 采用機器視覺技術實現導覽機器人控制系統總方案及軟硬件設計
采用機器視覺技術實現導覽機器人控制系統總方案及軟硬件設計
1 引言
在研究機器視覺的移動機器人導航技術的基礎上,基于層次結構,簡單介紹導覽機器人控制系統的總體方案及軟硬件設計。采用圖像處理中的邊緣檢測和模板匹配方式進行機器人的視覺導航,使機器人在結構化道路環境下能夠自動躲避障礙物,停靠到目標點,并能向參訪者導覽解說,最后驗證了該系統的有效性和優越性。
2 導覽機器人簡介
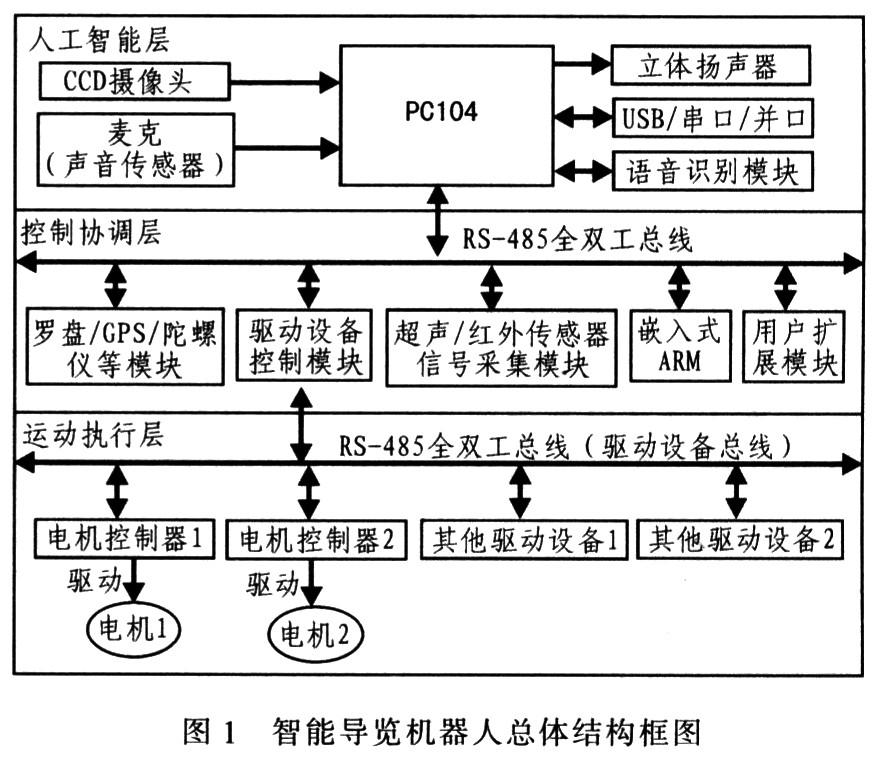
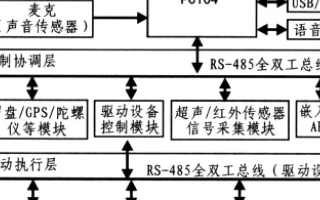
導覽機器人用在大型展覽館、博物館或其他會展中心,引導參訪者沿著固定路線參訪,向參訪者解說以及進行簡單對話。因此導覽機器人必須具有自主導航、路徑規劃、智能避障、目標點的停靠與定位、語音解說以及能與參訪者進行簡單對話等功能,并具有對外界環境快速反應和自適應能力。基于層次結構,導覽機器人可分為:人工智能層、控制協調層和運動執行層。其中人工智能層主要利用CCD攝像頭規劃和自主導航機器人的路徑,控制層協調完成多傳感信息的融合,而運動執行層完成機器人行走。圖1為智能導覽機器人的總體結構框圖。
3 導覽機器人硬件設計
3.1 人工智能層硬件實現
考慮到移動機器人控制系統要求處理速度快、方便外圍設備擴展、體積和質量小等要求,因此上位機選用PC104系統,其軟件用C語言編程。采用USB攝像頭,采集機器人前方的視覺信息,為機器人視覺導航,路徑規劃提供依據。外設麥克和揚聲器,當機器人到達目標點后,進行導覽解說。
3.1.1 控制協調層的硬件實現
機器人傳感器的選取應取決于機器人的工作需要和應用特點。這里選用超聲波傳感器、紅外傳感器、電子羅盤及陀螺儀,采集機器人周圍環境信息,為機器人避障、路徑規劃提供幫助。利用ARM處理平臺,通過RS-485總線驅動電機,驅動機器人行走。
