 地面數字電視接收機幀與載波的同步模塊設計與仿真
地面數字電視接收機幀與載波的同步模塊設計與仿真
1 引言
中國于2006年8月頒布了數字電視的地面廣播標準GB20600-2006,成為繼美國ATSC、歐洲DVB-T、日本ISDB-T之后又一重要的地面數字電視廣播的國家標準。GB20600-2006中對中國數字電視地面傳輸(DigitalTerrestrial Television Broadcasting,DTTB)系統傳輸的幀結構、信道編碼和調制作了具體的規定。其中幀結構的基本單元——信號幀采用了循環擴展的時域幀頭結構,即在每3780個符號的幀體前加入一定長度的經循環擴展后的偽隨機序列作為幀頭,為系統提供同步和信道估計。本文提出一種接收機同步算法的實現結構,利用已知的時域幀頭,聯合進行幀同步和載波同步,減少了載波偏差對符號同步的干擾。同時對該結構進行了FPGA實現,以驗證其可行性和復雜度。
2 系統模型及基本算法介紹
2.1 國標系統的信號幀結構
國標系統的數據幀是一種4層結構,其中的信號幀是系統幀結構的基本單元。如圖1所示,它包含幀體和幀頭2個部分。幀體部分有3 780個符號,持續時間為500μs,包含了傳送的數據符號和一些系統信息。幀頭為m偽隨機序列(PN序列),長度視系統采用的幀頭模式而定。幀頭的序列相對于接收端是已知的,因此可以用來實現接收機的同步和信道估計等算法。
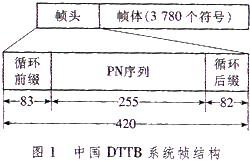
幀頭部分的長度和內容在不同模式下有不同的規定,但總體結構是相似的。這里僅例舉模式1說明幀頭的結構。在模式1中,幀頭長度是420個符號,由一個83個符號長度的前同步段、一個PN255序列和一個82個符號長度的后同步段構成,前同步段和后同步段定義為PN255序列的循環擴展。
2.2 針對時域幀頭的常用同步算法
2.2.1 符號同步算法
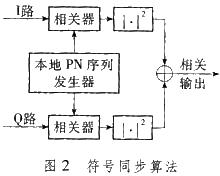
在已知的PN序列作為幀頭的系統中,常用的符號同步算法是將接收信號與本地PN序列時域相關,然后在相關的結果中尋找峰值。具體的實現結構見圖2。
由于國標系統的幀頭具有循環擴展結構,在存在多徑信道環境的情況下,幀頭信號與本地PN序列滑動相關的結果近似為信道的數字域等效的沖激響應。因此可以根據預先制定的規則,選擇其中的一條多徑作為開窗位置的參考徑。通常的做法是針對相關結果給定一個門限,相關值超過門限的第一條多徑作為開窗起始位置的參考徑。此做法的好處是可把能量較大的徑的信號包含在開窗范圍內,減少符號間干擾(ISI),同時又能夠忽略掉一些能量較小的前徑。
2.2.2 載波一般估計和精細估計算法
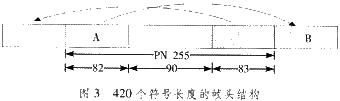
在圖3所示的國標系統的幀頭中,PN序列的前后端分別加入了循環擴展。即每幀幀頭的第83~165個符號的區域A,與第338~420個符號的區域B發送的是相同的信號,同步模塊可利用這一循環結構估計載波頻偏。
假設接收信號為

式中:l表示第l幀的符號;n表示幀內的第n個符號;s是發端信號;△F是歸一化載波頻率誤差;N表示一幀的幀體符號數;Ns表示一幀的符號數。
A段幀頭符號和B段幀頭符號做互相關得
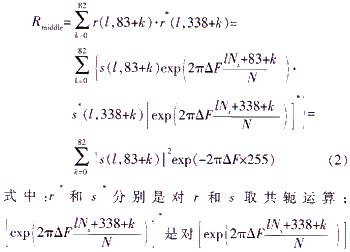
取共軛運算。互相關的結果Rmiddle經過取角度運算,即可提取出載波頻率誤差△F。
同樣,精細估計部分利用前后相鄰兩幀的幀頭做互相關,得到
