") 在TinyOS組件架構(gòu)基礎(chǔ)上實(shí)現(xiàn)CC2430芯片的節(jié)點(diǎn)定位設(shè)計(jì)
在TinyOS組件架構(gòu)基礎(chǔ)上實(shí)現(xiàn)CC2430芯片的節(jié)點(diǎn)定位設(shè)計(jì)
無線傳感器網(wǎng)絡(luò)是由分布在給定區(qū)域內(nèi)大量傳感器節(jié)點(diǎn)以無線自組織多跳的通信方式構(gòu)成的網(wǎng)絡(luò)系統(tǒng),目前在環(huán)境監(jiān)測保護(hù)、樓宇監(jiān)控、家庭安防、醫(yī)療護(hù)理、目標(biāo)跟蹤、軍事等領(lǐng)域已獲得了廣泛的應(yīng)用。
1、 CC2430芯片介紹
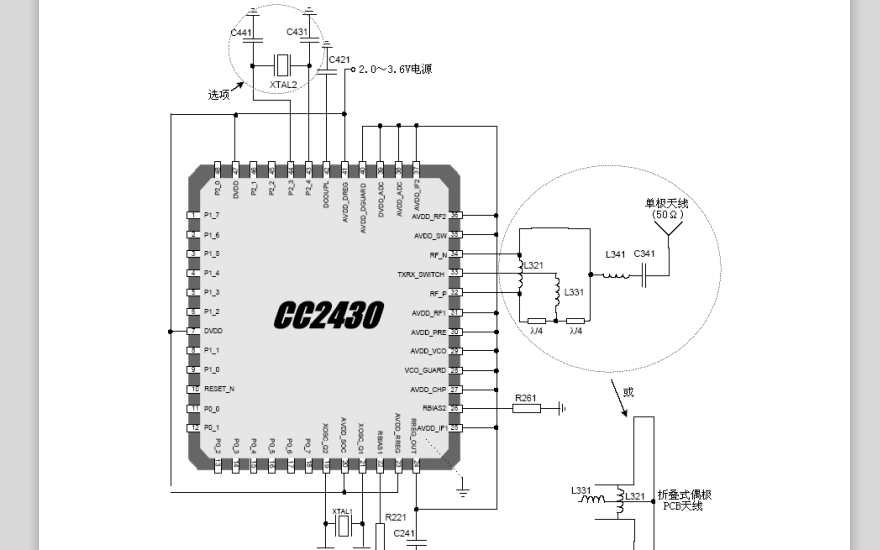
CC2430芯片是TI/Chipcon公司生產(chǎn)的真正意義上的片上系統(tǒng)(SOC)級解決方案,它集增強(qiáng)型工業(yè)標(biāo)準(zhǔn)8051核心、優(yōu)秀的射頻芯片CC24 20、強(qiáng)大的外圍資源于一體。集成的外設(shè)資源主要有DMA、定時(shí)/計(jì)數(shù)器、看門狗定時(shí)器、AES-128協(xié)處理器、8通道8~14位ADC、USART、休眠模式定時(shí)器、復(fù)位電路及21個(gè)可編程I/O,支持IEEE802.15.4和ZigBee協(xié)議。
CC2430芯片具有性能高、功耗低、接收靈敏度高、抗干擾性強(qiáng)、硬件CSMA/CA支持、數(shù)字化RSSI/LQI支持、DMA支持等特點(diǎn),支持無線數(shù)據(jù)傳輸率高達(dá)250 kbps.
