 腿輪混合式移動機器人的設計與實現
腿輪混合式移動機器人的設計與實現
"對于移動機器人的開發來說,其大小,重量及性能都非常重要,因此堅固的模塊化CompactRIO系統非常適合用于開發。 LabVIEW和NI硬件之間定義良好的兼容性顯著地減少了開發者執行系統集成的時間和精力。"
- Pei-Chun Lin, Department of Mechanical Engineering, National Taiwan University
挑戰:
開發一個腿輪混合式移動機器人,使其能在平坦的地勢上快速流暢地行駛,也可在天然或人工不平坦的地形上順利通過。
解決方案:
使用NI LabVIEW和CompactRIO以及各種I / O模塊將機械、電子及軟件開發快速集成到功能型機器人原型。
項目背景
腿部和車輪這兩種方法在地面運動平臺上被廣泛采用。 經過漫長的演變過程,大多數陸地動物的腿部都靈活有力,并能夠快速順暢地在不平坦的天然地形上奔馳。 在另一方面,人類發明了平地上專用的運動車輪,其出色的功率效率和在平地上高速的流暢運行是腿部運動無法比擬的。
由此,來自國立***大學的仿生機器人實驗室(BioRoLa)團隊致力于設計一個腿輪混合式機器人,它結合了車輪和腿部的移動性,在平坦和惡劣環境下都能為室內室外行走提供一個移動平臺。
機械設計
大多數混合動力平臺上不同的輪子和腿都有不同的裝置和激勵器,相比這些平臺,這款名為Quattroped的腿輪混合式移動機器人采用了一種轉換機制,可將自身特定的一部分變形成為一個輪子或一條腿。 從幾何角度來說,一個輪子通常有一個圓形輪圈,而旋轉軸則位于輪圈中間。 輪圈與地面接觸,而旋轉軸與機器人身體上的一點相連,此點就是“髖關節”。 在一般情況下,輪式移動時輪子在平地上運動并不斷旋轉,車輪與地面的接觸點就位于髖關節下的一定距離處。相對而言,用腿移動時腿部以周期性方式運動,在髖關節和地面接觸點之間沒有特定的幾何配置;因此腿部在運動中的相對位置具有周期性頻繁變化的特點。
基于這一觀察發現,將髖關節移出圓形輪圈中心并將連續運動模式改為其他運動模式,即能達到輪模式向腿模式的轉換。 這激發了我們去設計一種能直接控制圓形輪圈和髖關節的相對位置的模式,從而它既能進行輪運動又能進行腿運動。 由于圓形輪圈是一個二維的對象,實現這一目標的最直接的方法是再增加一個自由度(DOF),沿著運動方向調節髖關節相對圓形輪圈的位置。 兩個自由度的運動也互相形成直角。 此外,無論是輪模式還是腿模式都能有效運行同一組的驅動功率。
機電一體化
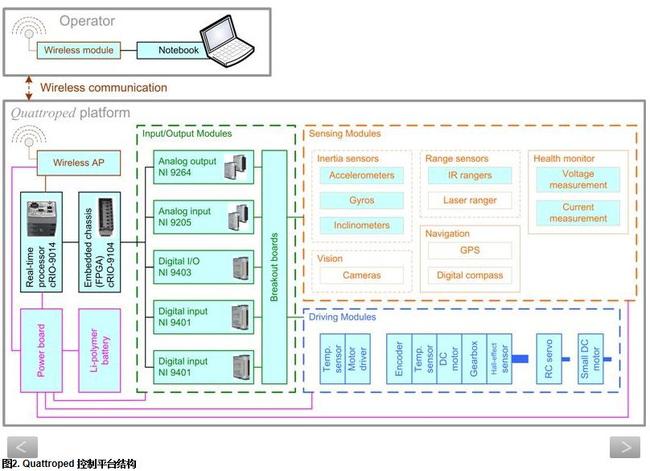
我們采用NICompactRIO嵌入式控制系統作為機器人控制器,它包括一個400MHz的實時處理器和3M現場可編程門陣列(FPGA)。 FPGA直接連接NI C系列I/O模塊,這些模塊能從載板傳感器和激勵器獲得數據。 對于模擬I/O我們采用NI 9205和NI 9264I/O模塊,對于數字I/O采用NI 9401和NI 9403I/O模塊。FPGA與實時處理器相連,并通過IEEE 802.11無線方式與電腦進行通訊。
機器人傳感器包括:馬達和功率放大器上用于健康監測的溫度傳感器;用于電源管理的電壓和電流測量傳感器;用于腿輪配置校準的霍爾(Hall)效應傳感器;用于身體狀態測量的6軸慣性制導儀和2軸測斜儀;用于離地間隙測量的3個紅外距離傳感器。全球定位系統、視覺和激光測距儀等各種傳感器也被用于提高機器人的感應能力。機器人上的激勵器包含8個用于驅動的直流有刷電機,2個用于前腿車輪轉動的高扭矩RC伺服電機,用于輪腿切換的四個小型RC伺服電機和四個小型直流有刷電機。
