 依托模糊自適應PID控制相關原理對APFC的設計
依托模糊自適應PID控制相關原理對APFC的設計
隨著電力電子技術的發展,電力電子設備在工業、農業等領域都得到了廣泛的應用。這些設備中的非線性器件產生的諧波污染問題給工業生產和社會生活帶來了危害與不便。因此,提高功率因數消除諧波成為電力電子技術一個重要的研究方向。本文重點介紹了模糊自適應控制器和常規PI 控制器組成的模糊自適應PI 控制器的設計方法,并用這種方法設計了一個有源功率因數校正(APFC)系統。通過MATLAB 仿真表明,引入模糊PI 控制設計的APFC 系統具有響應快,穩態精度高,功率因數提高顯著的優點。
在各個領域應用的電力電子設備中,普遍采用的一種變流方案是電力電子設備的輸入端引人220V 市電,經過橋式整流器整流得到直流電。例如UPS 電源的輸入部分電路。220V 市電經過橋式整流器整流后,后面一般會接一個大容量的電容器,以得到波形較為平直的直流電壓。由于整流器和電容器組成的整流濾波電路具有非線性,因此,雖然輸入交流電壓的波形是正弦波,但輸入交流電流的波形卻嚴重畸變,呈脈沖狀,脈沖狀的電流含有大量諧波,大量諧波電流倒流入電網使電網產生諧波污染。通常使用功率因數校正(PFC)技術來提高輸入端的功率因數。功率因數校正又分為無源功率因數校正和有源功率因數校正。由于有源功率因數校正具有輸入電壓范圍廣,能獲得較高的功率因數等優點而獲得廣泛應用。
由于功率因數校正本身是一個具有非線性,時變性和不確定性的復雜控制對象,數學模型很難建立,常規的控制方法無法完成控制任務。而模糊控制理論的出現,正好彌補這一缺點。模糊控制的對象不需要精確的數學模型。常規PI控制器具有一定的魯棒性,容易實現,穩態無靜差,控制精度高的特點,因此,本文將模糊控制和常規PI控制器相結合組成有源功率因數校正電路。
1 APFC 電路拓撲和控制電路設計
1.1 拓撲選擇
從電路工作原理上來說,電力電子技術中的幾種基本拓撲結構如Buck﹑Boost﹑SEPIC 甚至CUK 變換器都可以構成APFC 電路。但由于Boost 拓撲結構組成的APFC 具有輸入電壓范圍廣,輸入電流連續,EMI 小等優點而得到廣泛的應用。因此,本文也采用Boost 拓撲結構。
1.2 控制電路設計
Boost 有3 種方法實現APFC,即電流峰值控制法、電流滯環控制法和平均電流控制法 。而平均電流控制法采用了電流控制環和電壓控制環的雙閉環控制,因此,平均電流控制法具有平均電流與電感器峰值電流誤差小,輸出電壓穩定性好等特點。所以,本文按照平均電流控制方法設計了APFC 控制電路,平均電流控制的APFC 原理圖如圖2-1,其主要工作原理是:
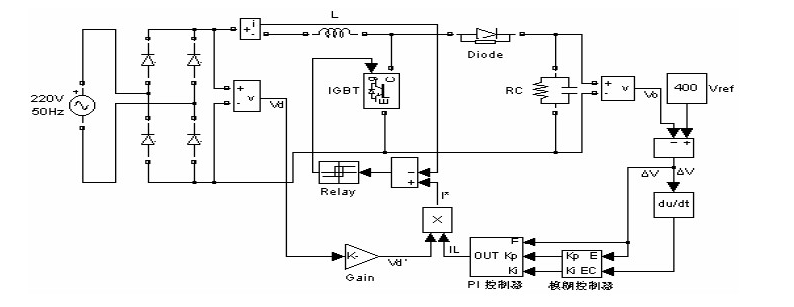
圖2-1 平均電流控制的APFC 原理圖
輸出電壓VO 經過加法器與參考電壓Vref 比較得到偏差電壓ΔV。偏差電壓ΔV 經過模糊控制器和PI 控制器調整后得到的控制量IL,整流橋輸出電壓Vd 除以其幅值,得到幅值為1 的正弦半波Vd',IL 和Vd'經過乘法器相乘得到電感電流指令I*。I*是幅值可以控制輸出電壓VO,相位與Vd 相同的正弦半波電流。實際的電感器電流IL 通過IGBT 的通斷來跟蹤I*,使網側電流正弦化,功率因數達到0.97-0.99。