2 、TinyOS系統(tǒng)與nesC語言
由于無線傳感器網(wǎng)絡(luò)的特殊性,需要操作系統(tǒng)能夠高效地使用傳感器節(jié)點(diǎn)的有限內(nèi)存、低功耗處理器、多樣傳感器、有限的電源,并且能對各種特定應(yīng)用提供最大的支持。
基于此,UC Berkeley研究人員專為嵌入式無線傳感器網(wǎng)絡(luò)開發(fā)出TinyOS系統(tǒng),目前已經(jīng)成為無線傳感器網(wǎng)絡(luò)領(lǐng)域事實(shí)上的標(biāo)準(zhǔn)平臺(tái)。 TinyOS系統(tǒng)具有組件化編程、事件驅(qū)動(dòng)模式、輕量級線程技術(shù)、主動(dòng)消息通信技術(shù)等特點(diǎn)。TinyOS采用組件架構(gòu)方式,快速實(shí)現(xiàn)各種應(yīng)用,組件包括網(wǎng)絡(luò)協(xié)議、分布式服務(wù)、傳感器驅(qū)動(dòng)以及數(shù)據(jù)獲取工具等,一個(gè)完整的應(yīng)用系統(tǒng)通過組合不同的組件來實(shí)現(xiàn)。采用事件驅(qū)動(dòng)的運(yùn)行模型,可以處理高并發(fā)性的事件,并實(shí)現(xiàn)節(jié)能。
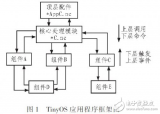
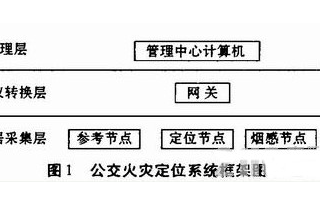
TinyOS應(yīng)用程序通常由頂層配件、核心處理模塊和其它組件構(gòu)成。每個(gè)應(yīng)用程序有且僅有一個(gè)頂層配件,組件間通過接口進(jìn)行連接通信,下層組件提供接口,通過provideinterface interfaceName來聲明,上層組件使用接口,通過useinterface interfaceName來聲明。接口提供兩類函數(shù),分別是命令(command)函數(shù)與事件(event)函數(shù),上層組件向下層組件發(fā)出命令,啟動(dòng)下層組件的功能:下層組件完成相應(yīng)的功能后向上層組件報(bào)告事件。應(yīng)用程序總體框架如圖1所示。
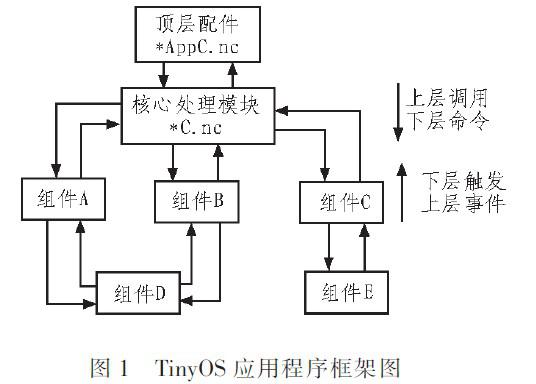
