 基于AVR MCU實現多功能導盲車系統的設計
基于AVR MCU實現多功能導盲車系統的設計
一、項目概述
1.1 引言
隨著社會的發展,盲人對獨立生活和事業追求越來越強烈,但是要保證在車水馬龍的城市生活中安全自如的活動就需要一個專門的導盲設備來進行輔助。因此我們就要設計一款多功能的導盲車來完成這份重任。
1.2 項目背景/選題動機
在實際生活中,我們遇到過一些獨立生活的盲人,他們在出行方面面臨著很大的問題,比如說他們在按盲道走的過程中,總會遇到各種障礙。因此,我們就想是否能夠做出一款基于AVR MCU的導盲車來幫助他們解決這個問題,更好的獨立生活。同時,在做這款車的過程中,我們也能學到關于AVR MCU的一些知識。AVR MCU是一個應用性比較廣泛的產品,我們想如果能了解比較多的關于AVR MCU 的知識,應該會對我們以后的工作帶來很大的益處。綜上所述,我們想做一個基于AVR MCU的導盲車。
二、需求分析
2.1 功能要求
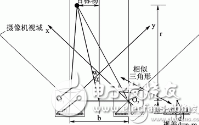
通過CMOS攝像頭采集路況信息,經CPU處理判斷前方是否有障礙物。若無,則車繼續引導人前行;若有障礙物,則車發聲報警。通過超聲波傳感器 檢測,如果可以越過則繼續前進,如果無法越過,就停止。如果需要轉彎,則減速轉彎。同時導盲車上還有GPS導航系統,可以確切知道盲人所處位置。
檢測,如果可以越過則繼續前進,如果無法越過,就停止。如果需要轉彎,則減速轉彎。同時導盲車上還有GPS導航系統,可以確切知道盲人所處位置。
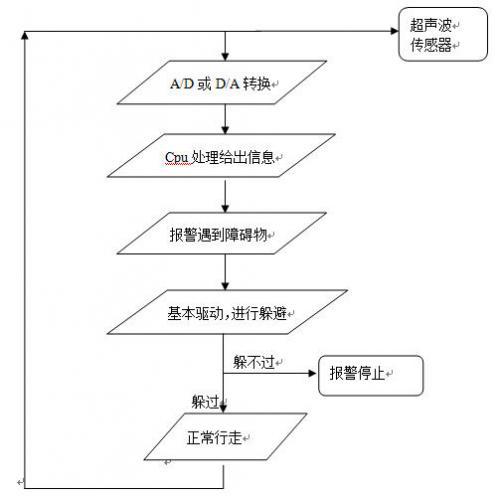
圖1 系統架構
2.2 性能要求
1、精確度:在車尋線的過程中,不能偏離盲道,應準確的按盲道走。
2、穩定性:在導盲的過程中,不能輕易的發生死機。
3、安全性:在遇到危險的時候,能及時報警。
4、低功耗:AVR單片機在低功耗的方面是做的非常優秀的。選擇AVR MCU可以實現低功耗的性能要求。
三、方案設計
3.1 系統功能實現原理
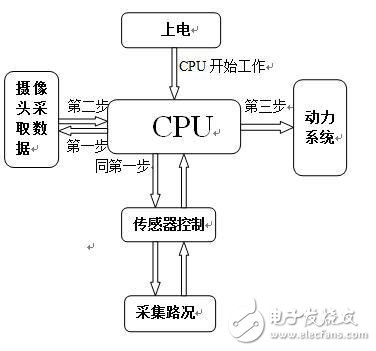
系統硬件結構框圖
說明:上電之后,CPU開始工作。首先,CPU開始控制攝像頭和傳感器同時工作,同時采集信息,把采集回來的信息進行分析,在CPU內部進行A/D或D/A轉換,然后將轉換后的信息傳遞給舵機,使舵機在CPU的控制下進行工作。
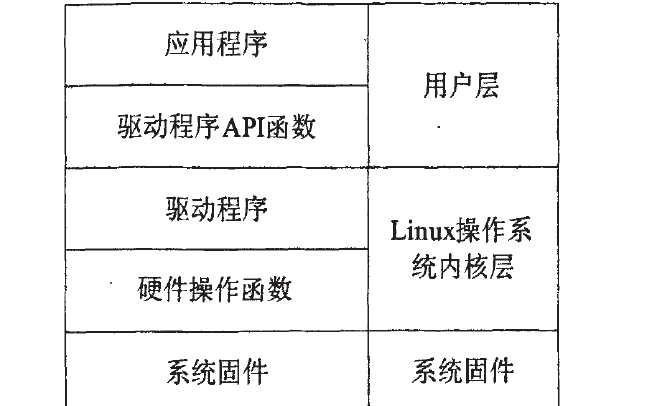
3.2 硬件平臺選用及資源配置
運用EVK1100開發板進行前期開發
3.3 系統軟件流程
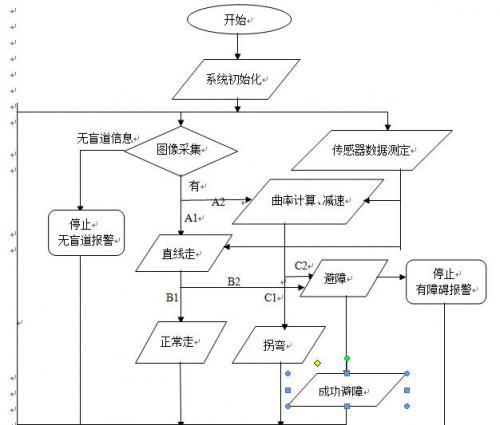
程序運行流程圖
說明:A1無彎道,A2有彎道
B1無障礙物,B2有障礙物
C1拐彎,C2有障礙物
3.4 系統預計實現結果
本設計最終產品能夠安全地指引盲人在盲道行走。它能夠安全精確地尋找盲道并按照盲道行走以指引盲人行走。當遇到障礙物的時候,能夠發出警報提醒盲人前方有障礙物,及時躲避。當盲人向其發出定位指令時,能夠運用GPS模塊,快速告知盲人具體位置。
-
mcu
+關注
關注
146文章
16989瀏覽量
350306 -
AVR
+關注
關注
11文章
1122瀏覽量
78585 -
gps
+關注
關注
22文章
2884瀏覽量
166035
發布評論請先 登錄
相關推薦
多功能導盲車系統設計與實現
DSP的EASI十二導聯多功能Holter系統
一種34位MCU超聲相控陣導盲系統設計

介紹Atmel AVR MCU在單芯片上的Zigbee功能
如何使用ARM9進行公交車多功能終端的研制設計
如何使用機器視覺實現智能導盲眼鏡的設計

AVR的自編程功能






 工商網監
工商網監
評論