 使用DSP芯片實現太陽跟蹤控制器的設計
使用DSP芯片實現太陽跟蹤控制器的設計
引言
太陽能是一種無污染、無噪聲、無公害的可再生能源,目前開發利用太陽能的方式很多,光伏發電是其中一種主要的利用方式。所謂光伏,是以太陽能電池為媒介,將太陽光直接轉化為電能的過程。我國目前采用的光伏發電電池以普通單晶硅多晶硅為主,轉換效率較低;聚光電池轉換效率較高,但需要跟蹤精度較高的太陽跟蹤器,時時刻刻跟蹤太陽,使太陽光線與集光板垂直,利用圖1所示的菲涅耳透鏡使光線匯聚在聚光器的聚光電池上,提高能量密度,從而提高發電效率。

1 太陽跟蹤器跟蹤原理
目前國內外的太陽跟蹤器按跟蹤原理分為:傳感器檢測的主動跟蹤原理和太陽位置計算的被動跟蹤原理。本文將兩種原理相結合設計了基于TI公司的DSP芯片TMS320F2812的太陽跟蹤控制器。太陽自動跟蹤器由傳感器、信號處理及補償、微處理器、執行機構驅動接 口等單元電路組成(選擇不同的執行機構可以滿足不同的應用場合),驅動太陽 能設備自動對準太陽。當太陽光線發生偏移時,傳感器輸出信號,經過信號處理及 補償電路的處理,進入到微處理器,微處理器根據輸入信號,運行跟蹤算法,輸 出控制信號,通過接口電路單元驅動執行機構調整太陽能設備的角度,從而實現 自動跟蹤太陽的目的。
1.1 傳感器檢測的原理
利用硅光電池的光電效應,在太陽能集光板上高度和方位方向各放置兩個長方形的硅光電池板,陽光通過通光筒照射在硅光電池板上,如圖2所示。
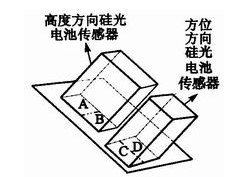
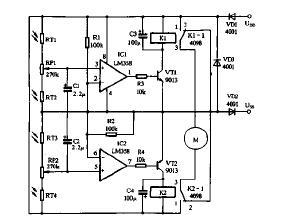
高度方向硅光電池被分為A、B兩個區域,方位方向硅光電池被分為C、D兩個區域。通過電壓比較電路可分別計算出它們之間的電壓差:
其中,UA、UB、UC、UD為A、B、C、D各點的電壓,K為標定系數,由此可在一定范圍內檢測角度偏差,從而確定運動方向和角度變化大小。
1.2 太陽位置計算的原理
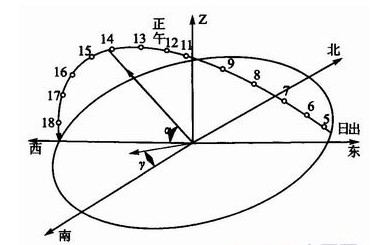
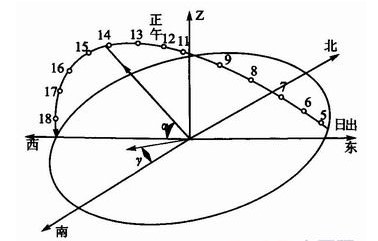
太陽在天球上的位置可由太陽高度角和太陽方位角來確定。地球上觀測點同太陽中心連線與地平面的夾角,稱為太陽高度角;地球上觀測點同太陽中心連線在地平面上的投影與正南方向之間的夾角,稱為太陽方位角。太陽運行軌跡與太陽高度角α、方位角γ的關系如圖3所示。
要計算α和γ,可以采用以下計算方法:

δ為太陽赤位角,ω為太陽時角,φ為當地的緯度。對于δ和ω這兩個參數的精確計算要滿足高精度跟蹤的需求,并根據實際情況來不斷修正;同時,還需要結合傳感器檢測的原理加以修正。采用TMS320F2812做主處理器,根據硬件時鐘提供的日歷時間計算出太陽的高度角和方位角,進而控制電機轉動方向和角度,由傳動機構帶動支架轉動精確地跟蹤太陽。
2 跟蹤器體系結構設計
根據上述工作原理,本設計以太陽位置計算的方法為主要跟蹤方式,采用硅光電池傳感器進行角度偏差反饋,設計了高精度太陽跟蹤器。
2.1 主要控制電路硬件設計
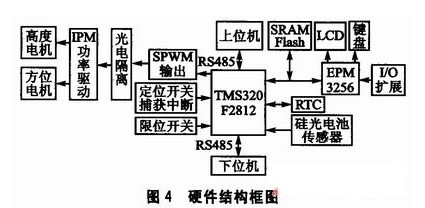