式中:LEN表示相關窗的寬度;Ns=4 200。
2.3 傳統符號同步和載波同步算法的局限性
傳統符號同步方法主要利用了PN序列良好的自相關特性,本地PN序列與幀頭相關后會得到一個尖銳的相關峰,可以根據這一相關峰的位置來定位幀頭。但當接收信號存在較大的載波偏差時,PN序列的自相關特性會遭到破壞,相關峰的幅度衰落。載波偏差越大,相關峰的幅度衰落越明顯,因此較大的載波偏差可能導致同步模塊無法精確地定位幀頭位置。
本文提出了一種符號同步和載波粗同步的聯合結構,減少了載波偏差對符號同步的干擾,又對載波偏差進行初步糾正,把剩余偏差控制在載波一般估計的范圍內。
3 聯合同步模塊架構與FPGA實現
3.1 硬件實現結構框圖
筆者提出的國標系統接收機同步模塊框圖見圖4。信號的捕獲和同步過程分為3個階段:
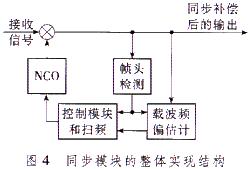
1) 掃頻符號同步階段。同步模塊先對接收到的數據進行掃頻,即載波同步模塊對數字振蕩器(NCO)先依次輸出預先給定的頻率,并在每個頻點上停留一段時間,以便相關和峰值檢測模塊能找到并跟蹤幀頭位置,如沒有出現相關峰則再掃描下一個頻點。
2) 一般估計階段。當相關和峰值檢測模塊成功獲取幀同步信息后,進入一般估計階段。由于掃頻模塊對載波偏差進行了初步糾正,剩余頻偏此時局限在一般估計的有效頻率范圍內,保證了一般估計的有效性。
3) 精細估計階段。當剩余頻偏在一個相對較小的范圍內時,控制模塊將轉為精細估計模式。精細估計的范圍比一般估計小,但是精度高于一般估計,因此可用來最終跟蹤載波頻偏。
3.2 掃頻符號同步模塊的實現
掃頻符號同步是一個掃描檢測反饋的過程,其具體實現結構如圖5,主要分為3個部分:
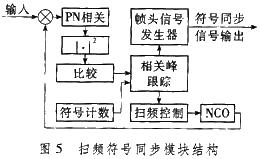
1) 檢測部分。包括相關器和峰值檢測模塊。相關器對接收信號進行與本地PN序列的滑動相關。峰值檢測模塊需要一個預先設置好的門限值,并把滑動相關結果與該門限值比較,如果出現相關值大于門限的情況則對與其間隔一幀的各個點的相關值進行跟蹤。如果持續3幀都出現大于門限,即判定為幀同步完成,并輸出一個幀同步信號。為了同時實現控制模塊的功能,峰值檢測模塊還要輸出一個峰值跟蹤信號給掃頻控制模塊。
2) 掃頻控制。其主要功能是控制掃描頻率。在模塊的ROM中依次存儲了被掃描的各個頻點的頻率值,控制模塊根據峰值檢測輸出的信號決定鎖定該頻點還是進入下一個頻點。為排除突發干擾的影響,對于每個頻點,掃頻模塊都應在該頻點停留一定的時間,以便相關檢測能夠正確地跟蹤幀頭。由于反饋環路存在延時,掃頻在每個頻點的停留時間應比幀頭檢測跟蹤時間要適當延長。
掃頻相鄰頻點的頻率間隔應小于載波一般估計的有效頻偏范圍,這樣保證載波估計模塊有效估計出掃頻后的剩余頻偏。相關檢測部分的門限也要與掃頻跨度相對應,使得當剩余頻偏大于掃頻間隔時系統無法檢測出大于門限的相關峰。
3) 載波偏差糾正。這里NCO采用累加器實現,輸入為估計的頻率,對該頻率進行累加(積分),即得到相位值。輸出的正弦波和余弦波通過查表實現。
3.3 載波一般估計和精細估計模塊
載波一般估計對剩余頻偏的有效估計范圍是,它需要系統確定幀頭位置。因此載波一般估計模塊在掃頻符號同步結束后就開始工作。
一般估計模塊的實現框圖如圖6。這里采用幀頭的A段與B段的相關估計載波頻偏。選擇A段和B段是因其位于幀頭相對靠后的位置,不容易受到影響。對于ISI比較嚴重的情況,因為接收信號被認為是零均值的隨機數,所以ISI也是零均值的隨機信號。這樣可用長的相關窗取平均的方法在一定程度上消除ISI干擾。為對前后信號做互相關運算,模塊需要1個RAM來存儲一段幀頭信號。由標準所規定的幀結構,循環后綴的長度為82個符號,因此這里RAM存儲不超過82個符號長度的數據。