TinyOS系統(tǒng)本身以及應(yīng)用程序都是采用nesC語言編寫,nesC語言是對C語言的擴(kuò)展,具有類似于C語言的語法,但支持TinyOS的并發(fā)模型,同時(shí)具有組件化機(jī)制,能夠與其他組件連接在一起從而形成一個(gè)魯棒性很好的嵌入式系統(tǒng)。nesC語言把組件化/模塊化的編程思想和基于事件驅(qū)動(dòng)的執(zhí)行模型緊密結(jié)合起來。應(yīng)用nesC語言能夠更快速方便地編寫基于TinyOS的應(yīng)用程序。
3、 RSSI定位原理
RSSI全稱Received Signal Strength Indicator(接收信號強(qiáng)度指示),是一種基于距離的定位算法。RSSI原理是已知發(fā)射節(jié)點(diǎn)的發(fā)射信號強(qiáng)度,接收節(jié)點(diǎn)根據(jù)接收信號的強(qiáng)度,計(jì)算出信號在傳播過程中的損耗,利用理論和經(jīng)驗(yàn)?zāi)P蛯鬏敁p耗轉(zhuǎn)化為距離,再根據(jù)接收節(jié)點(diǎn)的已知位置利用三邊測量法計(jì)算出發(fā)射節(jié)點(diǎn)的位置。由于該方法不需要額外的硬件設(shè)備,是一種低功耗廉價(jià)的測距技術(shù),因此在很多項(xiàng)目中得到了廣泛的應(yīng)用。
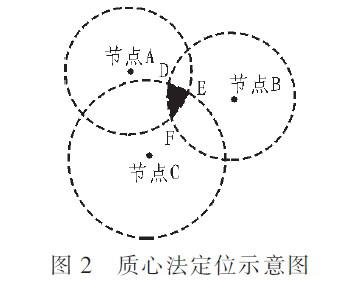
本文在RSSI定位基礎(chǔ)上使用質(zhì)心算法提高定位精度,如圖2所示,最后求得的盲節(jié)點(diǎn)坐標(biāo)為點(diǎn)D、E和F組成的三角形的質(zhì)心。
4 、定位算法在TinyOS中的實(shí)現(xiàn)
根據(jù)RSSI測距原理,要確定盲節(jié)點(diǎn)的位置,至少需要三個(gè)錨節(jié)點(diǎn)(已知位置的接收節(jié)點(diǎn)),并需要一個(gè)匯聚節(jié)點(diǎn)來傳輸各錨節(jié)點(diǎn)的RSSI寄存器值到PC機(jī),最終通過串口調(diào)試助手來顯示結(jié)果并進(jìn)一步定位盲節(jié)點(diǎn)坐標(biāo)。下面分別介紹移動(dòng)盲節(jié)點(diǎn)、靜態(tài)錨節(jié)點(diǎn)以及匯聚節(jié)點(diǎn)的實(shí)現(xiàn)流程。
