 采用LPC2132控制步進電機實現康復機器人系統的設計
采用LPC2132控制步進電機實現康復機器人系統的設計
引言
LPC2132 是基于一個支持實時防真的嵌入式跟蹤的32/16 位ARM7TDMI-STM CPU 的微控制器,并帶有32 KB,64 KB,512 KB的嵌入的高速FLASH存儲器。其內部有1 個10 位8 路A/D 轉換器可用于采集傳感器信號,并具有建立在標準定時器0/1之上的脈寬調制器,用于對步進電機的控制。步進電機作為數字化元件,與LPC2132相結合,可以達到精確控制。
1 步進電機的特性
步進電機是一種用電脈沖信號進行控制的電動機,它將脈沖信號轉變成角位移,因此非常適合于單片機控制。步進電機的角位移或線位移量與電脈沖個數成正比,它的轉速或線速度與電脈沖頻率成正比,在負載能力范圍內這些關系不因電源電壓、負載大小、環境條件的波動而變化。通過改變脈沖頻率的高低可以在很大范圍內實現步進電機的調速,并能進行快速啟動、制動和反轉。
本設計針對目前各個領域對自動化的需要,采用LPC2132處理器與步進電機結合,并將其應用于康復機器人領域,能夠極大的減輕醫師的勞動強度,提高對患者的治療效率。
2 LPC2132 控制芯片的主要功能及應用
(1)LPC2132 芯片當中具有建立在標準定時器0/1上的脈寬調試器(PWM)。通過設置不同的匹配寄存器,可以獨立的控制上升沿和下降沿的位置,進而可以控制多相位電機。
(2)具有一個逐次逼近的A/D轉換器。其中8個管腳復用為輸入腳,可將從角度傳感器和力傳感器獲得的模擬量轉化為數字量并進行處理。
(3)具有異步串行口。可以與計算機進行實時信息交互。
3 控制系統方案設計
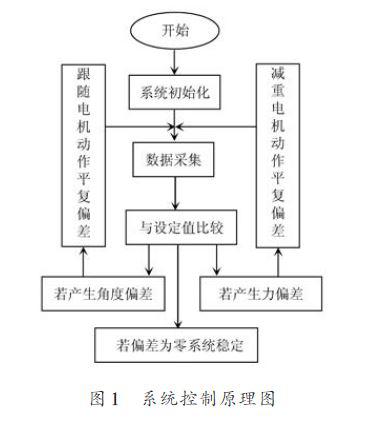
3.1 系統控制原理
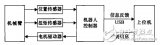
由于腦卒中患者腿部不具有正常的支撐能力,所以在康復訓練的時候,需要對患者進行減重[7-8].減重控制平臺搭建在下肢外骨骼康復訓練平臺的上方,它通過吊繩(含力傳感器)和馬甲與患者相連,并且可以跟隨患者在設定的軌道上移動,能夠實時的對患者進行恒力減重。正常情況下,減重平臺在患者的正上方,吊繩與減重平臺是垂直的,當患者在康復機器人訓練平臺上進行康復行走訓練時,會帶動吊繩偏離豎直方向。角度傳感器檢測出這個角度,驅動偏移電機動作,從而平復這個角度。控制原理圖如圖1所示。
3.2 總體結構設計
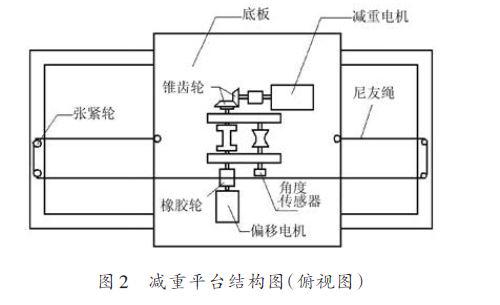
減重平臺上有兩個步進電機,分別為偏移電機和減重電機。偏移電機上連有尼龍繩,尼龍繩連接在減重平臺的兩端,從而帶動減重平臺左右移動。而減重電機通過一對錐齒輪連接到滾筒上,通過控制滾筒上繩子的收放來調節繩子的張力,以實現減重。
減重平臺的結構俯視圖如圖2所示。
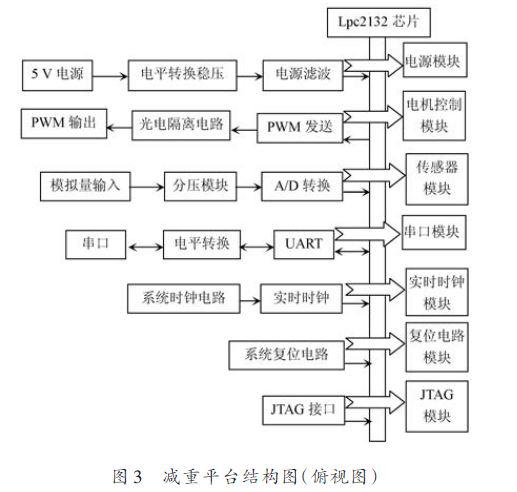
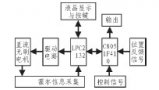
減重控制平臺采用雙閉環控制,分別為力閉環控制和角度閉環控制。主控芯片采用Phlips 公司的LPC2132 芯片配備外圍控制電路模塊如圖3 所示。
