") 多傳感器融合的火災(zāi)探測系統(tǒng)的設(shè)計方案介紹
多傳感器融合的火災(zāi)探測系統(tǒng)的設(shè)計方案介紹
具有火災(zāi)探測功能的傳感器種類很多:煙霧傳感器、溫度傳傳感器、火焰感光傳感器、氣體傳感器和復(fù)合型火災(zāi)探測器等。在選擇火災(zāi)傳感器時,應(yīng)根據(jù)探測區(qū)域可能發(fā)生火災(zāi)的原因,火災(zāi)產(chǎn)生的特征來確定傳感器的類型。比如:在加油站(或油庫)可選擇紅外線傳感器,它對煙頭(或能引起油庫起火的火星)較敏感。由于物體在燃燒時一般都伴有煙、光、溫升、擴散輻射和異常氣味等綜合現(xiàn)象發(fā)生,利用多種傳感器各自特點、使用范圍、精度以提供局部現(xiàn)象和信息,再加以綜合做出準確的判斷,可以為決策者提供較準確的信息。
多傳感器融合的火災(zāi)探測是充分利用不同時間與空間的多模態(tài)信息,采用人工智能技術(shù),對按時序獲得的多模態(tài)觀測信息在一定準則下加以自動分析、優(yōu)化綜合和使用,獲得對被測對象的一致性解釋與描述,從而完成所需的決策和估計任務(wù),得到更可靠、準確的結(jié)論,使系統(tǒng)獲得比它的各組成部分更優(yōu)越的性能。它必須對來自多傳感器的數(shù)據(jù)進行多級別、多方面、多層次的處理,從而產(chǎn)生新的有意義的信息,而這種信息是任何單一傳感器所無法獲得的。
1 系統(tǒng)硬件設(shè)計
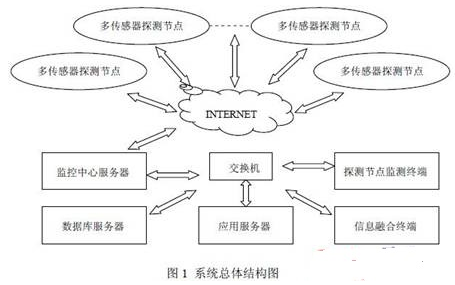
本方案硬件系統(tǒng)的核心控制器是采用三星的具有ARM920T核的16/32位多功能、低功耗的嵌入式處理器S3C2440.ARMSYS2440系列是基于三星S3C2440微處理器的ARM9高性能的開發(fā)平臺,提供多款TFT液晶屏配套。主頻400MHz,133MHz總線頻率。采用最小系統(tǒng)核心板加擴展板的雙層構(gòu)架,可配置1GB閃存,128M內(nèi)存。直接支持數(shù)字攝像頭,800x600液晶屏,同時提供WINCE4.2/WINCE5.0,LINUX2.4/2.6操作系統(tǒng)。基于多傳感器數(shù)據(jù)融合的火災(zāi)預(yù)警系統(tǒng)采用模塊化結(jié)構(gòu),主要由傳感器模塊、A/D轉(zhuǎn)換模塊、S3C2440控制器、報警模塊、執(zhí)行模塊和控制器必需的電源模塊和存儲器模塊組成,圖1為系統(tǒng)結(jié)構(gòu)圖。
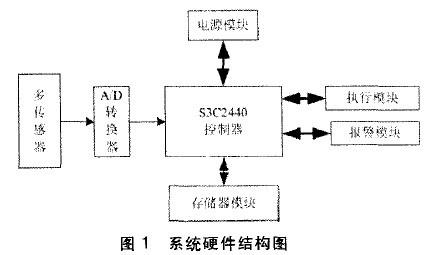
多傳感器模塊由多組傳感器組成,每組傳感器由溫度傳感器,可燃氣體探測器和煙霧探測器組成,在該系統(tǒng)中溫度傳感器采用法國HuMIREL公司的HM500,它們具有成本低、體積小、壽命長、選擇性和穩(wěn)定性好等特性;可燃氣體探測器選用了深圳市吉安達科技公司最新開發(fā)的紅外氣體傳感器,探測器安裝于被測氣體容易泄露的室內(nèi)、外危險場所,它們能夠靈敏地感知空氣中的低濃度污染氣體,分別對空氣中的異味、CO、H、O有較高的敏感度,本設(shè)計中采用的A/D轉(zhuǎn)換模塊是TI公司的12位高速并行轉(zhuǎn)換器ADS805,具有采樣速度高,穩(wěn)定性好的特點。
S3C2440控制器的核采用一款16/32-bit RISC微處理器,采用6層板工藝,具有低功耗,高速的處理計算能力的特點,簡單穩(wěn)定的設(shè)計非常適合對電源要求較高的產(chǎn)品上。采用了新的總線構(gòu)架(AMBA),其內(nèi)核為32bit的先進處理器。其主頻最高可達到533MHz,在處理大量傳感器數(shù)據(jù)情況下,完全可以保證實時性的要求。其電源管理模塊能夠提供系統(tǒng)多種電壓供電,包括芯片內(nèi)核電壓采用1.8V供電,芯片的I/O部分采用3.3V供電。而片外的一些常規(guī)集成電路又采用5V供電。智能電源管理模塊很好地解決了對系統(tǒng)各個部分供電要求的不同,降低了功耗,減少了不同電源之間的干擾噪聲,提高了系統(tǒng)的集成度。它的存儲器模塊包括兩片SDRAM共64MB和一片64MNandflash(K9F1208)并且可根據(jù)存儲容量要求選配其他容量Nandflash存儲器,存儲器模塊用來存儲系統(tǒng)運行程序和傳感器采集的火災(zāi)監(jiān)控過程的數(shù)據(jù)。
