 通過CAN總線實現多天線的數字化PID控制的設計與應用
通過CAN總線實現多天線的數字化PID控制的設計與應用
隨著電子科學技術的迅速發展,單基地雷達存在著很大的局限性,小型雙多基地雷達的應用越來越廣泛,需求日趨迫切。衛星通信具有通信距離遠,通信容量大,業務類型多,傳送不受地理條件限制等優點,在通信、廣播、導航定位、氣象服務、遙感遙測、地球資源勘測、環境監測、技術偵查等商用和軍事應用方面應用廣泛。其中,海事衛星通信系統在移動衛星通信中具有不可替代性,發展前景廣闊。復合式的雙基地雷達特別適合于空中交通管制系統,它比單基地雷達的測速效率高,精度好;此外雙基地雷達的目標分辨能力較高,在分析大氣的垂直結構時要比單雷達更優越,而大氣的垂直結構則是氣象分析的重點。CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由研發和生產汽車電子產品著稱的德國BOSCH公司開發了的,并最終成為國際標準(ISO118?8)。是國際上應用最廣泛的現場總線之一。 在北美和西歐,CAN總線協議已經成為汽車計算機控制系統和嵌入式工業控制局域網的標準總線,并且擁有以CAN為底層協議專為大型貨車和重工機械車輛設計的J1939協議。近年來,其所具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應用于汽車計算機控制系統和環境溫度惡劣、電磁輻射強和振動大的工業環境。
1 CAN總線多夫線控制系統的組成
CAN 的高性能和可靠性已被認同,并被廣泛地應用于工業自動化、船舶、醫療設備、工業設備等方面。現場總線是當今自動化領域技術發展的熱點之一,被譽為自動化領域的計算機局域網。它的出現為分布式控制系統實現各節點之間實時、可靠的數據通信提供了強有力的技術支持。在當前的汽車產業中,出于對安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。
多天線控制系統由本地控制組件、CAN總線和天線控制器組成,如圖1所示。其中本地控制組件包括本控面板、電源、微處理器和電機驅動電路,負責天線的位置信息采集和電機控制算法的實現;CAN總線采用CAN 2.0B標準協議進行數據傳輸,接口芯片采用SJA1000,完成物理鏈路層和數據鏈路層兩層功能;天線控制器包括顯示面板、控制按鍵、手輪、微處理器等,用于接收用戶操作指令,顯示指定天線的狀態和控制天線的運動方式。

