 AGV控制系統分析 并應用PMAC運動控制卡
AGV控制系統分析 并應用PMAC運動控制卡
自動引導車(AGV) 是現代工業自動化物流系統中的關鍵設備之一, AGV在地面控制系統的統一調用下能夠實現貨物自動搬運、無人傳送等 。
AGV的工作特點要求AGV控制系統應具備電機多軸控制、多傳感器數據實時采集與處理、與上位機數據交換等功能。目前, 由于采用單片機成本低、集成度高、使用方便, 在運動控制中得到廣泛應用, 但其很難控制多軸設備; PLC工作可靠、控制的I/O點數多, 但控制2個電機進行插補運動困難, 控制多軸設備的成本高。DSP運動控制卡能夠進行2 軸及多軸控制, 價格不高, 但必須和工控機配合使用, 功能還不夠完善, 仍需進行大量的軟件開發工作。
本文提出一種以PMAC2 PC - 104運動控制器作為控制器的AGV底盤控制系統, 采用PMAC作為控制器使多軸控制變得更簡單, 控制系統更具開放性且實時性強。
1AGV系統硬件構成
PMAC ( Programmable Multi-Axis Controller) 是美國Delta Tau數字系統公司推出的一種可編程多軸運動控制器, 它采用Motorola公司的DSP56300處理器作為CPU, 可以實現最多8個坐標系同時運動,可以通過存儲在其內部的程序單獨操作 , 使用PMAC作為AGV控制器, 物理結構可以大大簡化,系統設計和調試過程也變得更簡單。
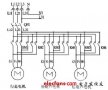
AGV采用4輪- 雙輪驅動, 左右2個同軸輪獨立驅動, 通過2輪差速實現AGV行駛狀態的調整, 適宜采用PMAC運動控制器作為系統的核心處理器, 為了實現PMAC 多軸控制功能, 需在PMAC板上擴展相應的I/O接口板, 同時采用伺服電機、伺服驅動單元、編碼器以及相應的傳感器構成1套完整的開放式AGV 控制系統, 見圖1。
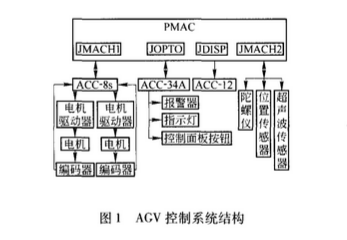
其中PMAC主要實現對AGV驅動電機、控制面板開關量以及報警裝置的控制。
2AGV控制系統伺服環設置
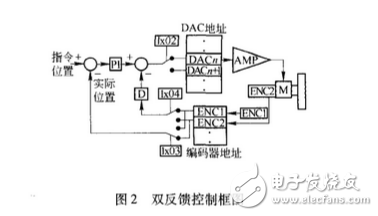
為保證AGV運行時的精確性和穩定性, 電機控制采用速度、位置雙反饋系統, 如圖2 所示。變量lx03指向寄存器地址$720作為位置編碼器的地址 , 在每一個伺服周期閉上位置環。電機編碼器的數據經過處理后存儲到lx03 指定的地址,閉上位置環。變量lx04指向寄存器地址$721作為速度編碼器的地址, 在每一個伺服周期閉上速度環。陀螺儀的數據經過處理后存儲到lx04指定的地址, 閉上速度環。使用雙反饋系統需將lx25變量設置為1, 以打開PMAC的硬件位置捕獲功能,提高控制精度。
3上位機通信程序編制
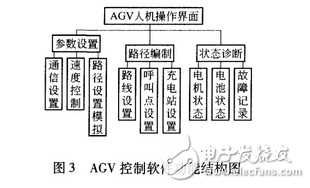
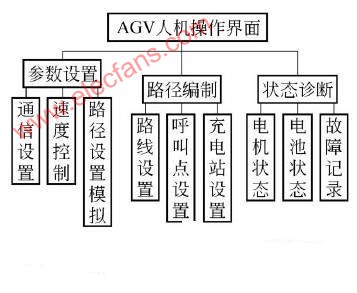
AGV控制軟件使用Visual C + +進行設計, 通過PMAC的各種參數設置實現對AGV小車運動路線的控制, 如圖3所示。AGV 控制軟件主要實現參數設置、路徑編制、狀態診斷功能。
Delta Tau公司為PMAC提供了PComm32動態鏈接庫, 作為上層應用程序與PMAC通訊的橋梁。PComm32包含所有上位機與PMAC 之間通信的200多個函數。
AGV控制軟件通過調用PComm32 中的函數實現對PMAC的控制, PComm32包括PMAC1dll、PMAC1VXD、PMAC1SYS 3 部分, 利用其提供的動態鏈接庫并結合Visual C + +編程, 通過調用動態鏈接庫提供的OpenPmacDevice () 、CloseP2macDevice () 、PmacGetResponse () 、PmacFlush ()等函數, PC 機將AGV 每個動作的相關數據以ASC II碼指令的形式發送至PMAC, 從而實現控制軟件與PMAC之間的命令和信息交換。PMAC執行順時針圓弧運動的PMAC 驅動命令程序如下:
CLOSE
&1#1 - 》 4000X設置坐標系
#2 - 》 4000Y
OPEN PROG 10 CLEAR
GOSUB 20000調用圓心計算子程序
Q0 =Q3 - Q9求圓心到終點的角度
Q27 =ATAN2 (Q4 - Q10)
WH ILE (Q28
Q11 =Q9 +Q5*COS(Q28) 圓弧X坐標
Q12 =Q10 +Q5SIN (Q28) 圓弧Y坐標
X (Q11) Y(Q12) 部分運動
Q28 =Q28 +Q8角度增加
ENDWH ILE
X (Q3) Y(Q4)終運動
RETURN
N20000計算圓心子程序
Q20 = SQRT( (Q3 - Q1) * (Q3 - Q1) + (Q4 - Q2) *(Q4 - Q2) )
Q21 =Q5* Q5 - Q20* Q20 /4
FQ23 = SQRT(Q21)
Q0 =Q3 - Q1
Q24 =ATAN2 (Q4 - Q2)起點到終點的角度
Q0 =Q20 /2
Q25 =ATAN2 (Q23) 中心離開中線的角度
Q26 =Q24 - Q25
Q9 =Q1 +Q5* COS(Q26) 中心X坐標
Q10 =Q2 +Q5* SIN (Q26) 中心Y坐標
RETURN
CLOSE
結束語
AGV集光、機、電、計算機為一體, 綜合了當今科技領域先進的理論和應用技術。以PMAC作為控制器, 能夠滿足AGV運動的高實時和高精度的要求, 其開放結構易于今后產品線的更新換代和系統的移植。
-
PMAC
+關注
關注
4文章
22瀏覽量
16420 -
AGV
+關注
關注
27文章
1280瀏覽量
41015 -
AGV系統
+關注
關注
0文章
11瀏覽量
5536
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論