 基于W77E58單片機和EPM7128芯片實現雷達網絡測控系統的設計
基于W77E58單片機和EPM7128芯片實現雷達網絡測控系統的設計
1、引言
隨著測控技術的快速發展,現代雷達系統對于多雷達高精度協同測控跟蹤能力的需求越來越高。然而,現役的大多數雷達并不具有這樣的功能。基于某型號雷達,我們開發了基于CAN總線的雷達網絡測控系統。經過對雷達加裝該系統,我們構建了雷達局域測控網絡,實現了基于CAN總線網絡的雷達間目標,狀態等相關信息的共享。利用這些信息,網絡中各雷達可以進行相互配合工作,極大地提高了雷達的探測與協同能力。
2、雷達網絡測控測控系統的基本結構與原理
2.1 CAN總線測控網絡的結構與特點
從本質上看,我們設計的雷達網絡測控系統,屬于主從式網絡測試控制系統。與數據網絡相比, 控制網絡具有數據幀短、數據交換頻繁、有實時約束等特點。同時雷達本身工作時電磁環境復雜,相對距離較遠,這都對采用的總線形式提出了較高的要求。
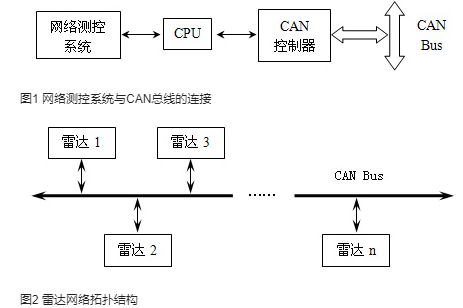
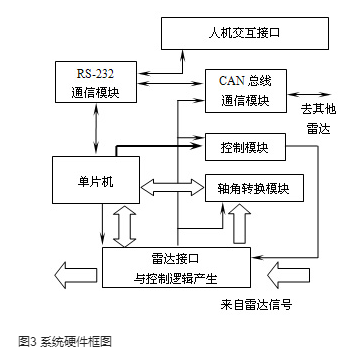
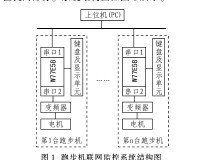
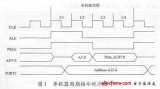
近20 年來, 控制網絡獲得迅速發展,特別是作為其主流的現場總線技術已形成了一系列國際標準,CAN總線是其中一種比較有影響的現場總線標準。CAN總線是一種多主方式的串行通訊總線,有高的位速率,高抗電磁干擾性,而且能夠檢測出產生的多種錯誤。當信號傳輸距離達到10Km時,CAN仍可提供高達50Kbit/s的數據傳輸速率。 同時CAN總線具有很高的實時性能,在工業控制、安全防護等領域中得到了廣泛應用。因此我們選擇CAN總線構建網絡。圖1與圖2分別顯示了雷達網絡測控系統與CAN總線的連接關系及各雷達間互連的拓撲結構。
2.2 系統原理
同其他網絡測控系統一樣,雷達網絡測控系統的主要工作基礎是對于相關數據的采集與共享。在這個網絡中,依據實際的工作環境與實際情況的需要,每個雷達既可以作為一個獨立單元工作,也可以作為網絡的節點工作。當雷達成為網絡的一個節點工作時,其可以依據網絡中共享的數據,與網內的其他雷達共同協同跟蹤工作。
在一般情況下,網絡中的雷達作為獨立的節點進行工作,此時網絡中的每個雷達是對等的。當出現特殊目標或其他需要多雷達對同一目標進行協同跟蹤的情況下,雷達的操作手可以通過雷達網絡測控系統向網絡發出進入網絡工作狀態的指令。網內其他雷達收到指令后,操作手可以依據該雷達的具體情況選擇繼續獨立工作或進入網絡協同工作。進入網絡的雷達之間為主從關系,發出指令與數據的雷達為主雷達,接收共享數據的雷達為從雷達。處于網絡狀態工作的雷達,也可以隨時退出網絡工作。
3、系統硬件結構
由以上對系統原理的分析可以看出,該系統的設計關鍵技術主要包括:雷達及目標信息的獲取與共享,目標數據的計算、校正及基于校正數據的目標跟蹤。系統的硬件設計亦基于此進行。