4.1 盲節(jié)點(diǎn)
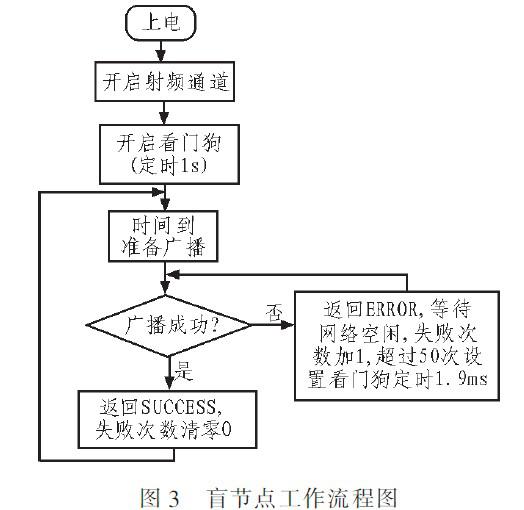
盲節(jié)點(diǎn)的主要任務(wù)是向所有錨節(jié)點(diǎn)廣播信息,具體的流程如圖3所示。
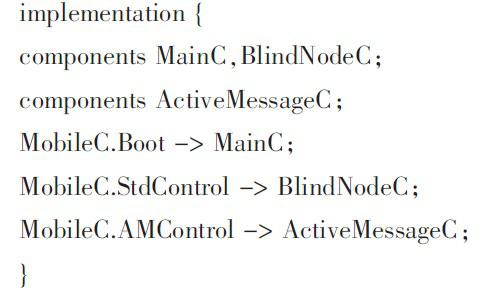
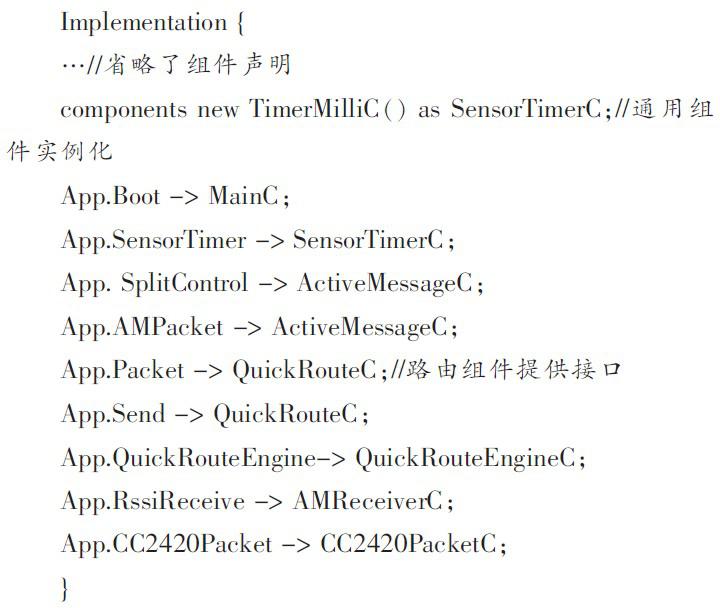
Tiny OS程序頂層配件主體如下:
4.2 靜態(tài)錨節(jié)點(diǎn)
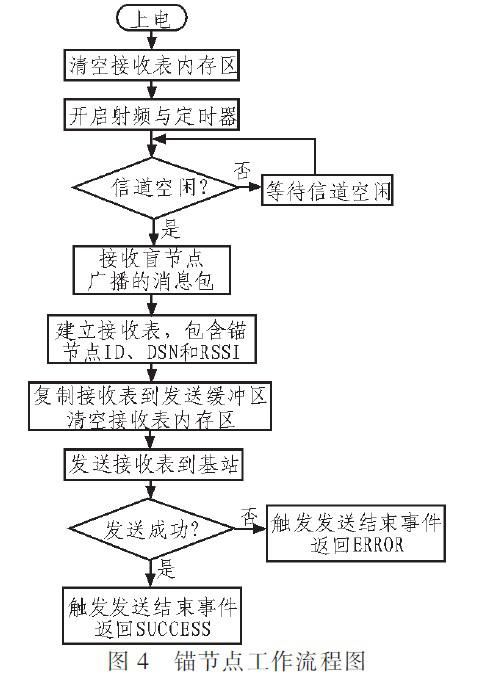
錨節(jié)點(diǎn)主要功能是接收盲節(jié)點(diǎn)的廣播信息,然后提取RSSI寄存器中的值,通過路由層發(fā)送接口轉(zhuǎn)發(fā)給匯聚節(jié)點(diǎn),或轉(zhuǎn)發(fā)其它錨節(jié)點(diǎn)的數(shù)據(jù)給匯聚節(jié)點(diǎn)。主要實(shí)現(xiàn)流程如圖4所示。
錨節(jié)點(diǎn)的組件連接如下:
靜態(tài)錨節(jié)點(diǎn)通過CC2420Packet接口來獲取RSSI值,具體函數(shù)如下:
rssi=((int)call CC2420Paeket.getRssi(msg));
4.3 匯聚節(jié)點(diǎn)
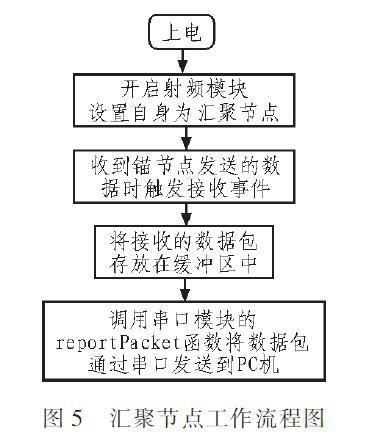
匯聚節(jié)點(diǎn),也稱為基站,主要負(fù)責(zé)接收各錨節(jié)點(diǎn)發(fā)送的接收表信息,包括錨節(jié)點(diǎn)ID、DSN和RSSI,并將這些數(shù)據(jù)包通過串口轉(zhuǎn)發(fā)到PC機(jī)。具體流程如圖5所示。
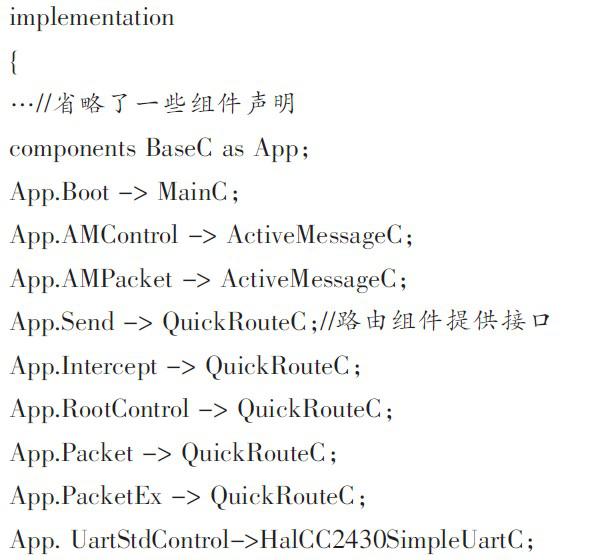
匯聚節(jié)點(diǎn)組件連接如下:

4.4 程序移植與實(shí)驗(yàn)結(jié)果
本實(shí)驗(yàn)在Cygwin平臺(tái)下進(jìn)行編譯與移植,編譯過程如圖6所示。

