") 基于PIC16F639和PIC18F4680單片機(jī)實(shí)現(xiàn)PKE智能鑰匙系統(tǒng)的設(shè)計(jì)
基于PIC16F639和PIC18F4680單片機(jī)實(shí)現(xiàn)PKE智能鑰匙系統(tǒng)的設(shè)計(jì)
隨著汽車電子技術(shù)的不斷發(fā)展,傳統(tǒng)的無線門禁系統(tǒng)已無法滿足廣大用戶的需求。免持式被動(dòng)無鑰匙門禁系統(tǒng)PKE(Passive Keyless Entry)正迅速成為汽車遠(yuǎn)程無鑰匙門禁應(yīng)用的主流,并成為新型汽車的普遍選擇。在汽車裝配有PKE智能鑰匙系統(tǒng)的情況下,車主只要靠近車輛或者碰一下車門,車門就能自動(dòng)打開。PKE智能鑰匙系統(tǒng)是汽車智能化、信息化、電子化的體現(xiàn),提高了整車的安全性、可靠性、舒適性,具有極佳的市場(chǎng)前景和巨大的潛在效益。
智能鑰匙能發(fā)射出紅外線信號(hào),既可打開一個(gè)或兩個(gè)車門、行李箱和燃油加注孔蓋,也可以操縱汽車的車窗和天窗,更先進(jìn)的智能鑰匙則像一張信用卡,當(dāng)司機(jī)觸到門把手時(shí),中央鎖控制系統(tǒng)便開始工作,并發(fā)射一種無線查詢信號(hào),智能鑰匙卡作出正確反應(yīng)后,車鎖會(huì)自動(dòng)打開。只有當(dāng)中央處理器感知鑰匙卡在汽車內(nèi)時(shí),發(fā)動(dòng)機(jī)才會(huì)啟動(dòng)。
1 系統(tǒng)硬件設(shè)計(jì)
1.1 PKE系統(tǒng)的工作原理
無鑰匙門禁系統(tǒng)(PKE,Passive Keyless Entry)在RKE基礎(chǔ)之上發(fā)展起來,作為新一代防盜技術(shù)正在逐步發(fā)展壯大,目前已經(jīng)從高檔車市場(chǎng)逐步進(jìn)入中檔車市場(chǎng),不僅奔馳、寶馬等高端汽車制造商已經(jīng)廣泛采用了PKE,像福特蒙迪歐、日產(chǎn)的天籟和新型馬自達(dá)等中型車型也紛紛采用這一技術(shù)。PKE不是傳統(tǒng)的鑰匙,而是一個(gè)智能鑰匙,類似于智能卡。當(dāng)駕駛者踏進(jìn)指定范圍時(shí),該系統(tǒng)通過識(shí)別判斷如果是合法授權(quán)的駕駛者則進(jìn)行自動(dòng)開門。上車之后,駕駛者只需要按一個(gè)按鈕即可啟動(dòng)點(diǎn)火開關(guān)。
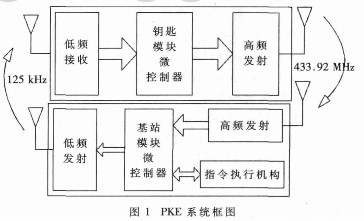
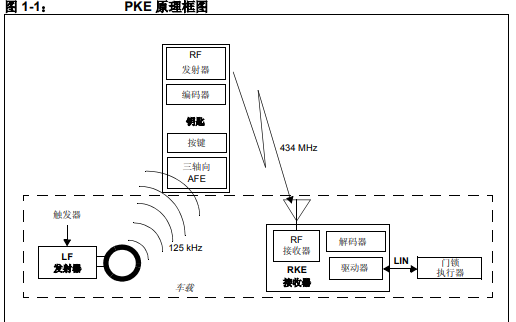
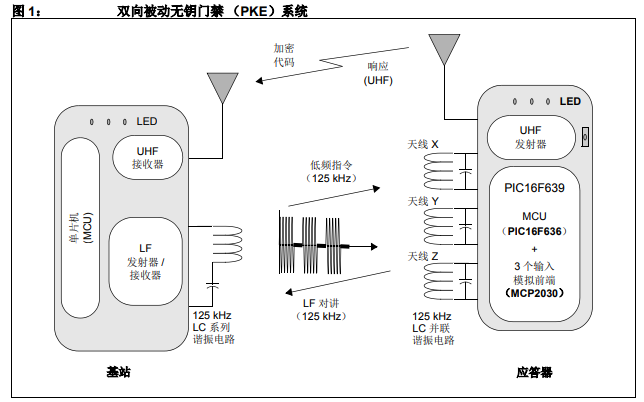