在由CAN總線構成的天線控制系統中,天線控制器和本地控制組件各分配一個固定的CAN網絡地址,天線控制器通過面板選擇所要控制的天線編號,將該天線的工作方式(扇掃、環掃、手動)、工作參數(扇掃邊界、掃描速度)等發送到所選天線的本地控制組件,再由本地控制組件根據天線控制器給出的控制算法,實現對天線的控制,并將天線的當前參數(方位、轉速、轉向)通過CAN總線傳送到天線控制器上顯示。手動方式時,所選天線的本地控制組件根據天線控制器手輪的控制信息和跟隨算法,實現對天線的手動位置控制。
2 方位傳感器的數字化設計
傳感器是一種物理裝置或生物器官,能夠探測、感受外界的信號、物理條件(如光、熱、濕度)或化學組成(如煙霧),并將探知的信息傳遞給其他裝置或器官。傳感器是一種檢測裝置,能感受到被測量的信息,并能將檢測感受到的信息,按一定規律變換成為電信號或其他所需形式的信息輸出,以滿足信息的傳輸、處理、存儲、顯示、記錄和控制等要求。它是實現自動檢測和自動控制的首要環節。
在對天線位置信息的采集中,方位傳感器采用同步機電路實現。其中,定子線圈加入工頻激磁電壓,轉子的三相電壓幅度受定子與轉子相對角度的調制,三個轉子線圈之間相互間隔120°放置。在模擬信號傳輸中,同步接收機會根據三相電壓幅度的變化跟隨同步機做同步旋轉,達到傳輸角度信號之目的。為了便于與微處理器的連接,輸出的方位信號還必須做數字化處理。
設同步機定子加激磁電壓Vo=Vmsinωt,三個轉子線圈的電壓方程為:
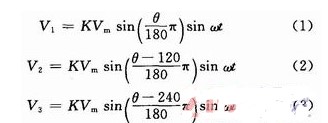
式中:K為轉子繞組與定子繞組的變壓比;θ為轉子相對于定子的轉角;ω為工頻激磁電壓的角頻率。
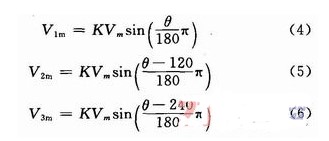
由此可知,在激磁電壓正峰值時,對三個電壓取值,則V1,V2,V3與轉角θ的關系為:
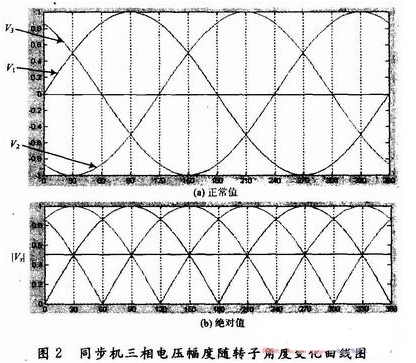
將轉角θ從0~360°劃分為12個區間,每個區間30°,則可將同步機三相電壓幅度隨轉子角度變化的曲線繪制如圖2所示。
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中絕對值最小的信號Vx的極性來表示這12個區間,則很容易得到各區間的二進制代碼,如表1所示。例如:當θ角在0~30°時,V1-V2為正,V2-V3為負,V3-V1為正,而此時V1的絕對值最小,即Vx=V1,其值為正,則該區間可以用(10 11)B表示。
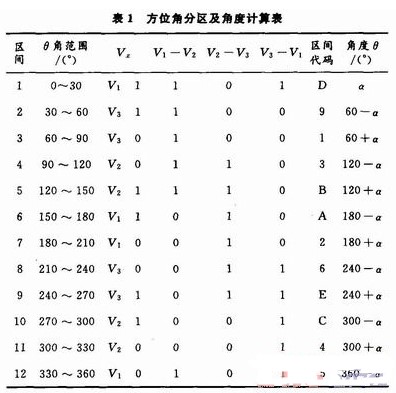
進一步,對此時的Vx信號做歸一化處理后再進行反正弦運算,其結果是單調的,且計算出的角度值α介于0~30°之間。根據θ角所在的區間,就可求出當前天線的方位。
根據以上分析,可以將方位信號數字化過程簡述如下:在激磁工頻信號的正峰值點生成采樣脈沖信號CP0和微處理器中斷信號CP1,控制三路采樣保持電路同時對分壓后的同步機三相電壓進行采樣保持,選擇絕對值最小的一路信號送A/D轉換器,同時判斷其正負;區間代碼生成電路根據對三路采樣信號的比較和最小信號的正負,確定θ角所處區間的代碼;微處理器響應中斷,啟動A/D轉換,求得α值,同時讀取θ角所處區間代碼,根據表1給出的區間計算公式,確定θ角的具體數值送本地面板顯示,并通過CAN總線上傳天線控制器。
方位數字化電路原理框圖如圖3所示。
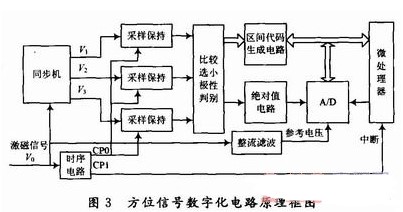
從圖2可以看出,在0~30°區間內正弦曲線可近似為線性區間,為進一步提高精度,可以按照正弦函數曲線對A/D轉換進行補償,以滿足精確測量的需要。同時,為避免因激磁電壓的波動引起A/D轉換后的數值在區間之間的跳動,A/D轉換器的參考電壓應與激磁電壓的幅度按比例浮動。
3 位置隨動旋轉編碼器接口設計
旋轉編碼器是隨動控制中常用的接口部件,這里選用增量式旋轉編碼器,它由涂有莫爾條紋的編碼盤和光電檢測裝置構成,編碼盤上涂有兩道相差90°的黑白相間隔柵,分別稱之為A道和B道。工作時,光電檢測器發出可見光照射在編碼盤上,當編碼盤旋轉時,光發射管裝置照過隔柵,光敏接收管便會產生通(斷)的脈沖輸出信號。由于A,B道相位差為90°,因此其輸出脈沖也有90°的相差。當旋轉編碼器正轉時,A信號超前B信號90°;反轉時,B信號超前A信號90°。
如果直接采樣A、B兩路信號,電路結構會比較復雜。為便于計算機處理,可將旋轉編碼器的A、B兩路信號進行適當變換,生成方向信號DIR和增量計數脈沖CLK.圖4給出了旋轉編碼器的接口電路以及相應的波形。為防止因機械轉動帶來的波形邊緣的抖動,接口電路的輸入應采用施密特型。
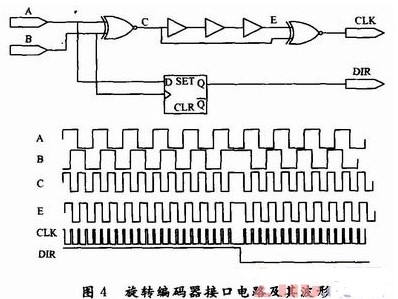
圖4中C點的方波周期是A或B信號周期的1/2.為了在手輪低速轉動時,防止由于A或B信號周期過大而影響計數器的正常工作,可將C點波形與經緩存器延遲后的波形E相異或,從而得到增量計數脈沖CLK,其周期應是C周期的1/2,即為A或B信號周期的1/4,實現A或B信號頻率的四倍頻細分。為便于計算機識別手輪的轉動方向,電路中增加了方向信號DIR,當旋轉編碼器正向轉動時,A信號超前B信號90°,此時DIR輸出為高電平;反之,DIR輸出為低電平。
4 天線的PID控制
當今的自動控制技術都是基于反饋的概念。反饋理論的要素包括三個部分:測量、比較和執行。測量關心的變量,與期望值相比較,用這個誤差糾正調節控制系統的響應。PID(比例-積分-微分)控制器作為最早實用化的控制器已有70多年歷史,現在仍然是應用最廣泛的工業控制器。PID控制器簡單易懂,使用中不需精確的系統模型等先決條件,因而成為應用最為廣泛的控制器。
圖5給出了天線的PID控制原理。如圖5(a)所示,在連續控制系統中,PID的控制規律可以寫成如下形式:

