 關于永磁同步電機直接轉矩控制中開關表的應用
關于永磁同步電機直接轉矩控制中開關表的應用
摘要:本文討論了一種基于電壓矢量開關表的對于永磁同步電機的直接轉矩控制的方法。由于永磁同步電機電磁轉矩的變化與定轉子磁鏈間夾角的正弦值成比例,所以可以通過盡可能的增加定子磁鏈的轉速獲得快速的轉矩響應。在直接轉矩控制里,兩相靜止坐標系中劃分了六個扇區,定子電壓矢量的控制是通過選擇六個電壓矢量中的不同矢量來實現的。文章最后運用仿真實現了該控制策略,仿真結果也顯示了直接轉矩控制方法的特點。
引言
永磁同步電機以其結構簡單,運行可靠,特別是具有其他電機所無法比擬的高效率而得 到人們越來越多的關注。該電機多應用于要求快速轉矩響應和高性能運行的場合,而以往控 制永磁同步電機常采用電流控制方法。 直接轉矩控制技術是繼矢量控制技術之后發展起來的一種新型的高性能交流調速技術。
它應用空間矢量的分析方法,采用定子磁場定向,借助于離散的兩點式調節(Band-Band控 制),直接對逆變器的開關狀態進行最佳控制,以獲得轉矩的高動態性能。它省掉了復雜的矢 量變換,控制思想新穎,控制結構簡單,信號處理的物理概念明確,轉矩響應迅速,對轉子 參數不敏感。本文將直接轉矩控制技術應用于永磁同步電機的控制中直接控制電機的磁鏈和 轉矩,從而獲得起動時間矩、響應速度快的效果,文中對此進行了仿真分析和驗證。
1 PMSM 的數學模型
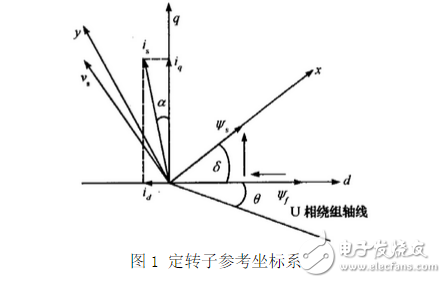
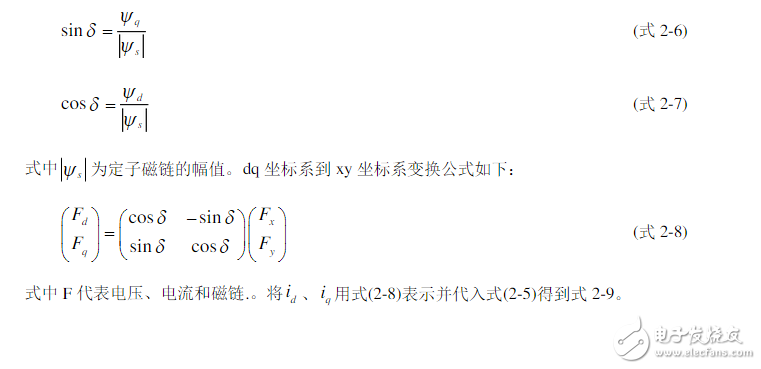
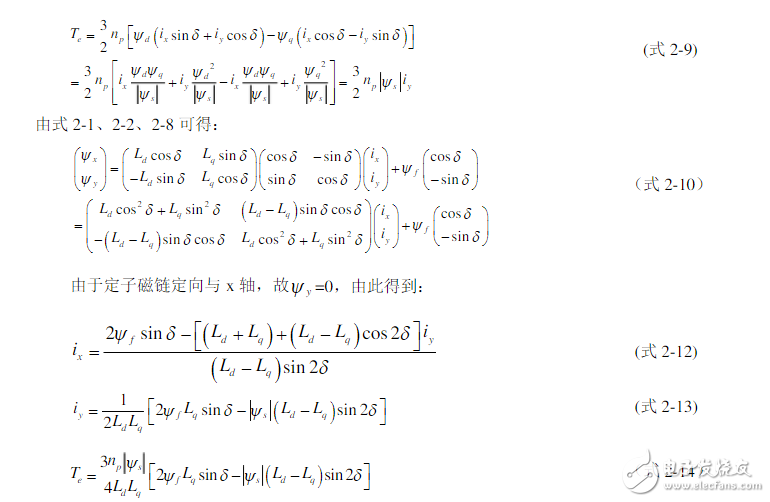
