如圖3 所示,選擇電壓偏差△U 及無功偏差△Q 作為模 糊控制器的輸入變量,選擇無功功率的補(bǔ)償量△C 作為模糊控制器的輸出變量,從而構(gòu)成2 輸入單輸出的模糊控制系統(tǒng)。
4.2 輸入∕輸出變量模糊化
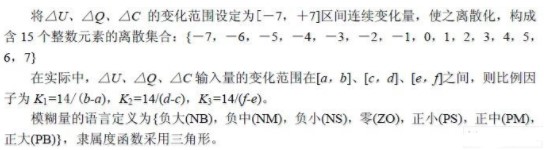
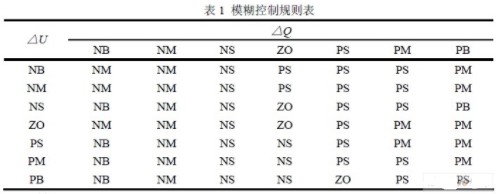
4.3 模糊控制規(guī)則
模糊控制規(guī)則可以用如下模糊語句的形式來描述:
結(jié)合實(shí)際工作人員的經(jīng)驗(yàn),可以得到模糊控制器的控制規(guī)則表,如表1 所示。
4.4 模糊推理
確定了模糊推理系統(tǒng)的模糊輸入變量,輸入變量的隸屬度函數(shù)和控制規(guī)則,就可以對(duì)模 糊推理系統(tǒng)進(jìn)行模糊推理。本文采用Mamdani 推理法。Mamdani 推理法是一種在模糊控制 中普遍使用的方法,在本質(zhì)上是一種合成推理方法。Mamdani 模糊蘊(yùn)含關(guān)系A(chǔ)→B 用A 和B 的直積表示,即有:A→B=A×B,即R(u,v)=A(u)∧B(v)。

4.5 解模糊
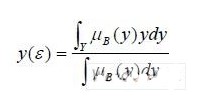
在得到模糊關(guān)系矩陣之后,將輸入變量的向量和關(guān)系矩陣運(yùn)算,可以得到輸出量的模糊 子集。將輸出量的向量通過非模糊的方法,可以計(jì)算出輸出量模糊論域中的一個(gè)值,建立控 制表。本文采用了重力中心法對(duì)被控量進(jìn)行解模糊。其計(jì)算方法為:
5 仿真及分析
利用MATLAB 里的模糊邏輯工具箱[6],按上述步驟建立一個(gè)模糊推理系統(tǒng),并使用 simulink 建立一個(gè)系統(tǒng)仿真模型。用兩個(gè)隨機(jī)信號(hào)(Random Number)來模擬模糊控制器的 兩個(gè)輸入變量電壓偏差△U 及無功偏差△Q,其輸出為電容器組的投切數(shù)量。仿真波形如圖 4 所示。
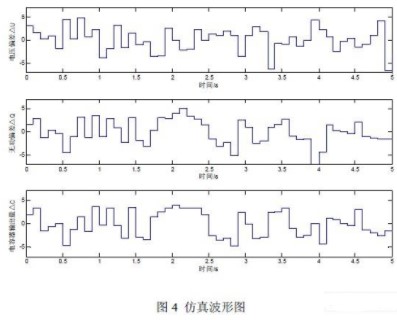
分析如下:
當(dāng)t=0.4~0.5 秒左右時(shí),電壓偏差是負(fù)小,無功偏差為零,電容器組投切量基本為0。 因?yàn)檫@種情況基本屬于電壓、無功合格區(qū),所以電容器組不動(dòng)作。
當(dāng)t=0.7~0.8 秒左右時(shí),電壓偏差是正大,無功偏差是正大,投電容器量是正中的,因 為無功偏差是正大的,通過投電容器可以降低電網(wǎng)無功,但考慮到電網(wǎng)電壓偏差很大,所以 投電容器量沒有選擇是最大的。
當(dāng)t=2~2.1 秒左右時(shí),電壓偏差為零,無功偏差為正大,投電容器組的量為正大。因?yàn)?無功偏差為正大,即需要補(bǔ)償大量的感性無功,通過投電容器組,可以補(bǔ)償感性無功,提高 電網(wǎng)的功率因素。
當(dāng)t=2.8~2.9 秒左右時(shí),電壓偏差正小,無功偏差負(fù)大,切電容器組的量為負(fù)大。因?yàn)?無功偏差是負(fù)大的,通過切電容器可使無功變大,在無功偏差與電壓偏差相比時(shí),本控制策 略更偏重于對(duì)無功的補(bǔ)償,因?yàn)樘岣唠娋W(wǎng)中的功率因數(shù)可以使電能質(zhì)量大大提高。
6 結(jié)論
本文通過對(duì)傳統(tǒng)九區(qū)圖控制法的分析,指出其缺點(diǎn),研究了電壓無功綜合控制的模糊推 理系統(tǒng)。并使用MATLAB 進(jìn)行輔助設(shè)計(jì),由仿真結(jié)果可知,該模糊推理器對(duì)于電容器的綜 合控制己經(jīng)達(dá)到了要求。
本文創(chuàng)新觀點(diǎn):采用模糊控制算法實(shí)現(xiàn)TSC 無功補(bǔ)償?shù)目刂疲c傳統(tǒng)九區(qū)圖控制 法相比,具有很大的優(yōu)越性,該控制系統(tǒng)減少了電容投切次數(shù),增加了系統(tǒng)的穩(wěn)定性。
-
電容器
+關(guān)注
關(guān)注
64文章
6208瀏覽量
99335 -
晶閘管
+關(guān)注
關(guān)注
35文章
1098瀏覽量
77099 -
電抗器
+關(guān)注
關(guān)注
7文章
546瀏覽量
37173
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
誰有基于matlab仿真的TSC型動(dòng)態(tài)無功補(bǔ)償裝置仿真整體結(jié)構(gòu)圖
神經(jīng)模糊控制在SAW壓力傳感器溫度補(bǔ)償中的應(yīng)用
模糊PID控制算法如何控制勻速升溫
基于DSP控制的新型靜止無功補(bǔ)償控制器的設(shè)計(jì)
基于PLC的無功補(bǔ)償控制系統(tǒng)
基于模糊控制的TSC無功補(bǔ)償系統(tǒng)的研究
變電站電壓無功模糊控制方法的研究
ELSPEC動(dòng)態(tài)電容補(bǔ)償柜/快速TSC無功補(bǔ)償柜簡(jiǎn)介
TSC和APF補(bǔ)償指令的計(jì)算

TSC和APF無功和諧波補(bǔ)償時(shí)補(bǔ)償指令計(jì)算
基于FPGA的模糊PID控制算法的研究及實(shí)現(xiàn)
APF與TSC混合補(bǔ)償裝置控制策略設(shè)計(jì)
TSC無功補(bǔ)償控制策略研究及仿真分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論