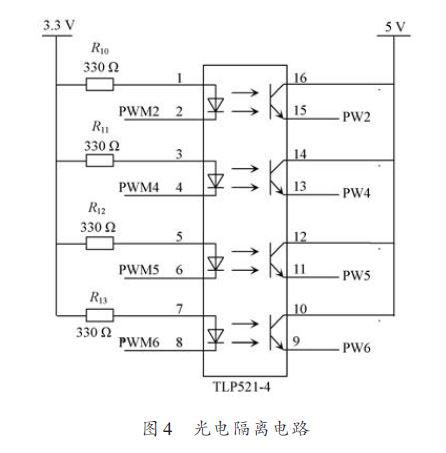
為了消除外接電路的干擾,采用光電耦合電路,將核心控制電路和驅動器電路隔離開來,避免外接電路干擾或破壞核心控制電路[10].本設計選擇了TOSHIBA公司的TLP521-4光電耦合芯片。光電隔離電路如圖4所示,左側PWM 作為輸入斷與芯片的管腳相連,右側PW 作為輸出端與步進電機驅動器相連。
3.4 軟件設計
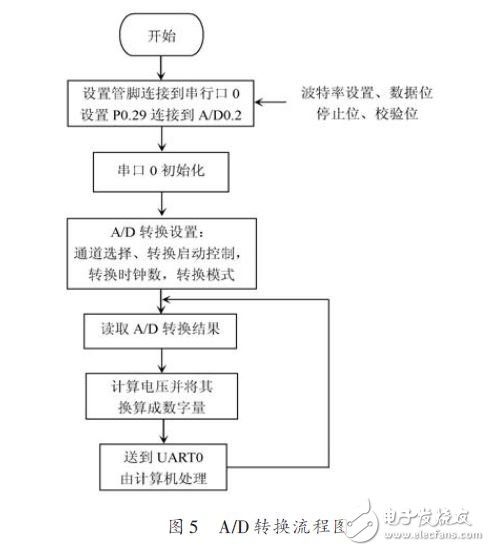
(1)控制系統需要實時的處理拉力傳感器和角度傳感器采集的信號,并將這些模擬量通過A/D模塊轉化成數字量。以角度傳感器為例,本系統選用的角度傳感器是將旋轉的角度轉換成動態的電壓。
如圖5為A/D轉換流程圖,由于控制芯片滿額度電壓為3.3 V,且轉換精度為10 位,即2^10=1 024 級,若從A/D轉換寄存器中讀到的電壓值為V,則實際電壓U 為:
(2)要想使步進電機能夠運轉,需要控制系統提供相應的脈沖信號。通過設置LPC2132芯片中的不同匹配寄存器來獲得相應的脈沖信號。通過設置不同的脈沖頻率來控制步進電機的轉速。軟件用C語言編寫并在ADS開發環境中完成,將編寫好的程序轉換成Hex文件,將文件導入到Protues軟件當中進行仿真。如圖6所示。
(3)通過設置串口,可以與計算機進行實時交互。
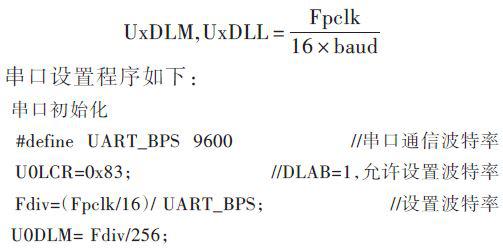
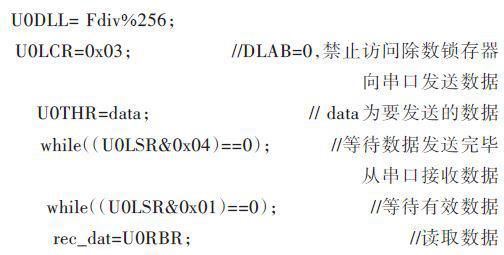
LPC2132 具有2 個異步串行口,分別為UART0 和UART1.在串口初始化的時候,必須設置除數鎖存器,它保存了用于產生波特率時鐘的VPB 時鐘分頻值,波特率時鐘必須是波特率的16倍,計算公式如下:
軟件部分需要劃分不同的程序模塊,包括串口程序,信息采集程序,脈沖調試程序。本軟件的編寫在適合ARM 芯片的ADS開發環境中進行,并用匯編語言作為啟動代碼,各程序模塊用C語言進行編程。為了消除系統誤差,增加系統的響應速度,提高系統的控制精度,本系統引進了PID算法,以實現對系統的閉環控制。
4 結語
本設計以下肢外骨骼康復機器人為研究背景,從工程實際出發,設計了一種康復機器人減重平臺。通過LPC2132控制步進電機,實現力閉環和角度閉環雙閉環控制。達到對患者的實時跟隨,并且恒力減重功能。從而減少了康復醫師的勞動強度,提高了患者康復訓練的效率。
-
嵌入式
+關注
關注
5068文章
19017瀏覽量
303260 -
機器人
+關注
關注
210文章
28203瀏覽量
206519 -
步進電機
+關注
關注
150文章
3095瀏覽量
147346
發布評論請先 登錄
相關推薦
【LinkIt 7687申請】手跟蹤式康復機器人系統
基于LPC2132的MRI病床控制系統中的COS-II應用設
一種基于STM32的力反饋型康復機器人控制系統設計
T-Robotics通過醫療康復機器人與物流機器人實現事業的多元化
2021年全球康復機器人市場增長至32億美元
上肢康復機器人現狀及研究分析
康復機器人行業產業鏈全景梳理及區域熱力地圖

「探索」康復機器人在神經康復中的應用






 工商網監
工商網監
評論