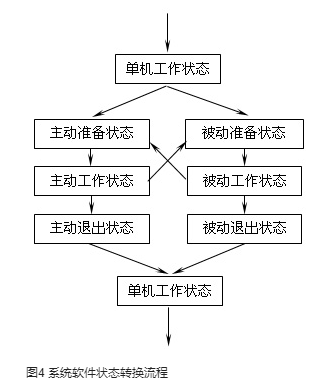
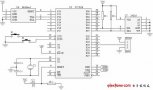
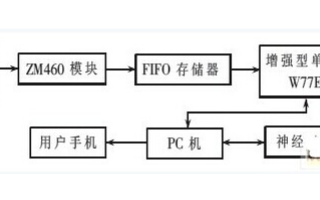
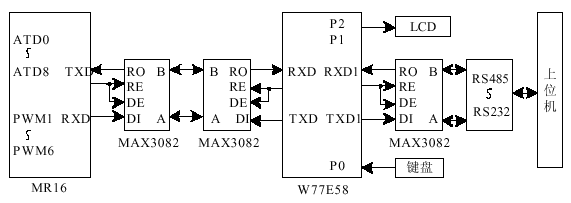
圖3給出了系統的硬件設計框圖。從框圖可以看出,該系統主要由單片機模塊,雷達接口模塊,通信與控制模塊,軸角轉換模塊及人機交互接口組成。
系統單片機模塊采用Winbond公司的高性能51兼容內核單片機W77E58實現系統控制。該單片機具有兩個相互獨立的串口,便于與外設通信,同時芯片支持高達40M的時鐘且具有倍頻模式,能夠滿足目標信息與控制信息的解算要求。
雷達接口模塊通過信號轉接電路從雷達中截取相關信號送至接口信號處理電路。其中,雷達的數字信號主要通過CPLD處理。我們使用了Altra公司的CPLD芯片EPM7128。其第一個作用是作為信號多路復用器與接口緩沖器。當控制系統狀態轉換時,其依據雷達的狀態,切換形成不同的數據總線開關狀態,同時將來自雷達及單片機的數據鎖存或緩沖,使雷達與單片機能交換正確的數據。其第二個功能是產生接口邏輯與控制系統的控制邏輯。利用來自雷達的時鐘信號、各種時序信號與狀態信號,產生接口控制信號,控制接口的數據交換與狀態轉換,同時依據單片機發來的地址與控制信號,合成控制系統的各種控制邏輯。
通信與控制模塊是處理后的信息與本雷達及其他雷達交互的接口。控制系統的狀態及目標數據等信息由單片機串口輸出后,通過MAX232變換送至人機交換模塊顯示,來自人機接口的控制信息同樣通過該接口下行至單片機。控制系統與CAN總線的互連同樣經過RS-232接口,并由CAN通信模塊完成RS-232協議與CAN協議的轉換,從而實現與遠端雷達的長距離、實時通信。經過控制系統解算的目標距離信息通過CPLD被雷達獲取,目標的角度信息則通過控制模塊完成D/A變換,電壓隔離與平滑等處理,送至雷達的天控系統,直接推動雷達完成對目標的跟蹤。
雷達天線軸角轉換使用了兩個雙精度軸角轉換模塊,分別完成對雷達天線方位角、高地角的數據提取。當雷達天線受控制系統控制時,該模塊構成雷達控制閉環的反饋支路。
人機交互模塊是操作手與控制系統交互的接口,來自控制系統的數據及狀態信息通過交互模塊顯示,操作手通過交互接口完成對控制系統的裝定與操作,當狀態轉換或出現通信、操作錯誤時,人機接口將發出提示或報警。
4、 系統軟件設計
系統的軟件設計主要針對系統狀態設計、系統轉換流程及數據通信與處理流程三個部分進行。
4.1 系統狀態設計
狀態設計主要是針對控制系統工作的各狀態,對系統硬件進行相應的操作。該系統主要設置了3個主要狀態:單機工作狀態,主動工作狀態,被動工作狀態。