圖6 TinyOS編譯流程圖
進(jìn)入Cygwin環(huán)境,切換到TinyOS定位程序目錄下,輸入編譯移植命令:
make cc2430em install NID=0x GRP=00
其中NID是節(jié)點(diǎn)號,是節(jié)點(diǎn)的身份標(biāo)識,同一網(wǎng)絡(luò)中的節(jié)點(diǎn)號必須惟一;GRP是網(wǎng)絡(luò)號,同一網(wǎng)絡(luò)中所有節(jié)點(diǎn)的網(wǎng)絡(luò)號必須一致。
在所有節(jié)點(diǎn)的TinyOS移植完畢后,啟動(dòng)所有節(jié)點(diǎn),應(yīng)用串口調(diào)試助手顯示匯聚節(jié)點(diǎn)發(fā)送到PC機(jī)的RSSI數(shù)據(jù),數(shù)據(jù)結(jié)構(gòu)如圖7所示,其中1~7個(gè)字節(jié)數(shù)據(jù)為信息包的包頭,8~9兩字節(jié)為中繼錨節(jié)點(diǎn)的節(jié)點(diǎn)號,10~11兩字節(jié)為源錨節(jié)點(diǎn)的節(jié)點(diǎn)號,12~13字節(jié)為源錨節(jié)點(diǎn)到匯聚節(jié)點(diǎn)的跳數(shù),14~15字節(jié)為盲節(jié)點(diǎn)的節(jié)點(diǎn)號,21~22兩字節(jié)數(shù)據(jù)為錨節(jié)點(diǎn)的RSSI值。
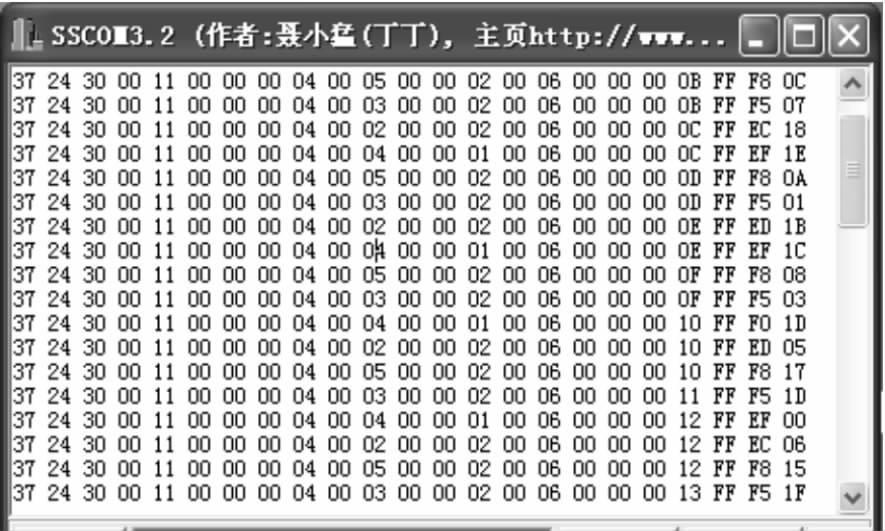
圖7 錨節(jié)點(diǎn)RSSI值
在確定PC機(jī)能夠正確接收各錨節(jié)點(diǎn)的RSSI值后,還需要選取合適的RSSI測距信號衰減模型,將RSSI值轉(zhuǎn)化為距離。本實(shí)驗(yàn)中采用在無線信號傳輸中應(yīng)用廣泛的對數(shù)--常態(tài)模型,如式(1)所示:
RSSI=-(10n·lg(d)+A)+45 (1)