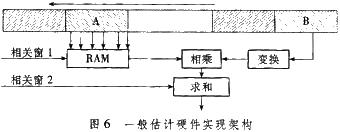
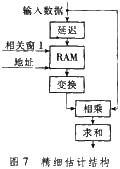
精細估計和一般估計同時進行,但只在一般估計跟蹤了載波頻偏一段時間,且剩余頻偏小于精細估計的最大范圍之后才開始輸出。精細估計對前后相鄰兩幀的幀頭做互相關,互相關的兩組數據間隔為幀長4 200。該模塊的實現可用一般估計已存儲在RAM中的上一幀A段數據與本幀A段數據進行相關。如圖6所示,當A段數據到來時,此時RAM中存儲的為上一幀A段的數據,因此可以讀出RAM中的數據,與接收到的信號做相關即可完成精細估計。具體實現結構如圖7,這里RAM是先讀后寫的,因此數據進入RAM有一個符號的延遲,這對算法并沒有影響。
3.4 控制掃頻模塊
控制模塊是同步部分最核心的模塊,其主要功能有:
1) 控制掃頻功能。包括掃頻頻率的輸出,掃頻點變換的控制;
2) 控制一般估計和精細估計的轉換。在一般估計模式中,對估計出的頻率與精細估計的頻率范圍作比較,如果發現估計的剩余頻偏一直處在精細估計的范圍內(例如連續5幀),則轉換為精細估計;
3)控制模塊還包括了反饋環路中的低通濾波器部分,對載波頻率的估計進行低通濾波和累加。
4 仿真及分析
在FPGA平臺上進行了基帶模塊的仿真以驗證其功能。用于仿真的接收數據中加入了21.17 kHz的載波偏差。仿真的環境見表1。
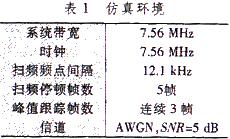
圖8說明了仿真的結果,其中,縱坐標為NCO的輸入頻率,橫坐標為經過的幀數。
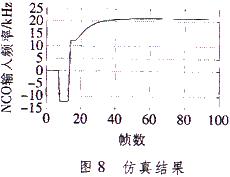
從圖8中可以看出,在同步模塊工作的初期,由于載波偏差過大,相關模塊無法找到相關峰。模塊通過掃頻、反饋環路與載波一般估計、精細估計的協同工作,跟蹤載波頻偏,同時掃頻幀同步還獲取了幀同步信息。由于硬件實現定點化計算精度有限,經過載波同步模塊的信號仍然會有少量的載波頻偏,這種偏差可通過后邊的相位鎖定或均衡器模塊糾正。
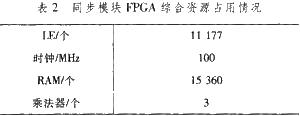
對本文提出的同步模塊架構通過FPGA實現并用Altera QuartusII軟件進行了仿真和綜合,資源的占用情況如表2。如果采用T/2或更高頻率的系統時鐘,幀頭檢測的相關器可以被I/Q兩路復用,大大減少資源占用。由于算法簡單,而且對數據的處理速度要求不高,因此該模塊具有占用資源少、運行頻率高等優點,完全滿足國標系統接收機的設計要求。
5 小結
本文基于中國地面數字電視國家標準提出的系統結構,設計了接收機幀同步與載波同步的聯合同步模塊,并對硬件實現中可能遇到的問題進行了討論。仿真證明,這種結構可有效解決幀同步與載波同步互相牽制的問題,準確獲取幀頭信息,且能對抗相對較大的載波頻率偏差。如果采用較高的計算精度,載波頻率跟蹤的準確性則可以得到保證。
-
FPGA
+關注
關注
1626文章
21667瀏覽量
601843 -
數字電視
+關注
關注
3文章
321瀏覽量
45228 -
廣播
+關注
關注
1文章
305瀏覽量
23035
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論