") 基于FPGA和SOPC的水聲信號(hào)采樣傳感器節(jié)點(diǎn)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
基于FPGA和SOPC的水聲信號(hào)采樣傳感器節(jié)點(diǎn)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
1 引言
近幾十年來,隨著世界各國(guó)對(duì)海洋開發(fā)和利用步伐的加快,對(duì)海洋信息進(jìn)行連續(xù)實(shí)時(shí)監(jiān) 測(cè)的意義越來越重要。水聲無線傳感器網(wǎng)絡(luò)(Underwater Acoustic sensor network,簡(jiǎn)稱 UW-ASN)是海洋環(huán)境立體監(jiān)測(cè)系統(tǒng)中的研究熱點(diǎn),它由大量具有計(jì)算和通信能力的傳感器 節(jié)點(diǎn)組成,各節(jié)點(diǎn)被分布在指定的海域,執(zhí)行連續(xù)的協(xié)同監(jiān)測(cè)任務(wù)。鑒于水聲信道的帶寬有 限、海洋噪聲復(fù)雜、具有多途效應(yīng)和多普勒效應(yīng)[1],這些特殊性給UW-ASN 中的水聲通信、 協(xié)議設(shè)計(jì)等方面帶來了很大的挑戰(zhàn),增加了傳感器網(wǎng)絡(luò)設(shè)計(jì)的復(fù)雜性。
為了充分了解水聲通信過程中的數(shù)據(jù)變化,方便對(duì)于信道特性分析以及通信方式的選 擇,以及大量傳感器網(wǎng)絡(luò)節(jié)點(diǎn)之間通信數(shù)據(jù)的存儲(chǔ),傳感器節(jié)點(diǎn)必須具備數(shù)據(jù)采集功能。傳 統(tǒng)的水聲數(shù)據(jù)采集存儲(chǔ)系統(tǒng)主要由數(shù)據(jù)采集板卡組成,能夠滿足數(shù)據(jù)采集功能,缺點(diǎn)是體積 大,便攜性差,難以作為傳感器節(jié)點(diǎn)的組成部分應(yīng)用于實(shí)際設(shè)計(jì)中。
本文針對(duì)這一問題,提出了基于SOPC(System On Programmable Chip)的設(shè)計(jì)方案,利 用其配置靈活、擴(kuò)展性強(qiáng)、接口豐富等優(yōu)點(diǎn),以Altera 公司的Cyclone II 系列FPGA 為基 礎(chǔ),設(shè)計(jì)傳感器節(jié)點(diǎn)數(shù)據(jù)采集存儲(chǔ)系統(tǒng),降低了設(shè)計(jì)的風(fēng)險(xiǎn),完善了傳感器節(jié)點(diǎn)功能要求。
2 采樣存儲(chǔ)系統(tǒng)概述
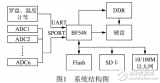
本設(shè)計(jì)系統(tǒng)的結(jié)構(gòu)如圖1 所示,在整個(gè)傳感器節(jié)點(diǎn)的系統(tǒng)當(dāng)中,將AD 芯片輸出的12 位數(shù)據(jù),通過設(shè)計(jì)SDRAM 控制IP 核,實(shí)現(xiàn)數(shù)據(jù)變速率AD 采集、數(shù)據(jù)環(huán)形存儲(chǔ)、數(shù)據(jù)環(huán) 形讀取、以及數(shù)據(jù)飛讀(實(shí)時(shí)數(shù)據(jù)讀取)等功能。同時(shí),對(duì)于NiosII CPU 設(shè)計(jì)串口(UART) 協(xié)議,以便前置機(jī)與傳感器節(jié)點(diǎn)通信,實(shí)現(xiàn)不同命令操作功能,方便對(duì)水聲試驗(yàn)過程中波形 數(shù)據(jù)的變化進(jìn)行仿真處理,以滿足試驗(yàn)要求。
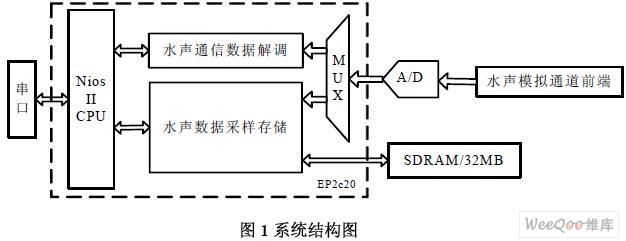