其中A為盲節(jié)點(diǎn)與錨節(jié)點(diǎn)相距1米時(shí)RSSI的絕對值,本實(shí)驗(yàn)中測得A≈40,n為無線信號傳播指數(shù),一般取2~4,經(jīng)過多次試驗(yàn)取3.0較為合適。將本模型應(yīng)用在所測得的RSSI中,并對比實(shí)際距離得到如表1和圖8所示結(jié)果:表1中d為RSSI理論模型所得距離,D為實(shí)際測量結(jié)果。
表1 RSSI值與距離的轉(zhuǎn)換
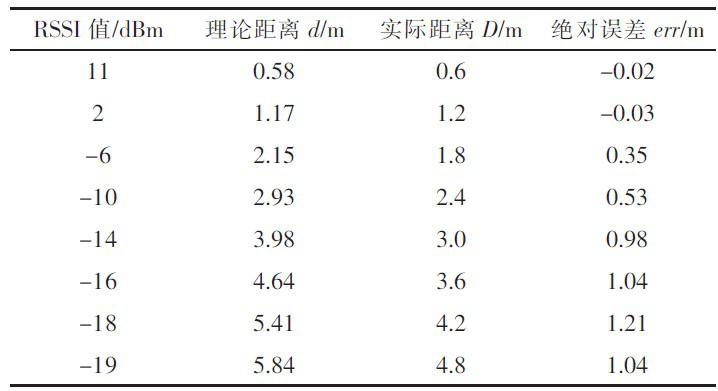
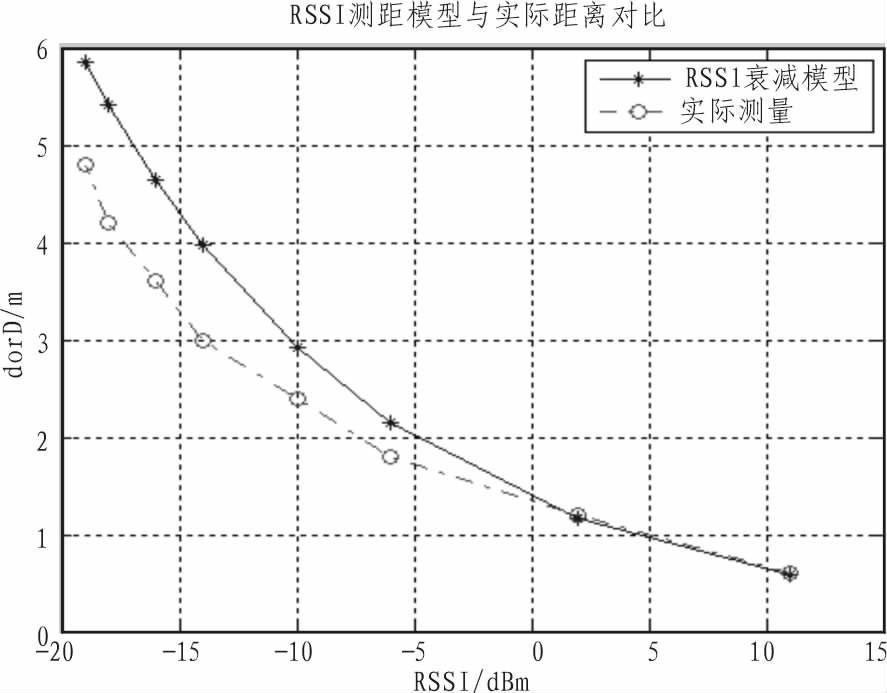
圖8 RSSI測距模型驗(yàn)證
在實(shí)驗(yàn)室環(huán)境下布置了4個(gè)錨節(jié)點(diǎn)、1個(gè)匯聚節(jié)點(diǎn)和1個(gè)盲節(jié)點(diǎn),4個(gè)錨節(jié)點(diǎn)分布在4.8x3.6 m2矩形的4個(gè)點(diǎn),盲節(jié)點(diǎn)位于矩形區(qū)域內(nèi),匯聚節(jié)點(diǎn)在矩形區(qū)域外。
讀取如圖7所示的各錨節(jié)點(diǎn)RSSI值,在Matlab環(huán)境下通過對數(shù)--常態(tài)傳播模型將RSSI值轉(zhuǎn)變?yōu)榫嚯x,最后通過質(zhì)心算法對盲節(jié)點(diǎn)進(jìn)行定位,計(jì)算出盲節(jié)點(diǎn)的坐標(biāo)。在實(shí)驗(yàn)中采用10次測量取平均值來減小定位誤差,并計(jì)算對比盲節(jié)點(diǎn)理論坐標(biāo)與實(shí)際坐標(biāo)的誤差,得到如圖9所示的定位結(jié)果。
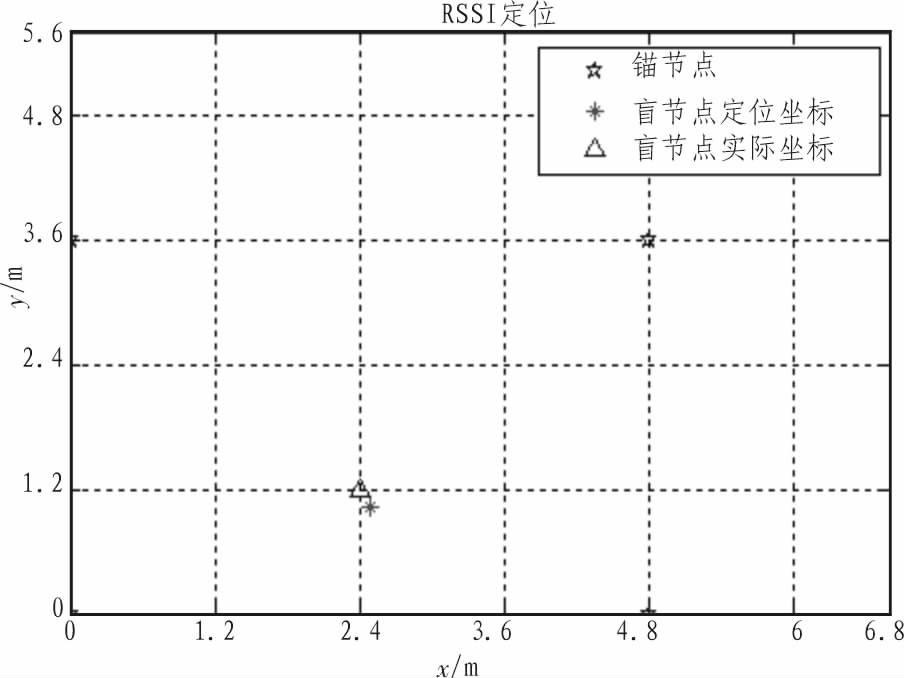
圖9 RSSI定位結(jié)果
通過定位算法計(jì)算出的盲節(jié)點(diǎn)坐標(biāo)為(2.483 1,1.018 5),實(shí)際盲節(jié)點(diǎn)坐標(biāo)為(2.4,1.2),誤差為0.199 6 m,基本實(shí)現(xiàn)了對盲節(jié)點(diǎn)的定位。
5、 結(jié)論