導覽機器人要求傳感器精度稍高,重復性好,抗干擾能力強,穩定性和可靠性高。機器人在行進過程中必須能夠準確獲得其位置信息,數字羅盤可靠輸出航向角,陀螺儀測量偏移并進行必要修正,以保證機器人行走的方向不偏離。采用超聲波傳感器和紅外傳感器相結合的方法獲取前方障礙物信息。該系統設計選用6個超聲波傳感器和6個紅外傳感器。其中,正前方和正后方各1個,其余4個超聲波傳感器分別位于正前方和正后方的兩邊,夾角為45°,紅外傳感器分別安裝在超聲波傳感器的正上方1~2 cm處。超聲波傳感器主要通過測距實現避障,而紅外傳感器主要是用于補償超聲波傳感器的盲區,判斷近距離是否有障礙物。
3.1.2 運動執行層的硬件實現
該智能導覽機器人的執行機構采用直流伺服電機。這里選用三洋電機Super_L (24 V/3.7 A)額定輸出功率為60 W,最大空載轉速為3 000 r/rain,并帶500線的光學碼盤,使機器人完成相應動作。導覽機器人采用閉環控制,通過光學碼盤測量車輪速度的實際值并反饋給微控制器。基于實際轉速與給定轉速的差值,驅動器按一定的計算方法調整相應電壓,如此反復,直到達到給定轉速。機器人調速采用FAULHABER公司的 MCDC2805實現。它能實現速度同步性能,同時轉矩波動最小,內置PI調節器能準確到達指定位置。當配備Super_L電機及集成編碼器時,即使在轉速非常低的情況下,也能達到0.180的定位控制精度。
3.2 導覽機器人軟件設計
通過USB攝像頭或其他攝像頭采集導覽機器人前方的視覺信息,通過圖像處理算法處理視頻,使機器人能夠進行路徑規劃和自主導航。通過接收下層的多傳感融合信息,能夠實現近距離的避障,遇到障礙物時進行自動報警。到達目標點后,能夠語音解說,解說完后能與參訪者進行簡單對話。
4 視覺導航