軟件
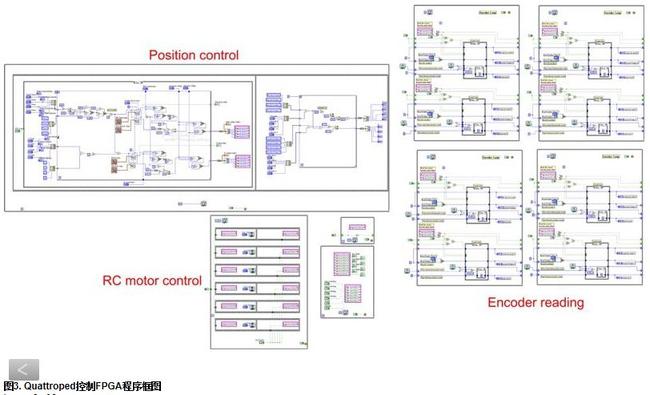
三個運行LabVIEW 的計算核心(PC,實時系統和FPGA)負責不同的任務。 用戶操作PC,將高級指令(如機器人應該以輪模式還是腿模式運行)發送到NI CompactRIO控制器。控制器以1kHz的循環速率運行,將關于機器人健康的重要信息發送回來,并在PC上記錄狀態數據。 機器人軟件架構包括各種狀態機,每個狀態代表一種機器人行為。 其他需要高速信號交換的算法以10 kHz的循環率在FPGA上運行。 包括直流電動機、編碼器讀數以及基于PWM的RC伺服命令的比例-積分-微分(PID)控制。
機器人通電后,我們進行電機校準,定義機器人每條腿輪上兩個活躍自由度的完全幾何配置。 通過匹配安裝在機器人身體上的霍爾效應傳感器和安裝在腿輪內部磁鐵的相對位置實現校準。 我們可以在腿模式或輪模式下操作經校準過的機器人,這取決于當前RIM配置(即為車輪或半圈腿模式)。 另外,我們也可以通過腿輪轉換來改變腿輪配置。 機器人輪模式下的行為包括站立、行駛和入座。 站立和入座為兩個瞬態狀態,用以過度最初地面配置和行駛行為。 在行駛行為中,前進速度和轉彎速率都連續可調。 同樣,當機器人在腿模式下運作時,站立和入座行為也屬于瞬時狀態。 站立起來后的機器人可以執行各種行為,包括步行、小跑、跨步、跨越障礙和爬樓梯。
NI軟硬件的益處
在一般情況下,機器人屬于高自由度的復雜系統。 機器人的成功發展需要花費時間和精力來妥善整合各種機械、電氣和計算機系統。 來自國立***大學BioRoLa團隊,主要由擁有機械工程背景的學生組成,他們需要一個可靠、模塊化、易于使用及良好集成的平臺。
經過廣泛的研究,我們發現NI產品能為我們的應用程序提供最佳解決方案,原因如下: LabVIEW為非編程背景的學生提供了直觀的圖形化流程圖表示方法,可以讓他們輕松建立過程圖并作為解決方案,然后再將過程圖轉化為軟件。 能在Windows,RTOS和基于FPGA的目標上使用相同的圖形化開發環境也極其有幫助。 由于開發控制器軟件時我們不必花時間學習底層的編程語法,因而能夠花更多的時間專注于我們設計的機械部分。
“對于移動機器人的開發來說,其大小,重量及性能都非常重要,因此堅固的模塊化CompactRIO系統非常適合用于開發。 LabVIEW和NI硬件之間定義良好的兼容性顯著地減少了開發者執行系統集成的時間和精力。”
未來計劃
憑借NI LabVIEW圖形化系統設計和NI CompactRIO,一支機械工程學生團隊設計出了一個擁有優雅軟件構造的復雜機電一體化系統,對于今后的進一步開發擴展也很方便。 在硬件方面,我們正在將各種傳感器融合到當前的機電化系統中,以提高機器人的感應能力。 在動作方面,我們正在完善和開發具有閉環控制功能的腿部行為,以提高機器人在各種具有挑戰性的地形上的移動能力,并開發其腿部動態步態。
-
處理器
+關注
關注
68文章
19169瀏覽量
229163 -
FPGA
+關注
關注
1626文章
21671瀏覽量
601914 -
機器人
+關注
關注
210文章
28212瀏覽量
206565
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論