永磁同步電動機中磁鏈、電流和電壓的矢量關系如圖 1 所示。其中dq 坐標系固定在轉 子坐標系上,轉子磁鏈的軸向為d 軸的正向;定子磁鏈的方向為x 軸的方向。當忽略定子電 阻時,定轉子磁鏈夾角δ 定義為轉矩角。負載恒定且穩態運行時,定轉子磁鏈將以同步速度 旋轉,δ 恒定;瞬態時,定轉子磁鏈旋轉速度不同,δ 也隨之不斷變化。建立永磁同步電 機的數學模型,首先假設:
1)忽略電動機鐵心的飽和;
2)不計電動機中的渦流和磁滯損耗;
3)轉子無阻尼繞組。
故永磁同步電機的電壓、磁鏈和電磁轉矩方程為:
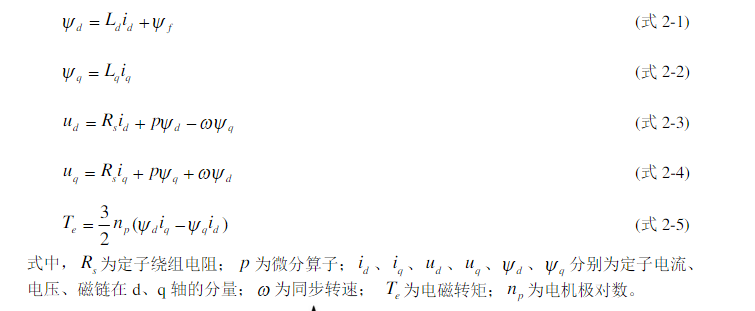
由上式可知,PMSM 的輸出轉矩由兩部分組成:第一項為永磁體產生的勵磁轉矩;第 二項為凸極結構產生的磁阻轉矩。當定子磁鏈為一恒定值時,電機的轉矩隨轉矩角的變化而 變化。又由于電機機械時間常數遠大于其電磁常數,亦即電機定子磁鏈的旋轉速度較轉子旋 轉速度容易改變,因而轉矩角的改變可通過改變定子磁鏈的旋轉速度和方向得以實現。所以 要實現永磁同步電機的直接轉矩控制,可以再保持定子磁鏈幅值不變的情況下,控制定轉子 此聯之間的夾角。
2 電壓矢量的選擇
在直接轉矩控制中,電壓空間矢量是一個非常重要的物理量。逆變器的六個工作電壓狀 態,給出六個不同方向的運動電壓空間矢量,它們周期性的順序出現,相鄰兩個矢量之間相 差60°,電壓空間矢量幅值不變。兩個零開關狀態給出兩個零電壓空間矢量,它們位于六邊 形的中心。適當的選擇電動機的空間電壓矢量,可以使磁鏈的運動軌跡近似為圓形。電壓空 間矢量的選取原則是該矢量能使定子磁鏈在一個控制周期內改變盡可能大的角度,即轉矩變 化最大。忽略定子電阻,則定子磁鏈與輸入電壓的關系為如式3-1。

這表明可以通過控制電機的輸入電壓US,使得定子磁鏈按照一定的軌跡和速度運動, 從而達到控制磁鏈的目的。