視覺導航機器人的整個系統由兩部分構成:添加了無線通信模塊和無線攝像頭的能力風暴機器人和遠程計算機。這兩部分之間的通信由無線通信模塊完成。機器人包括能力風暴機器人、無線攝像頭和無線通信模塊三個部分。在機器人工作時,無線攝像頭將采集到的視頻信號傳送給無線視頻接收器,無線視頻接收器再通過視頻采集卡(Osprey210)將待處理的視頻信號傳送給計算機,計算機經過處理后,做出相應的決策,并將決策信號通過無線通信模塊發送給機器人,這樣就建立了一個簡單的閉環控制系統。無線通信模塊由兩個完全相同的無線串口通信模塊組成,工作在全雙工狀態。在機器人中無線通信模塊與機器人的串口控制器連接,在計算機中無線通信模塊與計算機的COM口相連。
4.1 圖像預處理
原始圖像為Logiteeh攝像頭采集的一幅室內用藍色標簽制作的結構化道路圖片,像素大小為320x240,首先將原始圖像進行灰度變換,并通過選取合適的閾值進行二值化處理。然后提取罔像有用信息,通過形態學的膨脹腐蝕等操作提取前進方向。如圖2所示。
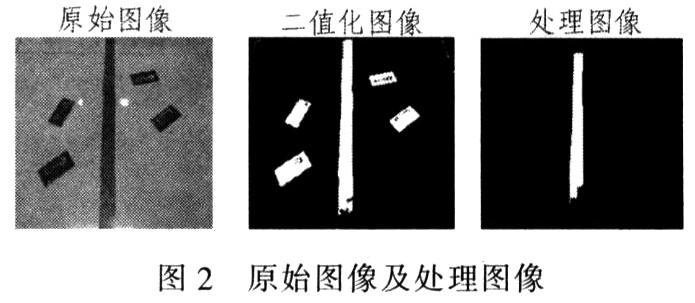
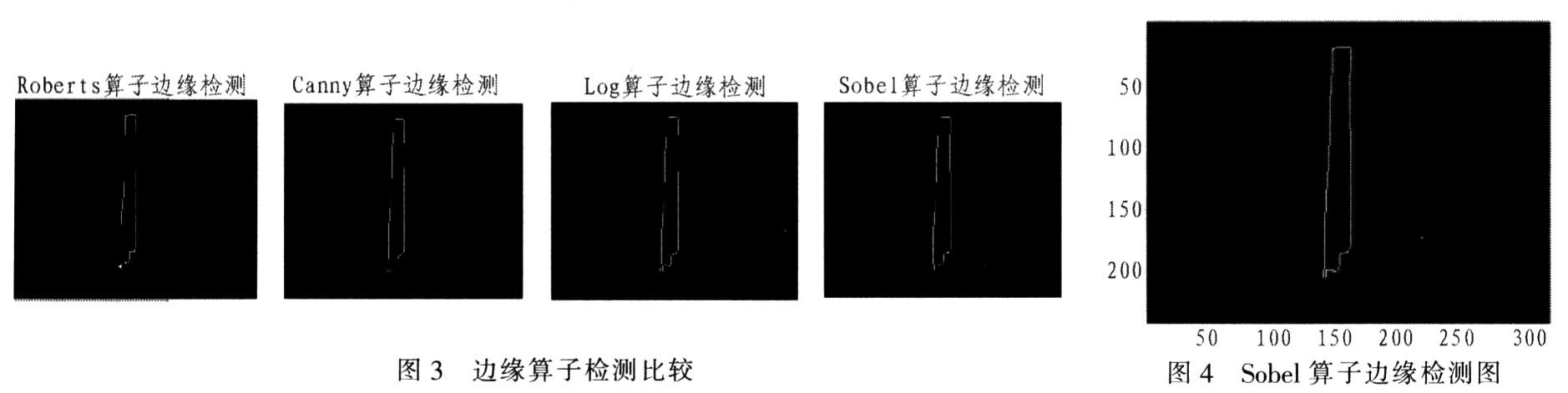
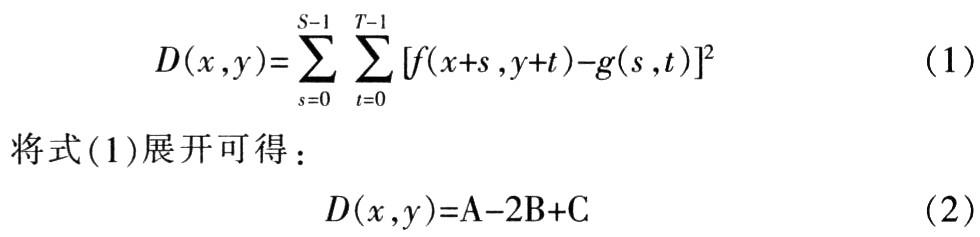
圖3為常見的邊緣算子檢測效果比較。從圖3中可看出Canny和Sobel算子檢測效果相對好些,其中Sobel算子對噪聲具有平滑作用,能提供較為精確的邊緣方向信息。這里采用Sobel算子進行檢測,如圖4所示。
根據圖4,系統通過hough變換檢測兩條直線的位置,測出圖像的兩條邊緣線離兩端的像素大小,再根據實際地面距離進行標定,便可獲知機器人所在位置。
4.2 模板匹配算法
模板匹配技術是圖像目標識別技術中一個重要的研究方向,具有算法簡單、計算量小以及識別率高等特點,目前在目標識別領域得到廣泛應用。它是用一個較小的圖像,將模板與源圖像相比較,確定在源圖像中是否存在與該模板相同或相似的區域,若該區域存在,可確定其位置并提取該區域。它常采用模板與源圖像對應區域的誤差平方和作為測度。
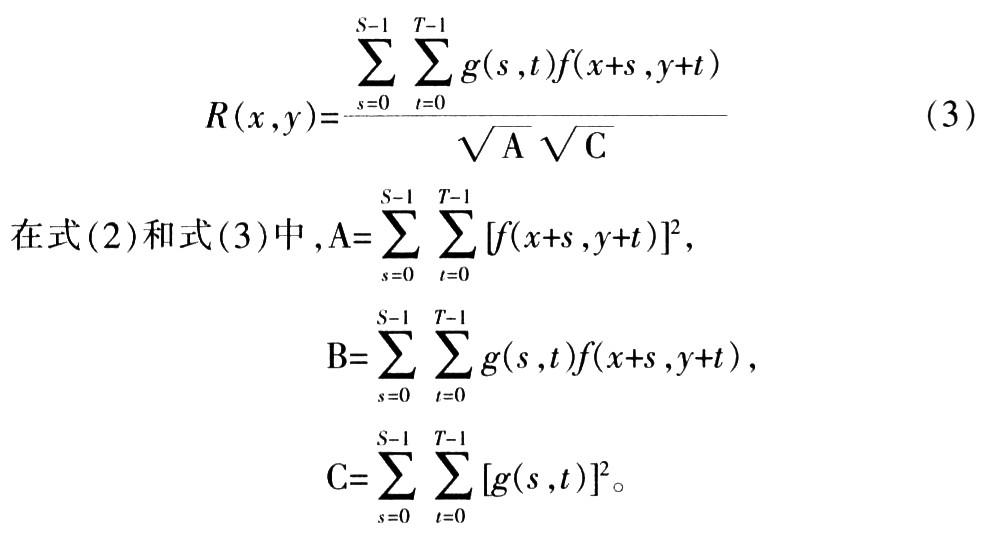
