 對虛擬化操作系統進行實時性調度的解決方案介紹
對虛擬化操作系統進行實時性調度的解決方案介紹
引言
目前,虛擬化操作系統(hypervisor)廣泛應用于服務器、PC機等,這些應用領域對實時性要求較低。隨著一些嵌入式實時應用領域的發展,比如下一代手機對安全性、應用聚合和云計算等方面的需求,需要采用虛擬化操作系統。傳統的虛擬化操作系統很難滿足這些應用領域的實時性要求。經過大量的測試與分析,發現虛擬化操作系統實時性差的主要源頭之一是調度算法實時性不佳。有必要對虛擬化操作系統的調度方法進行實時性改造,使之可以應用于實時性要求較高的場合。本文提出了一種基于系統事件驅動和時間驅動相結合的實時調度方法,經實踐表明,該方法有效地解決了虛擬化操作系統在嵌入式系統應用中帶來的實時性問題。
1 問題提出
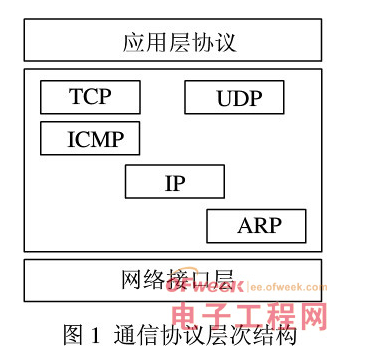
基于虛擬化操作系統(hypervisor),可以實現單CPU上多個操作系統(GuestOS)在相互隔離的內存域(Domain)中同時運行。如圖1所示,箭頭表示調度。其中的系統調度采用二級調度策略,虛擬化操作系統對GuestOS(Domain)進行第一級調度,GuestOS對自身的任務進行第二級調度,系統的實時性響應很難保證。
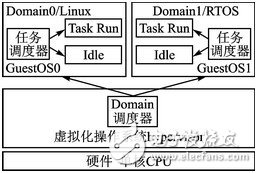
圖1 虛擬化操作系統
對于第一級調度(Domain調度),傳統的調度策略都是基于時間片的調度方法(SEDF、BVT、ARR、Credit等),通常應用于實時性要求較低的場合(網絡服務器等),對于實時性要求較高的場合(手機等),調度的實時性就很難滿足系統要求。具體表現為:CPU利用率低、中斷響應緩慢、GuestOS之間數據通信速率不足等。為了改進這些性能,必須設計一種新的滿足實時性應用場合的調度方法。根據實際測試和分析,發現實時性響應差的主要瓶頸在于GuestOS不能夠得到及時的調度。
本文的方法主要對第一級調度策略進行改造,即改造虛擬化操作系統對GuestOS(Domain)的調度方法。
2 解決方法
本文的方法采用系統實時事件驅動Domain調度器的策略。當系統中有需要實時響應的緊急或重要事件發生時,這些事件有機會驅動Domain調度器產生調度行為,使之(緊急或重要事件)得到快速處理。當沒有緊急或重要事件發生時,Domain調度器采用基于時間片(權重)的調度算法。
2.1 調度原則
圖2表示了調度原則。圖2中,系統硬件中斷、GuestOS事件發送、Guest Idle之類的緊急或重要事件發生時,有機會通過強原則去驅動Domain調度器,切換Domain使之得到快速處理。當系統中沒有緊急或重要事件發生時,Domain調度器通過弱原則進行調度(時間片等)。
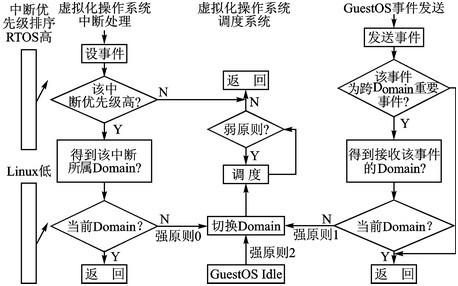
圖2 調度原則
2.2 實時性分析
以中斷處理為例分析中斷響應時間,如圖3所示。從圖3中可以看到,原調度策略的中斷響應時間包含:“等待Domain調度時間片結束” + “Doamin切換”。新的調度策略,僅包含“Doamin切換”時間。可見,采用新的策略,中斷的實時性響應得到了提高。