本設(shè)計(jì)采用 MICRO 公司的MT48LC32M8A2 型號(hào)容量為32Mbyte 的SDRAM,芯片地 址線為25 位,每個(gè)地址存儲(chǔ)16 位數(shù)據(jù)。根據(jù)水聲通信試驗(yàn)要求,聲波頻率為40KHz,每 個(gè)正弦波采樣16 個(gè)點(diǎn),則采樣時(shí)鐘要求至少640KHz,本系統(tǒng)設(shè)計(jì)采樣時(shí)鐘最大40MHz。 同時(shí),環(huán)形存儲(chǔ)深度最大為32Mbyte,每次采樣存儲(chǔ)數(shù)據(jù)占2byte,則至少可以采樣25 秒正 弦波數(shù)據(jù)。環(huán)形存儲(chǔ)區(qū)域大小,以及采樣時(shí)鐘都可以進(jìn)行參數(shù)化配置,能夠滿足試驗(yàn)要求。 系統(tǒng)整體分為硬件邏輯設(shè)計(jì),與軟件程序設(shè)計(jì)兩部分。
3 系統(tǒng)整體設(shè)計(jì)
3.1 硬件邏輯設(shè)計(jì)
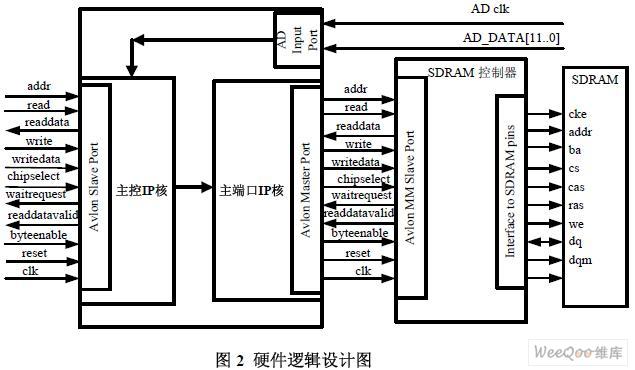
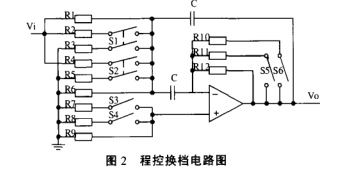
硬件邏輯設(shè)計(jì)主要包括主控IP 核設(shè)計(jì)與主端口IP 核設(shè)計(jì)兩部分工作,分別實(shí)現(xiàn)對(duì)于 AD 采樣數(shù)據(jù)的存儲(chǔ)和讀取時(shí)序控制,以及AVALON 總線的主端口建立的目的。硬件邏輯 利用IP 核模塊化,移植性好的特點(diǎn),方便整合到傳感器節(jié)點(diǎn)的整體設(shè)計(jì)當(dāng)中。作為傳感器 節(jié)點(diǎn)的組成部分,為水聲通信試驗(yàn)的順利進(jìn)行提供可靠保證。 硬件邏輯設(shè)計(jì)圖,如圖 2 所示。
3.1.1 SDRAM 主控IP 核設(shè)計(jì)
主控IP 核通過對(duì)于QuartusII 自帶的SDRAM 控制器進(jìn)行控制,實(shí)現(xiàn)變速率AD 采樣的 功能,以及讀寫SDRAM 的邏輯功能。由于SDRAM 控制器實(shí)現(xiàn)了對(duì)于SDRAM 芯片的時(shí) 序操作,所以讀寫時(shí)序設(shè)計(jì)是針對(duì)SDRAM 控制器進(jìn)行[3]。
系統(tǒng)讀 SDRAM 操作分為數(shù)據(jù)飛讀與數(shù)據(jù)環(huán)形讀取兩種功能[4]。其中,數(shù)據(jù)飛讀是將當(dāng)前AD 采樣值送回至CPU,并通過串口返回到前置機(jī),方便實(shí)時(shí)數(shù)據(jù)監(jiān)控。對(duì)于數(shù)據(jù)環(huán)形 讀取SDRAM 操作,通過設(shè)置首地址指針寄存器,在每次寫操作之后自動(dòng)加一,實(shí)現(xiàn)環(huán)形 存儲(chǔ)水聲通信數(shù)據(jù)的目的。在每次環(huán)形數(shù)據(jù)讀取操作發(fā)起之前,預(yù)讀首地址指針寄存器,以 此為起始地址,始終讀取最新時(shí)刻的采樣存儲(chǔ)數(shù)據(jù)。 讀操作過程主要狀態(tài)機(jī),如圖 3 所示。
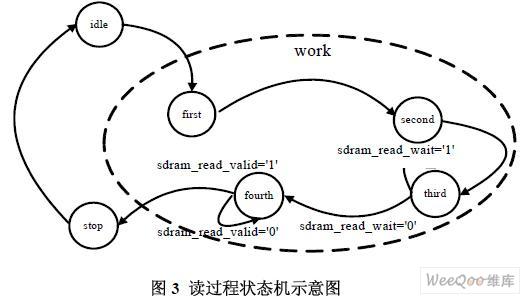
其中 work 過程包含的獨(dú)立狀態(tài)機(jī),由如下四部分構(gòu)成:
(1)first:片選有效,讀使能有效,送讀SDRAM 地址。
(2)second:讀使能有效,滿足SDRAM 控制器讀時(shí)序要求。
(3)third:判斷sdram_read_wait 信號(hào)值,如果為1,則維持當(dāng)前狀態(tài),同時(shí)讀使能信號(hào)置位;如果為0,則進(jìn)入下一狀態(tài)。