設f(x,y)為MxN的源圖像,g(s,t)為SxT(s≤M,T≤N)的模板圖像,則誤差平方和測度定義為:
當A為常數時,則可用2B相匹配,當D(x,y)取得最大值時,便認為模板與圖像相匹配。通常假設A為常數時會產生誤差。嚴重時將無法正確匹配,因此可用歸一化互相關作為誤差平方和測度,定義為:
4.3 模板匹配改進算法
但是按模板匹配算法求匹配計算工作量非常大,考慮到相關是卷積的一種特定形式以及 Matlab計算功能的強大,采用FFT方法,在頻域中計算后再進行逆變換即可求出。圖像和定位模板圖像旋轉180°的傅里葉變換后作點乘運算,再求其逆 FFT變換并返回空間域值也就相當于相關運算。在求取空間域值的最大值后,再根據最大值選取合適的閾值,便可確定目標點的位置。實驗中在模板匹配成功后,可將目標和背景顏色二值化,并用紅色“十”字符號標記,不斷更新數據信息。將停靠點設定在自己期望的像素位置,然后自動調整機器人位置,設計成如圖5形式,可知機器人需要向右行駛。
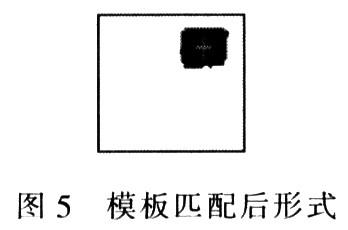
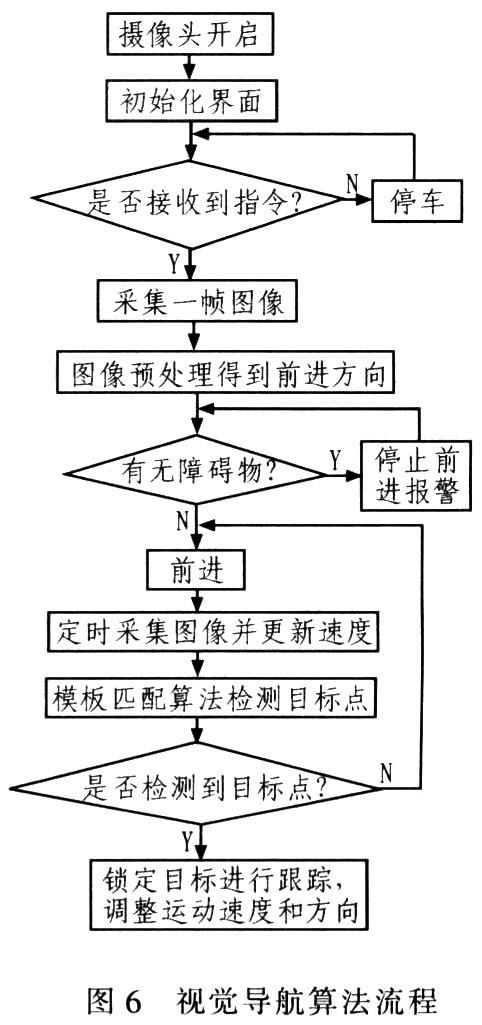
圖6為視覺導航算法流程。
5 實驗結果與結論
本文所介紹的設計為簡易機器人(能力風暴機器人)添加了視覺模塊和無線通信模塊,并研究了相關算法和策略,實現了自主路徑跟蹤。為了使系統真正做到穩定快速,在圖像預處理、路徑識別和路徑跟蹤等各個環節都充分考慮到算法的實時性與魯棒性。
-
控制系統
+關注
關注
41文章
6550瀏覽量
110498 -
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
機器視覺
+關注
關注
161文章
4348瀏覽量
120134 -
人工智能
+關注
關注
1791文章
46896瀏覽量
237670
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論