硬件結構框圖如圖4所示。選用TI公司32位定點數字信號處理器TMS320F2812和Altera公司的CPLDEPM3256為主協處理器。由DSP(數字信號處理(Digital Signal Processing)是一門涉及許多學科而又廣泛應用于許多領域的新興學科。20世紀60年代以來,隨著計算機和信息技術的飛速發展,數字信號處理技術應運而生并得到迅速的發展。數字信號處理是一種通過使用數學技巧執行轉換或提取信息,來處理現實信號的方法,這些信號由數字序列表示。在過去的二十多年時間里,數字信號處理已經在通信等領域得到極為廣泛的應用。德州儀器、Freescale等半導體廠商在這一領域擁有很強的實力)完成計算與控制算法,并產生用于步進電機控制的SPWM波;輸入/輸出接口采用光電隔離;驅動器電路選擇IPM模塊,可以達到功率驅動的目的,進而驅動高度和方位步進電機運轉。CPLD是從PAL和GAL器件發展出來的器件,相對而言規模大,結構復雜,屬于大規模集成電路范圍。是一種用戶根據各自需要而自行構造邏輯功能的數字集成電路。其基本設計方法是借助集成開發軟件平臺,用原理圖、硬件描述語言等方法,生成相應的目標文件,通過下載電纜(“在系統”編程)將代碼傳送到目標芯片中,實現設計的數字系統,實現實時顯示、掃描鍵盤、接收擴展中斷等功能。二者通過DSP的外部接口(XINTF)進行通信。采用光電開關和限位開關分別實現定位、限位功能,提高了系統的穩定性和可靠性。采用LCD顯示和5×5矩陣鍵盤,方便進行人機交互的臨時調整操作。
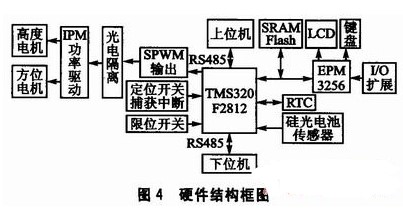
首先利用光電定位開關和硅光電池傳感器進行初始對準,通過TMS320F2812的SPI總線設置硬件時鐘RTC初值后,利用硬件時鐘實時讀取時間并計算太陽高度、方位角。在設定的工作時間內,依據計算的太陽高度、方位角選擇合適的運行時間和運行速度,計算步進電機應該轉的步數和控制板應該發的脈沖數。由 EV事件管理器產生SPWM波,經IPM功率驅動后,驅動高度和方位方向步進電機轉動,經機械傳動帶動太陽能集光器支架轉動適當角度,實現自動跟蹤。每天工作完以后自動返回歸位,若出現較大位置偏差,可以由光電開關和硅光電池傳感器進行修正。修正完畢重新進入自動跟蹤,工作完成后自動返回。
2.2 主要控制軟件設計
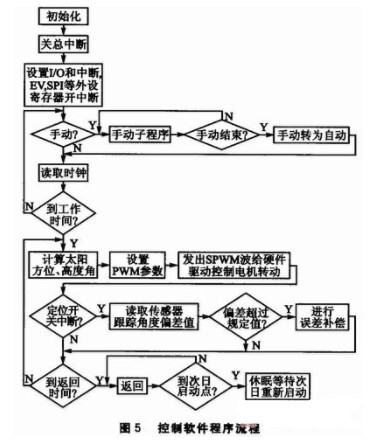
系統在正常工作時,每天從定位開關處開始自動運行,晚上返回定位開關處。啟動和返回時間由太陽高度決定。在完成一周期(即一天)的跟蹤后由時鐘電路的定時中斷信號進入休眠狀態,或定時由繼電器關閉總電源,減小系統功耗,待次日由定時中斷信號或值班電路給出信號喚醒處理器進入下一周期工作。控制軟件程序流程如圖5所示。
3 實際效果與誤差分析
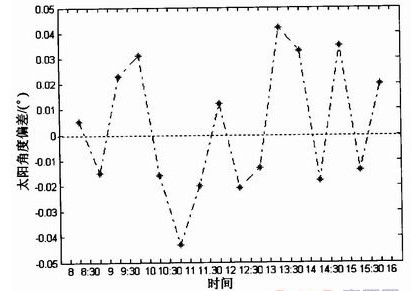
將設計的太陽跟蹤器應用在太陽能發電中。從2010年4月某天早上8:00工作至下午17:00,典型誤差測量結果如圖6所示。由于機械結構和傳動機構等的誤差,以及外界不確定環境(如大風等)的影響,跟蹤角度存在無規律性誤差,但總體來說誤差可以控制在±O.05°之內。
實踐運行情況表明,太陽跟蹤器實現了高精度跟蹤,年平均發電量比固定式高了20%~40%,比普通單軸式高出約25%。可見,該設計方案能夠使光伏發電效率大大提高。
結束語
本文對光伏發電系統中太陽跟蹤器的跟蹤原理進行了研究,闡述了基于TMS320F2812的太陽跟蹤器的軟硬件設計方法。設計了一種自動跟蹤太陽高度角與方位角轉動的自動太陽跟蹤器,現場運行結果表明該系統跟蹤準確、能耗低、可靠性高、系統性能穩定,發電效率提高35%以上,對以后建設電站等具有指導性意義,具有跟蹤精度高,成本相對較低,便于操作,性能穩定可靠,等的優點,大大提高了光伏發電效率,具有較高的實用價值。
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752045 -
dsp
+關注
關注
552文章
7962瀏覽量
348282 -
電池
+關注
關注
84文章
10468瀏覽量
129022
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論