2 自適應模糊PID控制器的設計
2.1 控制器的設計思想
常規PID控制器其結構簡單,穩態無靜差,控制精度高具有一定的魯棒性,因此,長期以來廣泛應用于工業過程控制。但是,實際中很多工業過程不同程度的具有非線性、參數時變性和模型不確定性,因此常規的PID控制器難以勝任。而模糊控制具有不需要知道被控對象的精確數學模型。模糊控制的實質將相關領域的專家知識和熟練操作人員的經驗轉換成模糊化后的語言規則,通過模糊推理和模糊決策,實現對復雜系統的控制。由于功率因數校正的控制量具有時變性,需要隨時根據受控對象的變化而做出調整,因此,模糊自適應控制更適合功率因數校正。因為模糊控制器已隱含微分的作用,因此,本文設計了模糊自適應PI控制器。
2.2 模糊自適應PI控制器的工作原理
模糊自適應PI控制器系統由PI控制器和模糊推理系統兩部分構成,PI控制器實現對系統的控制,模糊推理系統以誤差E和誤差變化EC作為輸入,根據PI控制器的兩個參數與偏差E和偏差的變化EC之間的模糊關系,在運行時不斷檢測偏差E及偏差變化EC,通過事先確定的關系,利用模糊推理的方法,在線修改PI控制器的兩個參數,實現自適應控制。
2.3 模糊自適應PI控制器的自適應規則
(1)當偏差E較大時,為使系統具有較好的跟蹤性能,應取較大的KP,同時為避免系統響應出現較大的超調,應對積分作用加以限制,通常取Ki=0。
(2)當偏差E和偏差變化EC處于中等大小時,為使系統響應具有較小的超調,KP應取得小些。在這種情況下,Ki的取值要適當。
(3)當偏差E較小時,為使系統具有較好的穩定性能,KP與Ki均應取得大些。
此外,根據控制專家的知識和熟練操作人員的經驗知道,當不確定系統在常規控制作用下,誤差E和誤差變化率EC越大,系統中不確定量就越大。相反,誤差E和誤差變化率EC越小,系統中不確定量就越小。E與EC同號,輸出值遠離給定值。E與EC異號,輸出趨向給定值。利用這種E和EC對系統不確定量的估計,就可實現對PI兩參數KP和Ki的調整估計,用if-then語句表達E和EC與KP和Ki之間的關系。
2.4 各變量隸模糊化及屬度函數的確定
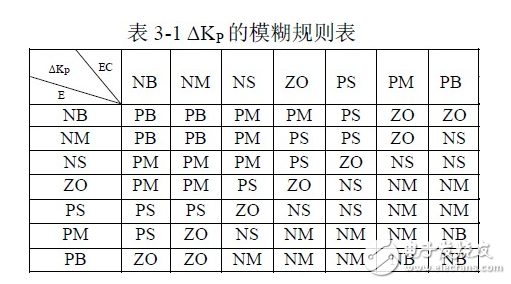
模糊PI控制根據系統運行的不同狀態,考慮KP、Ki兩者的關聯,取誤差E、誤差變化EC、比例系數變化ΔKP和積分系數變化ΔKi語言模糊集為[NB、NM、NS、ZO、PS、PM、PB]七個模糊值,其分別代表[負大、負中、負小、零、正小、正中,、正大]。誤差E、誤差變化EC、比例系數變化ΔKP和積分系數變化ΔKi基本論域為[-6、-5、-4、-3、-2-、1、0、1、2、3、4、5、6]。由于三角形函數圖形簡潔,占內存小,計算速度快,所以,誤差E、誤差變化EC、比例系數變化ΔKP和積分系數變化ΔKi的隸屬函數選擇三角形函數,3.5 模糊自適應PI控制器規則的建立:
根據工程設計人員的技術知識和實際操作經驗,建立誤差E和誤差變化EC與比例系數變化ΔKP、積分系數變化ΔKi的模糊規則表如表3-1,3-2所示。