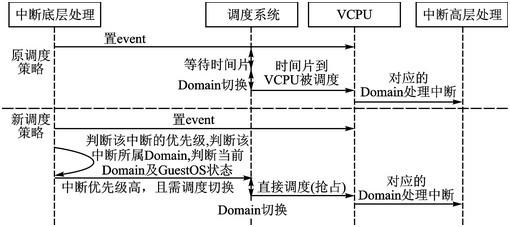
圖3 中斷實時響應分析
虛擬操作系統應用中常會有以下3類事件的實時響應需要考慮:
0類事件--底層硬件中斷需要得到上層某個Domain的快速響應處理;
1類事件--Domain(GuestOS)之間的通信事件需要被另一個Doamin快速處理;
2 類事件--Domain(GuetOS)中的任務空閑時,主動放棄CPU,通知Domain調度器使其他Domain(GuestOS)得到運行機會。
這些事件的實時性響應時間分析和中斷響應類似。
在本方法中,如圖4所示,上述的3類事件都以設置觸發事件的形式驅動Domain調度器,Domain調度器可以根據這些事件組合、當前的GuestOS狀態組合、當前的Domain調度狀態來產生調度決策。
2.3 方法實施
2.3.1 事件定義
本方法具體實現時,根據實時系統的具體應用情況,首先定義出緊急/重要事件(需要引發調度才能滿足實時響應要求的事件),并按照2.2節所述的3類實時事件劃分,對其分類并設計優先級排序。0類事件優先級最高,1類事件優先級居中,2類事件優先級最低,每類事件自身也按照優先級排序。
2.3.2 狀態定義
然后,根據系統設計和運行情況列出Domain狀態組合、GuestOS狀態組合,如表1、表2所列。最后,根據系統運行要求,設計出驅動事件調度查詢表,如表3所列。
表1給出了GuestOS運行狀態組合,表示每個guestOS中的任務運行情況。每個GuestOS可以處于Run或Idle兩個狀態,多個GuestOS的狀態組合起來(本文用2個GuestOS說明),就可以制作出GuestOS的狀態組合表。
表1 GuestOS狀態組合
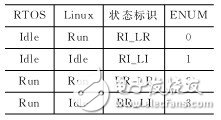
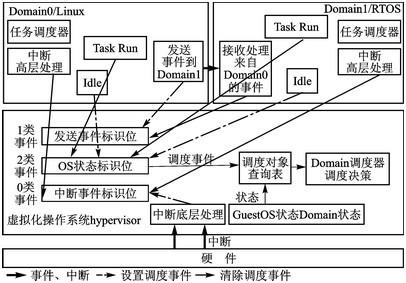
圖4 基于事件驅動的實時調度方法
表2 Domain狀態組合
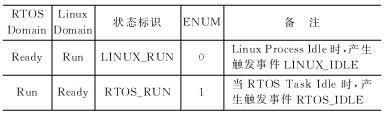
表2表示了Domain狀態組合。表示Domain調度器的調度情況,每個Domain可以處于Run或Ready兩個狀態,多個Domain的狀態組合起來(本文采用2個Domain),就可以制作出Doamin的狀態組合表。
表3 調度查詢表
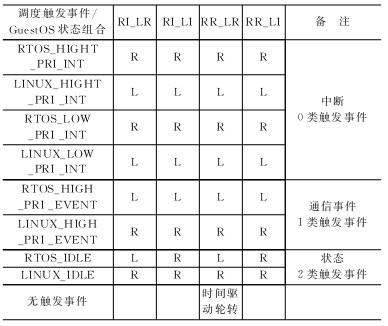
表3是調度查詢表。調度觸發事件可以通過它查詢到下一個需要被調度運行的GuestOS.它是一個二維的數組,其中列的維度由調度觸發事件表示,優先級從高向低排列,另一個行的維度由GuestOS狀態組合表示,包含表1的所有GuestOS狀態組合。通過這兩個維度的輸入,可以查詢到預期的需要被調度的GuestOS(Domain),作為調度器下一次調度決策的輸入。
2.3.3 事件置位與清除規則
2.2節圖4中表示了調度事件置位和清除規則,說明了3種類型的調度觸發事件是如何設置和清除的。