PKE智能鑰匙系統(tǒng)分為基站(車身)和應(yīng)答器(鑰匙)兩部分,系統(tǒng)框圖如圖1所示。這兩部分之間采取雙向通信。該系統(tǒng)有兩種工作方式:第一種是車輛中的基站單元不停地發(fā)送一條編碼為125 kHz的低頻報(bào)文以搜尋并喚醒一定范圍內(nèi)的應(yīng)答器。該信號(hào)范圍內(nèi)的所有應(yīng)答器都能夠接收到該報(bào)文,并對(duì)編碼的數(shù)據(jù)字段進(jìn)行驗(yàn)證。一旦車主身上的應(yīng)答器識(shí)別成功,它就會(huì)自動(dòng)發(fā)送一條頻率為433.92 MHz的射頻Keeloq編碼報(bào)文,基站單元在收到該報(bào)文后對(duì)其進(jìn)行解碼,如果識(shí)別成功,將控制指令執(zhí)行機(jī)構(gòu)打開車門。第二種工作方式中基站單元為了降低電流消耗并不會(huì)輪詢應(yīng)答器。基站單元一般處于休眠狀態(tài)或掉電狀態(tài),只有當(dāng)觸發(fā)事件發(fā)生時(shí)才能將其喚醒,該觸發(fā)事件一般是汽車門把手上的紅外信號(hào)或者是由汽車門把手裝置激活的微動(dòng)開關(guān)。在第二種工作方式下車主必須碰一下車門才能觸發(fā)系統(tǒng),從而打開車門。
1.2 應(yīng)答器(鑰匙)模塊設(shè)計(jì)
應(yīng)答器模塊由微控制器、高頻發(fā)射電路、低頻接收電路和開關(guān)按鈕組成,其電路圖如圖2所示。根據(jù)以上特性,微控制器選擇微芯公司的PIC16F639。該芯片采用SSOP封裝,體積小,內(nèi)置一個(gè)Keeloq加密模塊和一個(gè)3通道模擬前端,可用于多種低頻檢測(cè)和雙向智能通信。
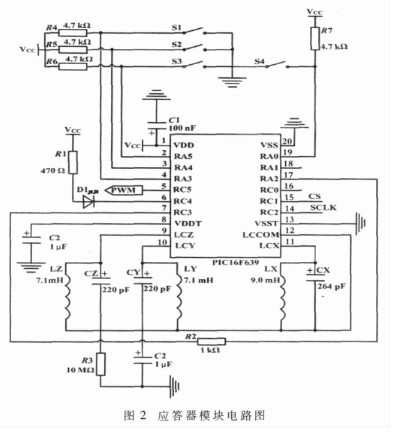
應(yīng)答器模塊采用3 V紐扣電池供電,采用內(nèi)部4 MHz時(shí)鐘。在沒有低頻激勵(lì)的情況下,應(yīng)答器模塊以標(biāo)準(zhǔn)RKE(Remote Key Entry)模式工作,當(dāng)接收到有效的低頻激勵(lì)報(bào)文時(shí),微控制器將如同按下一個(gè)虛擬按鍵一樣做出響應(yīng)。4個(gè)按鍵(S1~S4)分別接到微控制器的PORT A口,通過電平的變化喚醒休眠中的PIC16F639,并觸發(fā)中斷,完成相應(yīng)的上鎖、解鎖、報(bào)警等功能。二極管D1用來指示高頻信號(hào)的發(fā)射,高頻信號(hào)由引腳RC5發(fā)出的PWM經(jīng)過聲表面波諧振器產(chǎn)生[2]。
應(yīng)答器對(duì)基站發(fā)送過來的低頻喚醒信號(hào)通過PIC16F639的3通道模擬前端實(shí)現(xiàn)。PIC16F639具有高達(dá)3 mVpp的模擬輸入靈敏度的3個(gè)天線連接引腳(LCX、LCY、LCZ)。通過連接3個(gè)分別指向x軸、y軸、z軸的天線,應(yīng)答器可以隨時(shí)接收來自任何方向的信號(hào),從而降低由天線的方向性而造成信號(hào)丟失的可能性。在此系統(tǒng)中,3個(gè)方向天線采用PREMO公司專門為PIC16F639設(shè)計(jì)的集成天線模塊,該天線模塊體積小、精度高,電感值在出廠時(shí)已經(jīng)配置好,只需要配合對(duì)應(yīng)通道的電容便可使用。當(dāng)模擬前端搜尋信號(hào)時(shí),數(shù)字MCU部分可以進(jìn)入休眠模式,只有在低頻輸入信號(hào)的報(bào)頭序列波形與濾波器所設(shè)定的吻合時(shí),才能喚醒數(shù)字MCU。即當(dāng)有效低頻信號(hào)通過內(nèi)部電路解調(diào)并在PORT C口RC3引腳上輸出LFDATA數(shù)字信號(hào)時(shí),利用與RC3相連的PORT A口RA2引腳觸發(fā)中斷,才能喚醒休眠中的數(shù)字MCU。PIC16F639通過內(nèi)部SPI配置模擬前端。