根據模糊規則表,可以對ΔKP、ΔKi進行動態整定,設KP0、Ki0為采用常規整定方法得到的KP、Ki初始值,則PI控制表達式為:

3 模糊PI控制的APFC系統的MATLAB系統仿真
3.1 仿真電路的建立
在MATLAB/Simulink下建立仿真電路圖如圖4-1。
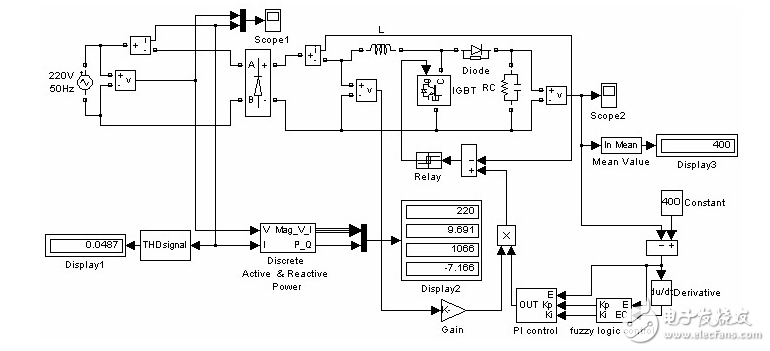
圖4-1 MATLAB/Simulink 建立的仿真圖
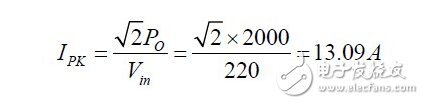
3.2 主要參數計算
輸入峰值電流
電感電流增量
電壓增量系數
儲能電感值
輸出電容器值

3.3 仿真參數的設置
輸入電壓有效值為220V,頻率50HZ,輸出電壓參考值400V,負載電阻160Ω。在二極管整流橋中,RS=1e5,CS=1e-6,Ron=1e-3,Lon=0,Vf=0。IGBT的Ron =1e-3,Rd=1e-2,RS =1e5,CS =inf。二極管的Ron =1e-3,Vf =0.8,RS =500,CS =250e-9。KP、Ki初始值分別為0.02和5。
輸入的量化因子分別取1.2和0.015,輸出的比例因子分別取1/600和1/6,利用powergui將仿真設置成離散的模型,仿真步長為1e-6。
3.4 仿真結果分析
從圖4-4可以看出輸出電流已經跟蹤輸入電壓,波形成正弦。通過仿真電路圖中測量儀器讀數計算功率因數:

圖 4-4 輸入電壓﹑電流仿真波形
圖4-5 輸出電壓仿真波形
結論
通過MATLAB仿真可以看出,模糊PI控制器完成了輸入電流跟蹤輸入電壓,穩定系統輸出電壓,功率因數接近1的控制目標,說明本文設計方案切實可行。而MATLAB軟件的使用也降低了設計成本,縮短了開發周期。
-
APFC
+關注
關注
0文章
38瀏覽量
33498 -
模糊自適應PID
+關注
關注
0文章
5瀏覽量
2462 -
模糊PID控制器
+關注
關注
0文章
4瀏覽量
2075
發布評論請先 登錄
相關推薦
模糊自適應PID控制的液壓提升分析
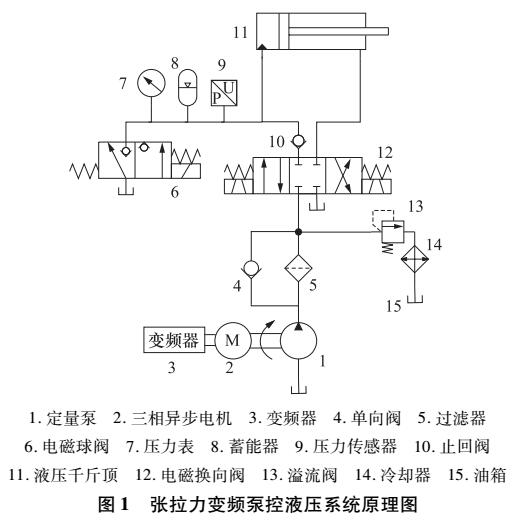
變頻泵自適應模糊PID張拉力控制





 工商網監
工商網監
評論