 步進電機的特點及驅動控制系統的設計
步進電機的特點及驅動控制系統的設計
一、步進電機
1.1 步進電機的工作原理
步進電機是將電脈沖信號轉變為角位移或線位移的執行機構。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點,使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
1.2 步進電機的特點
本實驗所用的步進電機為感應子式步進電機(型號為42BYG016)。感應子式步進電機與傳統的反應式步進電機相比,結構上轉子加有永磁體,以提供軟磁材料的工作點,而定子激磁只需提供變化的磁場而不必提供磁材料工作點的耗能,因此該電機效率高,電流小,發熱低。因永磁體的存在,該電機具有較強的反電勢,其自身阻尼作用比較好,使其在運轉過程中比較平穩、噪音低、低頻振動小。
感應子式步進電機某種程度上可以看作是低速同步電機。一個四相電機可以作四相運行,也可以作二相運行。(必須采用雙極電壓驅動),而反應式電機則不能如此。例如:四相八拍運行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍運行方式。不難發現其條件為C=,D=。 一個二相電機的內部繞組與四相電機完全一致,小功率電機一般直接接為二相,而功率大一點的電機,為了方便使用,靈活改變電機的動態特點,往往將其外部接線為八根引線(四相),這樣使用時,既可以作四相電機使用,可以作二相電機繞組串聯或并聯使用。(本實驗采用兩相四拍)
1.3 步進電機的靜態指標
相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。
拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA-AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A.
步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度(轉子齒數J*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。
1.4 步進電機的動態指標
1)步距角精度:
步進電機每轉過一個步距角的實際值與理論值的誤差。用百分比表示:誤差步距角*100%。不同運行拍數其值不同,四拍運行時應在5%之內,八拍運行時應在15%以內。
2)失步:
電機運轉時運轉的步數,不等于理論上的步數。稱之為失步。
3)失調角:
轉子齒軸線偏移定子齒軸線的角度,電機運轉必存在失調角,由失調角產生的誤差,采用細分驅動是不能解決的。
4)最大空載起動頻率:
電機在某種驅動形式、電壓及額定電流下,在不加負載的情況下,能夠直接起動的最大頻率。
5)最大空載的運行頻率:
電機在某種驅動形式,電壓及額定電流下,電機不帶負載的最高轉速頻率。
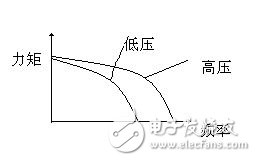
6)運行矩頻特性:
電機在某種測試條件下測得運行中輸出力矩與頻率關系的曲線稱為運行矩頻特性,這是電機諸多動態曲線中最重要的,也是電機選擇的根本依據。
1.5 步進電機的驅動控制系統
控制系統的組成方框圖如下:
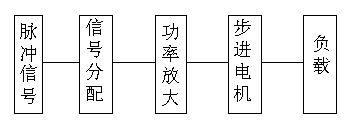
1)脈沖信號的產生
脈沖信號由單片機AT89S52的I/O口產生,一般的脈沖信號的占空比為0.3-0.4左右,電機轉速越高,占空比則越大。本實驗采用的占空比為0.5。
2)信號分配
感應子式不僅以二、四相電機為主,二相電機工作方式有二相四拍和二相八拍兩種, 具體分配如下:二相四拍為,步距角為1.8度;二相八拍為,步距角為0.9度。本設計采用步距角為1.8度。
3)功率放大
功率放大是驅動系統最為重要的部分。步進電機在一定轉速下的轉矩取決于它的動態平均電流而非靜態電流(而樣本上的電流均為靜態電流)。平均電流越大電機力矩越大,要達到平均電流大這就需要驅動系統盡量克服電機的反電勢。因而不同的場合采取不同的的驅動方式,到目前為止,驅動方式一般有以下幾種:恒壓、恒壓串電阻、高低壓驅動、恒流、細分數等。
步進電機一經定型,其性能取決于電機的驅動電源。步進電機轉速越高,力距越大則要求電機的電流越大,驅動電源的電壓越高。電壓對力矩影響如下:
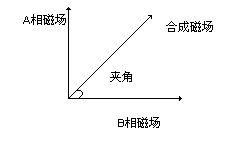
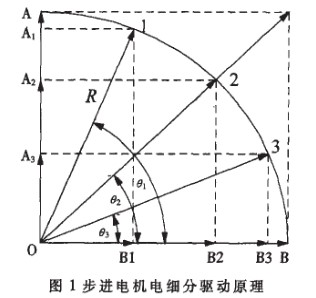
4)功率放大細分驅動器
在步進電機步距角不能滿足使用的條件下,可采用細分驅動器來驅動步進電機,細分驅動器的原理是通過改變相鄰(A,B)電流的大小,以改變合成磁場的夾角來控制步進電機運轉的。
二、驅動器
由于單片機的I/O不具有直接驅動步進電機的能力,故在本系統中需要步進電機驅動器,我們選擇驅動器為KD-221,該驅動器具有輸入電壓范圍廣,控制信號輸入方式多樣等特點。其具體接法如下:
2.1、電源接線:
①、E高:當驅動電壓大于10V時,正極接此座,使用時最大不能大于40V,以防損壞模塊。
②、E低:當驅動電壓小于10V時,正極接此座。
③、地:驅動電壓E高、E低的的負極接此座。
④、A ,:接電機A相線圈的二根引線。
⑤、B, :接電機B相線圈的二根引線。
2.2、控制信號接線:
①、CP:接控制器發給步進電機的走步脈沖信號線。
②、CW:接控制器發給步進電機的走步方向信號線。
③、VP:接CP和CW信號的負極,即邏輯電路電源的負極。
④、本驅動器內部設計接收信號為RTTL電平,即5V電平,如其它邏輯電平信號需要接限流電阻,否則可能損壞光耦元件。
三、光電開關
本系統中所用傳感器為EE-EX672關電開關,該傳感器為開關型傳感器,四個接線腳分別為“+,L,OUT,-”其輸入電壓范圍廣為直流5-24V,L為控制指示端,當“L”與“+”相連時,傳感器未檢測到物體時LED燈發光,當“L”懸空時則相反,其特點為:
1. 動作模式備有遮光時ON/入光時ON(可切換型)
2. 應答頻率為1KHZ的高速響應
3. 入光顯示燈明顯,容易進行動作確認。
4. 電源電壓為DC-24V的廣范圍
5. 備有遮光時入光顯示燈燈亮型
-
控制系統
+關注
關注
41文章
6546瀏覽量
110479 -
電機
+關注
關注
142文章
8933瀏覽量
145096 -
步進電機
+關注
關注
150文章
3095瀏覽量
147346
發布評論請先 登錄
相關推薦
步進電機控制系統的設計與實現


步進電機的電細分驅動技術實現控制系統的高精度位移
步進電機控制系統程序如何設計






 工商網監
工商網監
評論