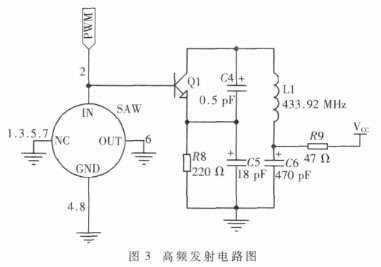
應(yīng)答器模塊的高頻發(fā)射電路如圖3所示。聲表面波諧振器SAW與功率放大器Q1構(gòu)成了一個(gè)開關(guān)鍵控高頻發(fā)射器。L1作為高頻發(fā)射器的天線,一般通過PCB上的金屬走線形成。系統(tǒng)需要發(fā)送的各種信息經(jīng)過Keeloq加密并PWM編碼后由RC5引腳輸出,當(dāng)輸出為高電平時(shí)驅(qū)動(dòng)發(fā)射電路工作;當(dāng)輸出為低電平時(shí),發(fā)射電路截止。
1.3 基站(車身)模塊設(shè)計(jì)
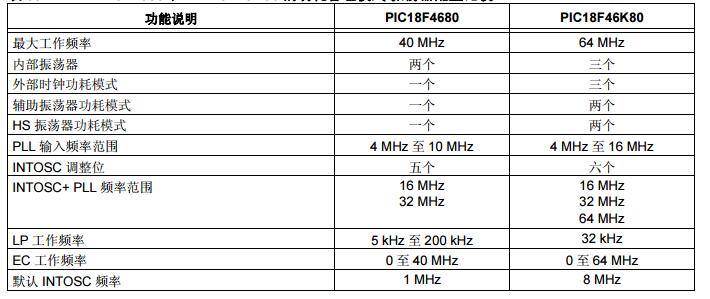
基站模塊由微控制器、高頻接收電路、低頻發(fā)射電路、液晶顯示電路及總線傳輸電路組成。基站模塊的微控制器采用微芯公司的PIC18F4680,工作頻率為40 MHz。該芯片擁有64 KB的Flash存儲(chǔ)器,1 KB的EEPROM存儲(chǔ)器及3.3 KB的SRAM存儲(chǔ)器;還擁有1個(gè)SPI接口、1個(gè)I2C接口、1個(gè)LIN接口及1個(gè)ECAN接口,完全可以滿足與汽車控制器進(jìn)行信息交換的要求,同時(shí)該芯片具有豐富的I/O資源,為配置液晶屏提供了可能,讓車主能夠及時(shí)了解基站模塊的工作情況。本文著重介紹高頻接收電路和低頻發(fā)射電路的設(shè)計(jì),其電路如圖4、圖5所示。
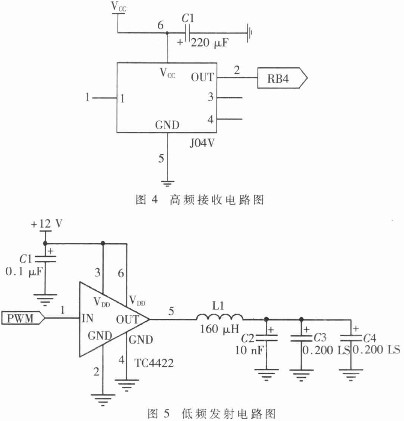
高頻接收電路采用安陽(yáng)市新世紀(jì)電子研究所的一款超再生接收模塊J04V。J04V是一款低功耗、小體積接收模塊,采用SMT工藝,性能穩(wěn)定,具有較好的靈敏度及性價(jià)比,可以廣泛應(yīng)用于需要長(zhǎng)期處于接收狀態(tài)的遙控報(bào)警及單片機(jī)數(shù)據(jù)傳輸系統(tǒng)。超再生模塊J04V集成度高,接線簡(jiǎn)單,接收到的高頻數(shù)字信號(hào)通過OUT引腳直接傳送到PIC18F4680的RB4引腳,觸發(fā)中斷,中斷程序進(jìn)行解碼操作,將編碼信號(hào)還原成原始數(shù)據(jù),從而通過總線控制相關(guān)指令執(zhí)行機(jī)構(gòu)動(dòng)作。
低頻發(fā)射電路由一個(gè)TC4422功率放大器和一個(gè)LC串聯(lián)諧振電路組成。在PKE系統(tǒng)中,低頻信號(hào)的發(fā)射和接收通過電磁感應(yīng)進(jìn)行通信,當(dāng)?shù)皖l功放驅(qū)動(dòng)器的電流為500 mA左右時(shí)可以獲得較好的傳送距離,而為了提高輸出回路品質(zhì)因數(shù)Q,低頻功放驅(qū)動(dòng)器的輸出阻抗必須在10 Ω以下,因此選用TC4422功率放大器。當(dāng)LC串聯(lián)諧振電路的諧振頻率與PWM信號(hào)的頻率一致時(shí),通過L1的負(fù)載電流最大,從而產(chǎn)生很強(qiáng)的磁場(chǎng),此時(shí)發(fā)送信號(hào)強(qiáng)度最大。