(4)fourth:判斷sdram_read_valid 信號(hào)值,如果為0,則維持當(dāng)前狀態(tài);如果為1,將讀回?cái)?shù)據(jù)寫入讀SDRAM 數(shù)據(jù)寄存器,同時(shí)讀使能信號(hào)復(fù)位。
變速率AD 采集與數(shù)據(jù)環(huán)形存儲(chǔ)操作主要是由主控IP 核寫SDRAM 的過程實(shí)現(xiàn)。為保 持采樣時(shí)刻數(shù)據(jù)的穩(wěn)定性,系統(tǒng)對(duì)AD 時(shí)鐘進(jìn)行分頻,通過設(shè)置不同分頻寄存器,實(shí)現(xiàn)變速 率采樣的目的。數(shù)據(jù)環(huán)形存儲(chǔ)SDRAM 操作是靠每次分頻時(shí)鐘SDRAM_WRITE_CLK 的上 升沿觸發(fā),基本時(shí)序過程與讀過程狀態(tài)機(jī)類似。系統(tǒng)從0 地址開始寫操作,一旦寫滿預(yù)設(shè)存 儲(chǔ)區(qū)域,則從下一寫時(shí)刻開始,數(shù)據(jù)寫入初始地址,以此類推,實(shí)現(xiàn)環(huán)形存儲(chǔ)操作。同時(shí), 讀寫操作不能進(jìn)行同時(shí)進(jìn)行,通過讀寫選擇控制器的設(shè)置,分別按照不同狀態(tài)進(jìn)行操作。
3.1.2 主端口IP 核
因?yàn)镾DRAM 主控IP 核在NiosII 軟核CPU 總線控制下作為從端口,所以不能主動(dòng)發(fā)起 讀寫操作,因此必須新建第二條AVALON 總線,設(shè)計(jì)讀寫主端口IP 核,才能實(shí)現(xiàn)讀寫外接 SDRAM 芯片的功能。主端口IP 核的時(shí)序操作,是對(duì)主控IP 核的時(shí)序轉(zhuǎn)接,面向SDRAM 控制器進(jìn)行控制。根據(jù)讀寫使能信號(hào)不同,進(jìn)行不同時(shí)序傳送。
3.2 軟件程序設(shè)計(jì)
NiosII CPU 作為軟核,可方便進(jìn)行模塊化操作,具有可移植,可配置,易整合的特點(diǎn)。 在本設(shè)計(jì)當(dāng)中,軟件設(shè)計(jì)主要實(shí)現(xiàn)以下五種主要功能:?jiǎn)吸c(diǎn)寫SDRAM,單點(diǎn)讀SDRAM, 數(shù)據(jù)飛讀,連續(xù)寫SDRAM,連續(xù)讀SDRAM 的功能。在程序當(dāng)中留有接口,方便其他功能 整合,符合模塊化設(shè)計(jì)的要求。
首先,完成功能的初始化,主要是設(shè)置選擇操作模式與存儲(chǔ) AD 數(shù)據(jù)的時(shí)鐘分頻系數(shù)。 作為SDRAM 的讀操作必須滿足寫滿之后,方可進(jìn)行,所以初始化主控IP 核為寫SDRAM 操作。設(shè)置分頻系數(shù)可以按照如下公式計(jì)算:

其次,通過對(duì)于串口進(jìn)行協(xié)議解析,分別實(shí)現(xiàn)五部分預(yù)設(shè)功能。主程序操作流程如圖4所示。
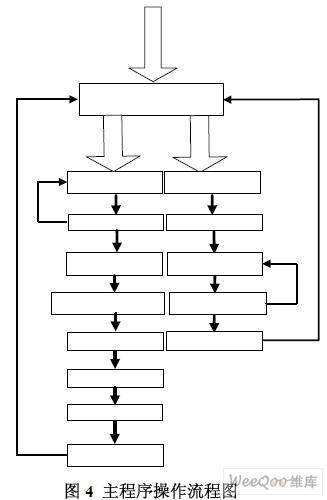
實(shí)現(xiàn)的五部分功能依次為:
(1) 單點(diǎn)寫SDRAM 操作:CPU 給出地址,數(shù)據(jù),以及寫操作選擇信號(hào)。
(2) 連續(xù)寫SDRAM 操作:CPU 只是給出寫操作選擇信號(hào),由主控IP 核將AD 數(shù)據(jù)寫入至SDRAM 環(huán)形存儲(chǔ)區(qū)域內(nèi)。
(3) 數(shù)據(jù)飛讀操作:只需要讀取飛讀數(shù)據(jù)寄存器,可以將當(dāng)前狀態(tài)AD 輸入值送回至CPU,偵測(cè)當(dāng)前狀態(tài)。
(4) 單點(diǎn)讀SDRAM 操作:CPU 送出讀SDRAM 地址,然后選擇讀操作,設(shè)置控制寄存器為0x00000001,啟動(dòng)讀操作。最后將讀回?cái)?shù)據(jù)通過串口實(shí)時(shí)回傳。