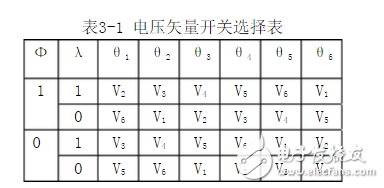
考慮到不同的電壓矢量對磁鏈和轉矩的作用及所處的區間不同,可得如表3-1所示的電 壓矢量開關選擇表。其中Ф=1,表示實際磁鏈小于參考磁鏈;λ=1,表示真實轉矩小于參考 轉矩;當Ф=0或λ=0時反之。
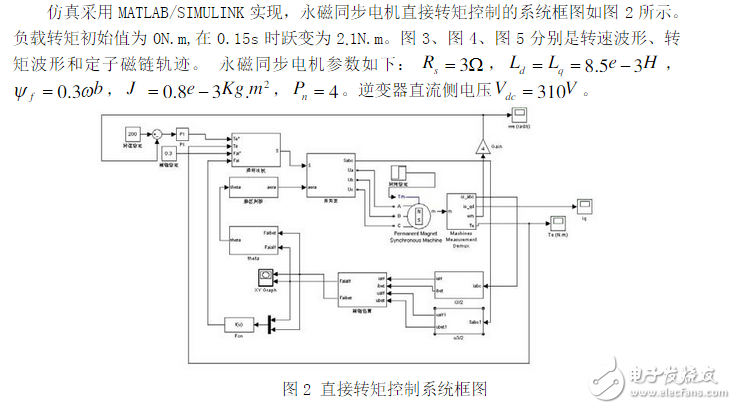
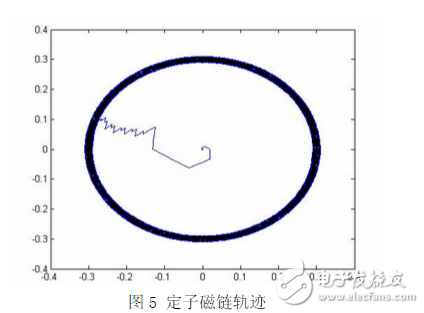
3 仿真分析
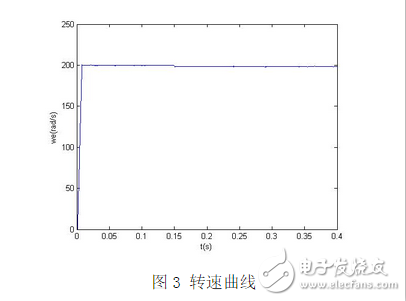
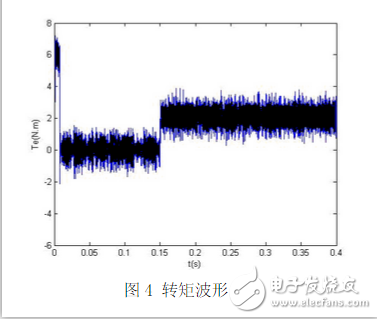
由以上仿真結果可知,該系統轉矩響應準確、迅速。在磁場已經建立的情況下,轉矩響 應幾乎不需要時間,突加負載后,轉矩也能較快地跟隨負載轉,磁鏈在起動時很快建立起來, 達到額定磁鏈后可以在動、靜態過程中近似保持恒定。轉速響應既保證了動態時快速性,又 保證了靜態時的穩定性。
結束語
本文分析了永磁同步電機的數學模型,對永磁同步電機直接轉矩控制的工作原理進行了 介紹,并構造了仿真模型,對直接轉矩控制系統進行了數字仿真。仿真結果表明,該方法具 有良好的動、靜態性能。但是針對永磁同步電機的直接轉矩控制還有許多問題有待深入,如 弱磁控制,轉矩脈動較大等。
-
永磁同步電機
+關注
關注
28文章
870瀏覽量
49498 -
直接轉矩控制
+關注
關注
2文章
81瀏覽量
12536 -
交流調速
+關注
關注
0文章
10瀏覽量
8245
發布評論請先 登錄
相關推薦
基于DSP的永磁同步電機直接轉矩控制系統
永磁同步電機直接轉矩控制(PMSM DTC)simulink仿真






 工商網監
工商網監
評論