式中:u(t)為PID控制器的輸出或稱為被控對象的控制輸入;ε(t)為偏差;Kp為比例系數;TI為積分時間常數;TD為微分時間常數。
為在數字系統中實現PID控制,需將連續PID控制規律離散成離散型PID控制規律,即用差分方程來表示:
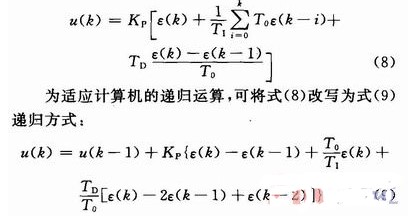
天線的離散型PID控制方案如圖5(b)所示。在該方案中,天線的工作方式分為自動掃描和手動掃描兩種。自動掃描方式下,天線控制器選擇設定相應天線的掃描轉速。由于不同波段的天線尺寸不同,各個天線轉臺的轉動慣量也不盡相同,因此需要通過調整相應天線的比例積分和微分常數,來使天線的控制達到期望的特性。而在手動掃描時,天線控制器將手輪的轉動控制,經位置隨動旋轉編碼器變換為對天線的控制輸出,通過CAN總線實時傳遞給指定天線的本地控制組件,由本地控制組件中的PID控制算法實現對天線的手動控制,從而達到手動跟蹤目標之目的。
5 結語
CAN總線技術已在工業控制中得到廣泛應用。本系統采用CAN總線,結合天線方位的數字化接口設計,將分布式微處理器聯系起來,實現了多天線的數字化PID控制,簡化了天線控制系統的設計,保證了天線控制的精度與穩定性。
-
控制器
+關注
關注
112文章
16214瀏覽量
177482 -
控制系統
+關注
關注
41文章
6550瀏覽量
110498 -
CAN總線
+關注
關注
145文章
1937瀏覽量
130640
發布評論請先 登錄
相關推薦
采用PIC18F458實現CAN總線接口設計
多天線多載波的數字上下變頻的FPGA實現方法有哪些?
數字化改變生活,數字化具有什么意義?
如何采用PXI總線接口實現高速數字化儀模塊的設計?

多天線多載波的數字上下變頻的FPGA實現

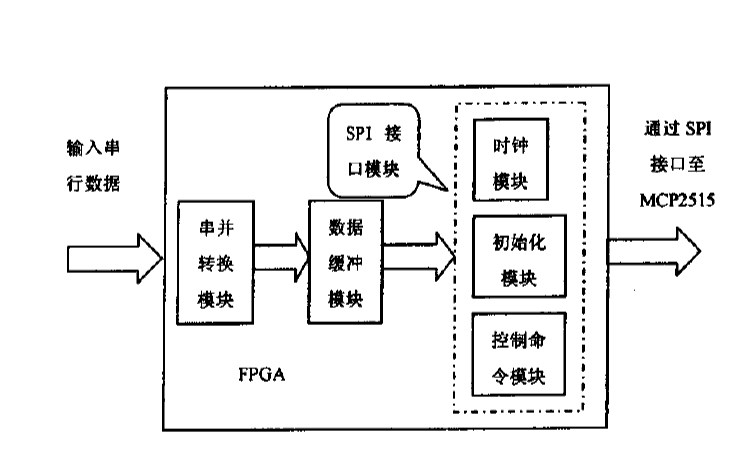
如何使用FPGA和CAN控制器MCP2515實現慣導系統的CAN總線接口的設計





 工商網監
工商網監
評論