 基于PLC與伺服實現的七頭鑰匙機系統配置及控制方案
基于PLC與伺服實現的七頭鑰匙機系統配置及控制方案
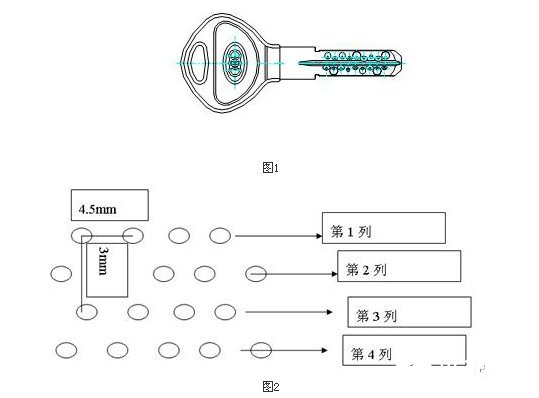
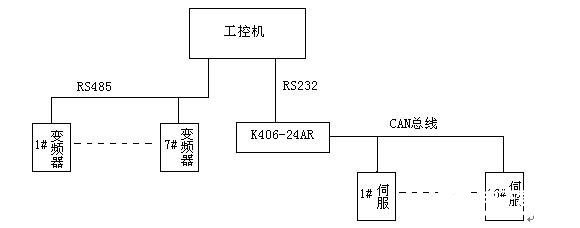
七頭鑰匙機是一種同時加工七把鑰匙的設備。鑰匙形狀如圖1所示,該鑰匙有兩面,每一面都有18個孔, 孔的排列如圖2所示。這種類型的鑰匙,孔的深度有三個規格,按照排列組合可產生出3億把不同的鑰匙,這使得鑰匙重復率非常低。
一、系統配置及控制方案
系統具體配置見表一:
表一
名稱規格型號數量
1工控機研祥1
2力控上位軟件力控6.01
3PLCK406CN-24AR1
4伺服驅動器ED430-0157-AA2
5伺服驅動器ED200-AA7
6伺服驅動器ED430-0040-AA7
7伺服電機130D-0157-20AAA2
8伺服電機23S41-0650-803J7-AA7
9伺服電機60S-0040-30AAA7
10變頻器SV32027
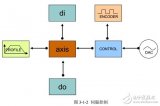
本系統用工控機通過MODBUS RTU協議分別跟Kinco PLC和臺安變頻器通訊,Kinco PLC則通過CAN總線控制Kinco伺服。該系統利用CAN總線的高通訊速率,從而可以快速地控制多臺伺服的聯動,達到了系統快速性的要求。系統控制方框圖如圖3所示:
在本系統中,工控機主要起到設置變頻器頻率,鑰匙編碼的生成和傳輸,通過PLC設置伺服的速度,并顯示各伺服的實時坐標;PLC主要是通過CAN控制伺服的動作,同時也通過I/O點控制變頻器的啟停。
二、工藝流程與要求
1)工藝流程
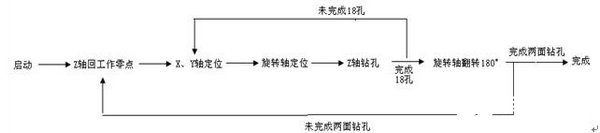
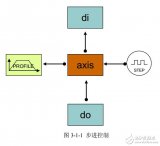
圖4
工作流程解析:首先啟動有兩個按鈕,一個是藍色的,一個是綠色的。藍色按鈕是按同一個序號編碼加工鑰匙;綠色是按下一個序號編碼加工鑰匙。按了啟動之后,Z軸開始回到工作零點(自定義的),到位后,X、Y軸也開始定位到第一個孔的位置,定位完成,旋轉軸旋轉設定的角度,完成后,Z軸開始鉆孔,鉆完一個孔后,X、Y軸繼續定位,一直到鉆完18個孔后,旋轉軸將鑰匙翻轉180°,然后再重復之前打孔的流程,直到鑰匙兩面都打了18個孔,X、Y、Z軸回工作零點,旋轉軸回到0°位置,鑰匙加工完成。
2)工藝要求
1. 工控機方面:能實時顯示X、Y、Z的坐標,可以自由設定孔間距、孔排距、孔深級差、各軸的速度,能從外部導入編碼文件,并從組態畫面自由的選擇某個編碼傳輸到下位機。實現多用戶操作,分三個等級,分別有不同的操作權限。
2.定位功能:用戶任意選定工作原點后,系統自動校正,以后運行時可以自動找原點;
3. 斷電保護:上電后程序沿著斷點繼續向下運行;
4.同時控制功能:能夠同時控制所有16套伺服按照工藝流程運行;
5.分別調整功能:每套伺服可分別單獨手動校準;
6.每分鐘可生產七把鑰匙,其中X、Y、Z方向精度為正負0.02mm,旋轉方向±20o旋轉范圍內精度±0.05o,可重復加工同一把鑰匙;
三、實現方法
1.伺服系統: X、Y軸采用1.57KW的三相伺服(ED430-0157-AA和130D-0157-20AAA);
Z軸采用7套兩相伺服(ED200-AA和23S41-0650-803J7-AA);
旋轉軸采用7套400W的三相伺服(ED430-0040-AA和60S-0040-30AAA);
2.工控機:工控機通過PLC設置各個伺服的速度,顯示伺服的當前位置和伺服報警信息,手動控制伺服和變頻器的啟停。利用數據庫鏈接功能,通過導入數據庫文件,從而可以從畫面上直接讀取數據庫里面的數據,并且根據PLC的信號來傳輸到PLC。
3.伺服的聯動:本系統最主要的動作就是要實現16個伺服的聯動,而本方案采用了CAN總線,利用我們的智能型伺服不需要脈沖/方向控制的特點和它的總線功能,用PLC通過CAN通訊中的PDO報文來設置伺服的操作模式、控制字、速度、位置等參數,從而啟動伺服的定位模式控制,同時也通過讀取伺服的狀態字來判斷伺服是否定位到位,從而以該到位條件來互鎖每個動作的執行,使得每個伺服能夠很好的完成彼此之間的聯動。
4.本方案做出的效果完全達到了客戶的要求,精度達到了正負0.01mm以內,并且速度達每分鐘7把鑰匙。
四、總結
在本方案中,PLC與伺服之間采用了CAN總線通訊,這就大大提高了伺服的響應速度,比起采用脈沖加方向的控制方案,CAN總線方案大大減少了布線,提高了速度,簡化了PLC的程序。
責任編輯:gt
-
plc
+關注
關注
5001文章
12935瀏覽量
459179 -
變頻器
+關注
關注
251文章
6387瀏覽量
142354 -
伺服驅動器
+關注
關注
22文章
455瀏覽量
31103
發布評論請先 登錄
相關推薦
基于GTS運動控制器系統配置及安全機制
基于GT-400-SCAN運動控制器系統配置及運動模式
一體化分散控制系統配置方案在發電廠的應用分析
FPGA CPLD可編程邏輯器件的在系統配置方法

通信電源系統配置設計參數
UART系統配置步驟詳解






 工商網監
工商網監
評論