在網絡尚未組織時,各雷達工作于單機工作狀態,網內雷達各自獨立工作,相互關系對等。當網絡建立后,網內的雷達將具有不同的優先級。其中,提供目標與雷達信息的雷達具有最高的優先級,工作于主動工作狀態,網內的其他雷達則工作于被動工作狀態。主動狀態下的雷達負責組織整個雷達網絡,由它向網絡發送目標的各種參數及雷達狀態信息,被動雷達從網絡獲取目標及雷達信息,并據此控制雷達工作,直至主動狀態雷達撤除網絡或操作手強制退出。這種主從工作方式保證了網絡的高可靠工作。
4.2 系統狀態轉換流程設計
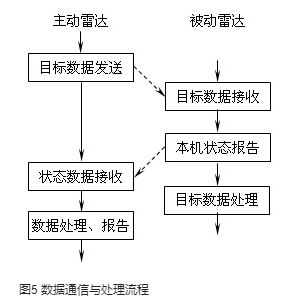
轉換流程設計則主要指系統依據目標的特征、性質,操作手的命令和網內其他雷達發來的指令,自動或被動地在各個狀態間進行轉換的流程設計。圖4顯示了系統軟件狀態轉換流程。從圖中可以看出,單機工作狀態是系統的缺省狀態,當網絡組織后,雷達將進入主動狀態或被動狀態工作。主動狀態或被動狀態是動態的,依據目標的不同特性,網絡發來的指令及操作手的指令,雷達能夠在主動狀態與被動狀態間進行相互轉換,并保證網絡中始終保證由一臺主動雷達組織。
4.3 數據通信與處理流程
數據通信與處理流程也是系統軟件設計的一個重要部分,圖5給出了這一流程框圖。從圖中可以看出,主動狀態雷達啟動并控制著整個通信過程。主動狀態的雷達向網絡發送目標
及雷達狀態數據,被動狀態雷達收到數據后,經過預處理向主動雷達發出應答信號。如果被動狀態的雷達收到的數據由于干擾等原因存在錯誤,同時在應答信號中要求主動雷達重新發送。當通信錯誤過多時,被動雷達將通過人機模塊報告錯誤,請求操作手處理。通信中使用了自定義的通信協議保證高可靠的加密傳輸。
5、 試驗結論
我們使用三臺經過雷達網絡測控系統改造雷達,進行了雷達網絡測控實驗。從目前的實驗結果看,經過改造的雷達能夠較好地實現與其他雷達的通信與數據交換,能夠實現較好的狀態切換。主動雷達跟蹤特定目標時,被動雷達能夠進行較為精確的聯合定位與跟蹤,基本達到了預期設計目標。
該課題創新地基于CAN總線構建了雷達局域測控網絡,實現了雷達間目標,狀態等相關信息的共享,及網絡中雷達的協同工作,提高了雷達的效能,填補了該方向上的空白。
責任編輯:gt
-
單片機
+關注
關注
6032文章
44516瀏覽量
632993 -
cpld
+關注
關注
32文章
1247瀏覽量
169215 -
雷達
+關注
關注
50文章
2901瀏覽量
117314
發布評論請先 登錄
相關推薦
基于W77E58單片機的光伏并網電站智能群控器設計
W77E58在RTU遙信單元中的應用
增強型51系列單片機W77E58的存儲器訪問
基于W77E58單片機的通用GSM無線傳真終端實現
基于CAN總線的雷達網絡測控系統設計
基于W77E58單片機的光伏并網電站智能群控器設計
基于W77E58的跑步機聯網系統的開發
高速單片機W77E58的特點及應用
基于W77E58單片機和Neuron 3150實現圖像采集系統的設計
基于W77E58單片機和68HC908MR16芯片實現串行通信監控系統的設計





 工商網監
工商網監
評論