事件置位和清除規則時序如圖5所示。圖5表示了3種類型的調度觸發事件的設置和清除時機,以及事件驅動策略和時間片驅動策略的切換時機,其中S_timer的關閉/打開分別表示開始事件驅動調度/開始時間片驅動調度。圖中有5種事件置位/清除操作,其中虛線箭頭表示的5種操作是在GuestOS中進行的,需要采用超級調用(hypercall)實現,其中的硬件中斷事件置位操作(實線箭頭)是在虛擬化操作系統特權空間中進行的,可以直接操作。
2.3.4 事件優先級處理策略
當調度觸發事件到來時,首先設置事件標識位,然后去檢查各類事件組中的標識位。如果有更高優先級的事件存在,返回;如果沒有,再檢查自己是否是第一個觸發事件。如果是,關閉時間片驅動調度策略,開始事件驅動調度策略 (關閉S_timer),然后去查詢事件驅動調度表,對比當前Domain判斷是否需要產生調度。
當調度觸發事件響應處理完成后,需要調用hypercall清除,清除該事件的標識位后,要先去檢查一下是否有比自己優先級低的事件存在。如果有,就去處理它,查詢事件驅動調度表,判斷是否需要產生新的調度;如果沒有比自己優先級低的事件的存在,表示事件組中沒有其他事件存在了,啟動事件片調度策略,結束事件驅動調度策略 (打開S_timer)。
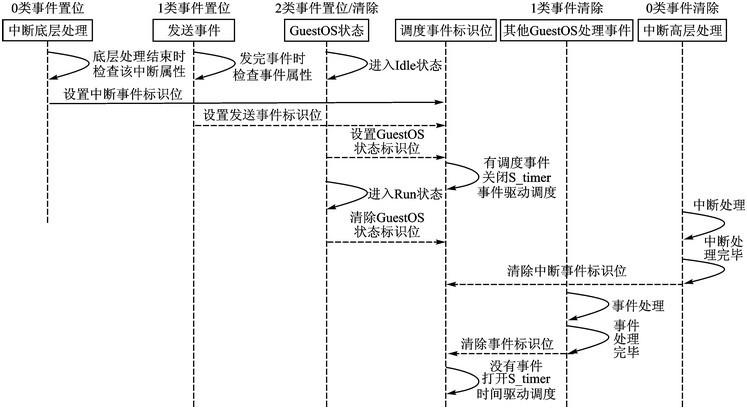
圖5 事件置位和清除規則時序圖
3 測試結果與分析
3.1 測試結果
硬件測試環境:ARM926EJS、主頻226 MHz、64 MB SDRAM、I/D Cache 16 KB/16 KB enable、MMU enable.軟件平臺:自研虛擬化操作系統(基于Xen)、Threadx、Linux(參考圖1)。測試軟件采用LMBench,以及根據實際應用場景設計的大量測試用例。
對本文提出的調度方法和常用的BVT調度算法進行對比測試,測試結果表明系統的實時性響應和系統的運行性能都有較大幅度的提升。根據對大量測試數據的統計,得到以下3個結果:
① GuestOS系統運行性能的平均加速比為:threadx 1.82,Linux 1.94.
② 中斷響應加速比為:單個GuestOS運行時為8474,兩個GuestOS同時運行時為15.6015.且響應時間平穩,有良好的可預測性。
③ GuestOS之間的數據通信速度加速比為12.51,且速率穩定。
3.2 測試分析
經過實踐應用表明,本文提出的方法有效地解決了虛擬化操作系統傳統調度方法帶來的CPU利用率低、中斷響應緩慢、操作系統(GuestOS)之間數據通信速度慢等問題。
-
嵌入式
+關注
關注
5072文章
19026瀏覽量
303516 -
服務器
+關注
關注
12文章
9029瀏覽量
85207 -
操作系統
+關注
關注
37文章
6747瀏覽量
123201
發布評論請先 登錄
相關推薦
國內著名的實時操作系統
uCOS-II實時操作系統實時操作系統與分時操作系統的區別是什么
Linux操作系統實時性分析及改進策略

基于Linux上進行改進的具有實時應用能力的現代嵌入式操作系統解決方案詳解
實時操作系統的特點_實時操作系統的組成
國產鴻道Intewel操作系統與Codesys高實時虛擬化運動控制解決方案





 工商網監
工商網監
評論