(5) 連續(xù)讀SDRAM 操作:是將基本讀操作進(jìn)行循環(huán)執(zhí)行。設(shè)置串口回傳緩沖區(qū)為80 字節(jié),連續(xù)讀SDRAM 數(shù)據(jù)并連續(xù)填寫緩沖區(qū),一旦填滿,則啟動(dòng)串口發(fā)送。同時(shí),讀地址在每次讀操作結(jié)束后自動(dòng)加一,當(dāng)操作次數(shù)達(dá)到環(huán)形空間最大存儲(chǔ)數(shù)量時(shí),停止連續(xù)讀操作。
4 結(jié)束語
本設(shè)計(jì)作為水下無線傳感器網(wǎng)絡(luò)(UW-ASN)節(jié)點(diǎn)的設(shè)計(jì)組成部分,具有結(jié)構(gòu)清楚,功 能完善,整合性強(qiáng),性能可靠的特點(diǎn)。設(shè)計(jì)整體架構(gòu)的模塊化操作以及可編程性,使得整個(gè) 設(shè)計(jì)開發(fā)的具有靈活性與低風(fēng)險(xiǎn)性。經(jīng)項(xiàng)目試驗(yàn)驗(yàn)證,該數(shù)據(jù)采集與存儲(chǔ)設(shè)計(jì)滿足傳感器節(jié) 點(diǎn)的功能要求,為水聲通信試驗(yàn)順利進(jìn)行以及水下無線傳感器網(wǎng)絡(luò)的功能完善提供可靠保證。
-
FPGA
+關(guān)注
關(guān)注
1626文章
21670瀏覽量
601879 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
38文章
5911瀏覽量
113521 -
無線傳感器
+關(guān)注
關(guān)注
15文章
770瀏覽量
98314
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于FPGA的數(shù)據(jù)采集系統(tǒng)
消費(fèi)電子開發(fā)實(shí)例1:壓力傳感器數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
求“節(jié)點(diǎn)數(shù)據(jù)采集系統(tǒng)數(shù)字地震儀”資料
節(jié)點(diǎn)數(shù)據(jù)采集系統(tǒng)數(shù)字地震儀
數(shù)據(jù)采集圖像傳感器噪聲信號(hào)不以0為波動(dòng)中心
無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)數(shù)據(jù)的短距離接收設(shè)計(jì)探討
怎么實(shí)現(xiàn)基于FPGA的水聲信號(hào)采樣存儲(chǔ)系統(tǒng)設(shè)計(jì)?
基于FPGA和DSP芯片的光纖傳感信號(hào)實(shí)時(shí)采集系統(tǒng)設(shè)計(jì)
傳感器數(shù)據(jù)采集/總線數(shù)據(jù)采集記錄知識(shí)分享
USB接口智能傳感器標(biāo)定數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
基于SOPC技術(shù)的水聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)設(shè)計(jì)
基于FPGA的水聲信號(hào)采樣存儲(chǔ)系統(tǒng)設(shè)計(jì)
基于FPGA水聲信號(hào)采集存儲(chǔ)系統(tǒng)的設(shè)計(jì)

基于Linux的水聲信號(hào)采集存儲(chǔ)系統(tǒng)的設(shè)計(jì)
MSP430單片機(jī)的多頻水聲信號(hào)采集器設(shè)計(jì)詳析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論