 引入虛擬阻抗對下垂法的并聯技術進行改進
引入虛擬阻抗對下垂法的并聯技術進行改進
引言
基于下垂法的并聯技術,其控制策略簡單,技術成熟,非常適用于實際系統。然而由于逆變電源輸出阻抗存在阻性成分,而且有時不能忽略,因此在系統設計時,它對于輸出功率特性和系統環流的影響就不能一概而論。如果能找到某種控制措施,使得并聯系統輸出阻抗中感性成分占絕對比重,這樣就滿足下垂法并聯的應用條件。在此采用“虛擬阻抗法”可改善上述問題。由于并聯系統在輸出電壓的不同頻段對于輸出阻抗有著不同的特性要求,所以可采用相應的控制策略,使得逆變電源的輸出阻抗呈現系統的期望特性。這里采用光伏電池作為逆變電源,將改進后的下垂法并聯技術運用到光伏并網控制策略中,并進行了詳細研究。搭建了并聯型逆變電源裝置樣機,最后在1 kW的試驗平臺上對整個并聯過程進行了試驗研究。
2 主電路結構及工作原理
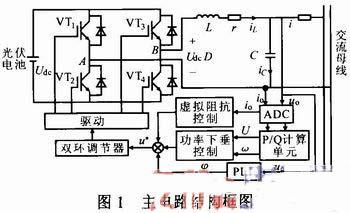
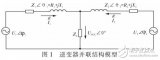
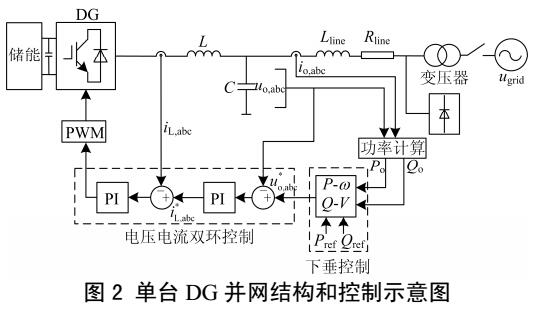
圖1為采用的單相全橋逆變主電路,其核心部分在于用內部電流環反饋和外部電壓環反饋來調節脈寬,采用電感電流和電容電壓作為反饋分量。光伏電池的輸出電壓通過逆變電路輸出。逆變橋的后級加入LC濾波器,用來消除輸出電壓中的高次諧波。P/Q計算單元的功能是完成并聯系統輸出無功功率和有功功率的計算,運算結果經功率下垂控制模塊調節后合成電壓信號。鎖相環(PLL)控制單元用來實現逆變電源輸出電壓頻率和相位的同步功能。
3 光伏電池的數學模型
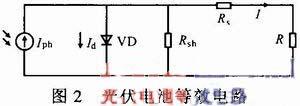
光伏電池是利用特殊材料的光伏效應制成的,光伏效應則是指光照使不均勻半導體或半導體與金屬結合的不同部位之間產生電位差的現象。它首先是由光子(光波)轉化為電子、光能量轉化為電能量的過程;其次是形成電壓的過程。根據電子學理論,當負載為純電阻時,光伏電池的實際等效電路如圖2所示。對應的I-U函數為:

式中:Iph為光生電流;I0為反向飽和電流(數量級為10-4A);Rs為串聯等效電阻;Rsh為內部并聯的電阻;=q/(AKT),K為玻耳茲曼常數(1.38x10-23J/K),T為絕對溫度,q為電子電荷(1.6×10-16C),A為二極管品質因子(當T=330 K時,約為2.8+0.15)。
4 虛擬阻抗法的分析
4.1 虛擬阻抗法的實質
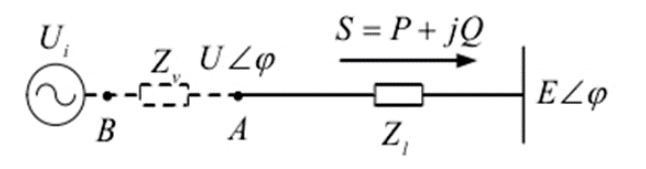
虛擬阻抗法針對系統在輸出電壓的不同頻段對輸出阻抗特性不同要求的特點,采用相應的控制策略,使等效輸出阻抗呈現出系統期望的特性。圖3為并聯系統的輸出阻抗等效示意圖。
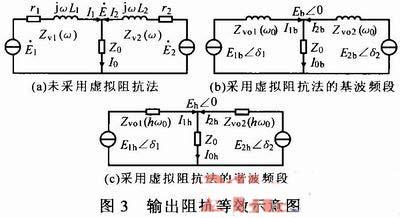
圖中下標1表示逆變電源1的變量:下標2表示逆變電源2的變量:下標0表示負載變量:下標b表示向量的基波分量:下標h表示向量的諧
波分量;0為輸出電壓的基波角頻率;h0為輸出電壓的諧波頻率。
由圖3可見,未采用虛擬阻抗法時,逆變電源是通過一串聯連接阻抗與負載相連;采用虛擬阻抗法后,逆變電源則分別通過等效阻抗相并聯。當然該阻抗不是真的物理器件,而是通過控制逆變電源產生的等效阻抗,并且輸出阻抗在輸出電壓的不同頻段表現出不同的特性。
4.2 電流反饋對輸出阻抗中阻性部分r的抑制
由圖1可得該系統的主電路狀態方程為:

式中:D為器件開關狀態的控制變量,有1,0和-1三態。
在逆變電源的控制模塊中,系統是依據輸入的正弦波和三角波比較而得的脈沖來控制功率開關器件。由于實際情況中開關是不連續的狀態,因此采用狀態空間平均法建立連續狀態平均模型進行分析,得到系統輸出電壓的動態模型為:

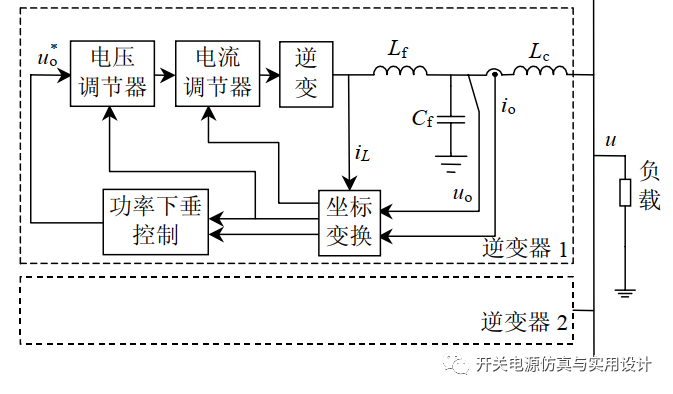
在此采用電感電流反饋控制,系統輸出電壓雙環復合控制結構如圖4所示。
由圖4可得:
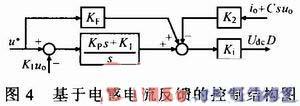
式中:Kp為PI調節比例系數;K為PI調節積分系數;KF為前饋調節系數。
聯立式(3),(4)可得:

由式(5)可見,當KiK2>>r時,基于電感電流反饋的系統輸出阻抗中r對系統的影響大大減弱。
4.3 虛擬阻抗法對輸出阻抗的校正
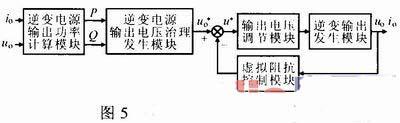
當逆變電源帶非線性負載運行時,系統輸出電流中含有大量諧波,其輸出阻抗高端不能呈現好的電阻特性。可運用虛擬阻抗自校正來調節輸出阻抗特性,圖5為其控制結構示意圖,有:

式中:Zvir(s)為虛擬阻抗;Zvo(s)為采用虛擬阻抗法的系統等效輸出阻抗。
由于要兼顧系統控制線性負載和非線性負載兩種情況,Zvo(s)應在基頻段呈現感性,在諧波頻段呈現阻性。故可設計如下虛擬阻抗來實現系統對輸出阻抗的校正,即:Zvir=鵳s/(s+鵳),則可得:
實際中鵳的選取不宜過大。當采用虛擬阻抗法來校正輸出阻抗時,實際是以降低系統的穩態精度為代價來提高其均流效果。因此還應綜合考慮系統的均流效果和穩態指標,實現優化設計。
5 仿真與試驗
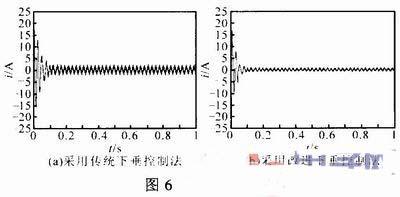
為驗證所提出虛擬阻抗法的正確性,在Matlab/Simulink中建立仿真模型,光伏電池單元參數設置如下:Rsh=10 kΩ,Rs=0.2 Ω,T= 300 K,A=2.8;光伏電池組件參數設置為:Rsh=10kΩ,Rs=0.8Ω,A=0.02。考慮到各光伏單元的連接和實際等效問題,Λ的取值比實際計算值13.68 V-1小得多。負載ZL=50 Ω,L1=810μH,L2=880μH,C=25μF,額定輸出功率S=1 kVA,額定頻率f=50 Hz,額定電壓U=314 V。下垂系數n=10-4V/var,m=10-4 rad/(w·s),nd=4.5×10-7V·S/var,md=4.5×10-7(rad·s)/w。濾波器截止角頻率ωc=10 rad/s。圖6為啟動循環電流的仿真波形。可見,盡管最初的峰值電流由于逆變器初始相位不同而有所區別,但采用虛擬阻抗器的下垂控制策略比傳統的下垂控制策略有更快的動態響應和更少的循環電流。
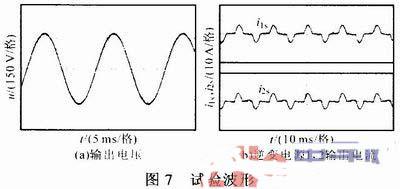
為進一步驗證所提出的改進下垂控制法的合理性,在一套額定功率為1 kW的試驗平臺上進行測試。每一個逆變器由型號為IKW20N60T的IGBT管和LC輸出濾波器組成,參數如下:L=1 mH,C=30霧,U0=220 V/50 Hz。逆變器的控制器由三環控制構成。內部電流環控制器和外部PI控制器用來調節電壓。負載控制器則采用了型號為TMS320LF2407A的數字處理器。圖7a為并聯系統的輸出電壓波形,圖7b為兩個逆變電源的輸出電流波形。可見,即使負載是非線性負載,系統的運行效果依舊良好。
6 結論
根據光伏電源并聯運行的研究,提出了一種基于改進下垂法的并聯運行控制策略。引入了虛擬阻抗的概念,設計了一種新型控制器,并在試驗平臺上進行了研究。仿真和試驗結果表明,該控制策略能迅速抑制系統啟動循環電流,獲得了更好的動態響應特性,是一種較為理想的控制策略。
-
濾波器
+關注
關注
160文章
7731瀏覽量
177703 -
功率
+關注
關注
13文章
2057瀏覽量
69782 -
電池
+關注
關注
84文章
10468瀏覽量
129026
發布評論請先 登錄
相關推薦
一種基于下垂控制和增加虛擬阻抗的逆變器并聯仿真實現 相關資料分享
基于滑模變結構控制的逆變器并聯控制策略研究
并聯逆變器環流抑制方法
虛擬阻抗對UPS并聯系統均流控制
功率下垂控制原理對逆變器并聯系統的按容分配負荷問題

用于多微源低壓微電網的虛擬阻抗反下垂控制
并網逆變器虛擬阻抗控制技術
一種基于下垂控制和增加虛擬阻抗的逆變器并聯仿真實現

虛擬同步發電機_一種基于下垂控制和增加虛擬阻抗的逆變器并聯仿真實現
下垂控制和增加虛擬阻抗的逆變器并聯仿真實現
學習下垂控制的逆變器并聯原理
逆變器并聯之下垂控制引入虛擬阻抗





 工商網監
工商網監
評論