2 系統(tǒng)軟件設(shè)計(jì)
2.1 Keeloq編碼的實(shí)現(xiàn)
Keeloq實(shí)際上是一個(gè)“ASIC”的特別設(shè)計(jì),內(nèi)含加密及解密技術(shù),適用于遙控或命令辨別的應(yīng)用場(chǎng)合,如安全鎖、車庫(kù)門遙控、秘密通信、軟件保護(hù)等。Keeloq加密算法其實(shí)是一種非線性的數(shù)學(xué)推算公式,當(dāng)輸入數(shù)據(jù)經(jīng)過該算法加密后,輸出數(shù)據(jù)對(duì)輸入數(shù)據(jù)而言就是唯一的。在標(biāo)準(zhǔn)加密模式下,編碼密碼是由制造商代碼與序號(hào)利用解碼算法共同產(chǎn)生的,用于產(chǎn)生跳碼,儲(chǔ)存于微控制器的EEPROM中。Keeloq編碼過程如圖6所示。
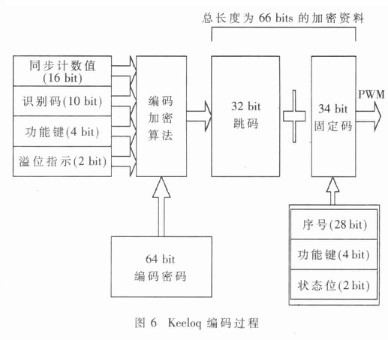
每當(dāng)應(yīng)答器的按鍵按下時(shí),PIC16F639便將一組66 bit的加密資料以PWM編碼的方式通過高頻發(fā)射器傳送出去。這66 bit的加密資料包含34 bit的固定碼與32 bit的跳碼。其中34 bit的固定碼包括28 bit的序號(hào)、4 bit的功能鍵以及2 bit的狀態(tài)位。4 bit功能鍵表明了應(yīng)答器中哪一個(gè)按鍵已被車主按下,而基站必須根據(jù)不同的功能鍵數(shù)值執(zhí)行相應(yīng)的命令。
基站接收到66 bit的加密資料后,首先檢查固定碼中的序號(hào)是否與存儲(chǔ)在EEROM中的序號(hào)是否一致,然后運(yùn)行解密算法,得到識(shí)別碼、同步計(jì)數(shù)值、功能鍵、溢位。PIC18F4680先將解碼后的識(shí)別碼與固定碼中序號(hào)的低10位進(jìn)行比較,看是否相等;然后比較解碼后的功能鍵數(shù)值與固定碼中的功能鍵數(shù)值;最后判斷解碼后的同步計(jì)數(shù)值與EEPROM中的舊的同步計(jì)數(shù)值是否合理增加。如果有一個(gè)步驟發(fā)生錯(cuò)誤,微控制器則判定接收到的是一組不合法的資料,不會(huì)進(jìn)行下一步動(dòng)作。
2.2 通信協(xié)議
通信在不同的環(huán)境下有不同的解釋,在出現(xiàn)電波傳遞通信后通信(Communication)被單一解釋為信息的傳遞,是指由一地向另一地進(jìn)行信息的傳輸與交換,其目的是傳輸消息。然而,通信是在人類實(shí)踐過程中隨著社會(huì)生產(chǎn)力的發(fā)展對(duì)傳遞消息的要求不斷提升使得人類文明不斷進(jìn)步。在各種各樣的通信方式中,利用“電”來傳遞消息的通信方法稱為電信(Telecommunication),這種通信具有迅速、準(zhǔn)確、可靠等特點(diǎn),且?guī)缀醪皇軙r(shí)間、地點(diǎn)、空間、距離的限制,因而得到了飛速發(fā)展和廣泛應(yīng)用;在現(xiàn)今因電波的快捷性使得從遠(yuǎn)古人類物質(zhì)交換過程中就結(jié)合文化交流與實(shí)體經(jīng)濟(jì)不斷積累進(jìn)步的實(shí)物性通信(郵政通信)被人類理解為制約經(jīng)濟(jì)發(fā)展的阻礙。