本文在TinyOS操作系統(tǒng)下實(shí)現(xiàn)了基于CC2430模塊的RSSI定位,分析了盲節(jié)點(diǎn)、錨節(jié)點(diǎn)和匯聚節(jié)點(diǎn)的工作流程,確定了實(shí)驗(yàn)室條件下無線傳輸模型Shadowing模型參數(shù),最后利用Matlab計(jì)算出盲節(jié)點(diǎn)坐標(biāo)。定位結(jié)果顯示,通過定位算法所得的盲節(jié)點(diǎn)坐標(biāo)與實(shí)際坐標(biāo)誤差為0.199 6 m,可滿足大多數(shù)無線傳感器網(wǎng)絡(luò)對節(jié)點(diǎn)定位的要求。
責(zé)任編輯:gt
-
電源
+關(guān)注
關(guān)注
184文章
17605瀏覽量
249560 -
芯片
+關(guān)注
關(guān)注
454文章
50460瀏覽量
421971 -
無線傳感器
+關(guān)注
關(guān)注
15文章
770瀏覽量
98316
發(fā)布評論請先 登錄
相關(guān)推薦
CC2430與CC2530的硬件上的區(qū)別
基于TinyOS操作系統(tǒng)的I/O控制
CC2430的無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)如何進(jìn)行設(shè)計(jì)
基于ZigBee技術(shù)的射頻芯片CC2430
基于TinyOS的CC2430無線數(shù)據(jù)收發(fā)設(shè)計(jì)
基于CC2430的無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)設(shè)計(jì)
基于TinyOS的CC2430 RSSI定位的設(shè)計(jì)

基于CC2430的無線傳感器網(wǎng)絡(luò)的實(shí)現(xiàn)
在TinyOS操作系統(tǒng)下實(shí)現(xiàn)基于CC2430模塊的RSSI定位
TinyOS下CC2430單片機(jī)的ADC使用方法詳細(xì)說明
CC2430 SoC系統(tǒng)芯片的數(shù)據(jù)手冊免費(fèi)下載
通過采用CC2430芯片實(shí)現(xiàn)公交火災(zāi)快速定位系統(tǒng)設(shè)計(jì)解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論