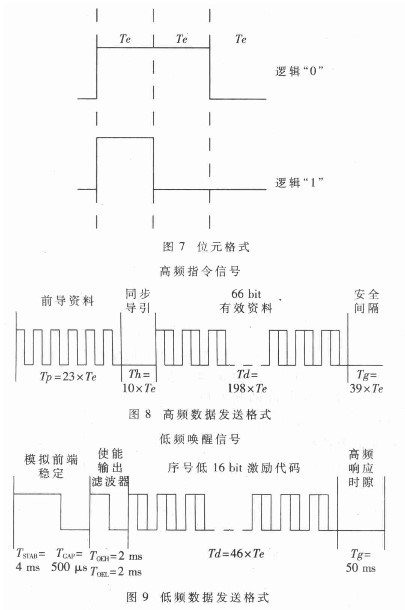
基站與應(yīng)答器之間的通信采用PWM編碼方式進(jìn)行半雙工通信。1個(gè)數(shù)據(jù)由3個(gè)位元組成,位元周期Te一般取100 μs~400μs,其格式如圖7所示。延時(shí)一個(gè)Te時(shí)間取樣并判斷,如果為高電平1則接收資料失敗,最后等待下一個(gè)上升沿的到來,如等待時(shí)間超過一個(gè)Te則接收資料失敗。依此循環(huán),直到資料全部接受完畢。高頻與低頻數(shù)據(jù)發(fā)送格式如圖8、圖9所示。
2.3 流程圖
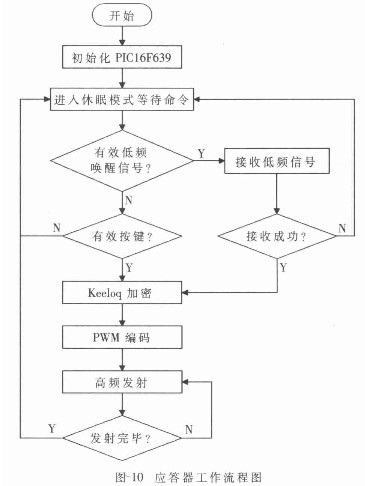
應(yīng)答器工作流程圖如圖10所示。
本文介紹了PKE智能鑰匙系統(tǒng)的總體設(shè)計(jì)方案,給出了詳盡的硬件電路及軟件設(shè)計(jì)。實(shí)踐證明該系統(tǒng)體積小、功耗低、通信良好、安全性強(qiáng)、應(yīng)用市場(chǎng)廣闊,有著很大的實(shí)用價(jià)值。
-
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44525瀏覽量
633260 -
汽車電子
+關(guān)注
關(guān)注
3024文章
7883瀏覽量
166552 -
無線
+關(guān)注
關(guān)注
31文章
5437瀏覽量
173103
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
請(qǐng)教PIC18F4680單片機(jī)與DS12C887時(shí)基電路接口技術(shù)
microchip被動(dòng)無鑰門禁(PKE) 參考設(shè)計(jì)
帶PIC18F4680的ILI9341 LCD能使用嗎?
PIC16F639上的SPI端口也可以用來連接外部設(shè)備嗎?
怎么用PIC18F4680打開一個(gè)LED?
PIC18F452/PIC18F442中文資料 (閃存單片機(jī)
基于PIC18F458單片機(jī)的LCD顯示
PKE智能鑰匙系統(tǒng)設(shè)計(jì)

基于PIC16F639 MCU實(shí)現(xiàn)智能PKE 應(yīng)答器的電路設(shè)計(jì)



被動(dòng)無鑰門禁(PKE)系統(tǒng)升級(jí)參考設(shè)計(jì)的詳細(xì)中文資料概述
PIC18FXX80到PIC18FXXK80的移植指南
使用PIC16F639 MCU實(shí)現(xiàn)智能PKE的系統(tǒng)設(shè)計(jì)詳細(xì)資料概述






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論