報警模塊主要當判斷有火險發(fā)生時,啟動聲光報警信號來通知值班人員,從而采取相應(yīng)的措施;執(zhí)行模塊完成火險發(fā)生時啟動附近的滅火裝置,使火災(zāi)的危害降低到最小的程度。
2 系統(tǒng)軟件設(shè)計
多傳感器信息融合的消防報警系統(tǒng)與單傳感器數(shù)據(jù)相比有很多優(yōu)點。除了將同源數(shù)據(jù)進行組合而得到統(tǒng)計上的優(yōu)勢之外,使用多種傳感器可以提高精度。多傳感器數(shù)據(jù)融合還有許多優(yōu)點,包括:可以提高報警信息的可信度。
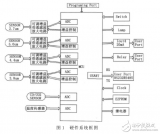
該系統(tǒng)的軟件部分主要包括系統(tǒng)的上電初始化、系統(tǒng)自檢、初始化時鐘、中斷設(shè)置、外設(shè)初始化,然后運行主程序main()函數(shù),建立任務(wù)后,擴展口對ADC進行控制切換通道采集數(shù)據(jù)。對數(shù)據(jù)進行平滑濾波、標定補償?shù)阮A(yù)處理后,來通過數(shù)據(jù)融合算法分析火災(zāi)發(fā)生情況,判斷是否報警并循環(huán)檢測。系統(tǒng)軟件流程如圖2所示。
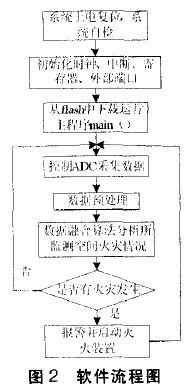
與一般的數(shù)據(jù)采集處理系統(tǒng)不同。本系統(tǒng)的數(shù)據(jù)采集軟件和數(shù)據(jù)處理軟件均在處理器上運行,系統(tǒng)軟件除了要不斷采集最新的火災(zāi)現(xiàn)場數(shù)據(jù)外,還要進行實時地數(shù)據(jù)處理。以8/16位單片機為核心的測控系統(tǒng)。程序一般采用前后臺方式編寫。后臺運行一個大的無限循環(huán)。前臺為多個中斷。這種方式在程序規(guī)模增大、系統(tǒng)功能較復(fù)雜,尤其是系統(tǒng)中的并發(fā)模塊較多的情況下,主顯得力不從心,很難保證測量、控制的實時性。而且編程困難、不便于增加功能。綜合考慮軟件復(fù)雜度、運算量、實時性要求,系統(tǒng)采用μCOS-II操作系統(tǒng)。
本系統(tǒng)中大部分任務(wù)通過調(diào)用OSTimeDly()實現(xiàn)定時運行,每個任務(wù)都可通過系統(tǒng)函數(shù)賦予不同的定時時間間隔。ADC數(shù)據(jù)采集程序,數(shù)據(jù)處理程序和數(shù)據(jù)融合算法程序主要由嵌入式C語言來編寫。
3 數(shù)據(jù)融合算法
在實際的消防報警系統(tǒng)中,由于各單傳感器的類型不同、特點不同以及各單傳感器所獲得的觀測維不同等原因,相應(yīng)的預(yù)測模型也就不同,但與此同時多個傳感器的狀態(tài)向量中又往往具有公共的向量元素,即公共維。目前,常用的信息融合方法大致分為以下幾類:一是基于估計和統(tǒng)計的經(jīng)典方法,包括加權(quán)平均法、最小二乘法和D-S證據(jù)理論等;二是信息論的融合,包括模板法、聚類分析的熵理論等;三是人工智能的融合方法,包括模糊邏輯、產(chǎn)生式規(guī)則、神經(jīng)網(wǎng)絡(luò)、遺傳算法和模糊積分理論以及專家系統(tǒng)等。
在應(yīng)用于多傳感器信息融合時,我們將A看作系統(tǒng)可能決策的集合,B看作傳感器的集合,A和B的關(guān)系矩陣R A+B中的元素μi表示由傳感器i推斷決策為i的可能性,X表示各傳感器判斷的可信度,經(jīng)過模糊變換得到的Y就是各決策的可能性。
具體的,我們假設(shè)有m個傳感器對系統(tǒng)進行觀測,而系統(tǒng)的決策可能有n個,則:
A:{y1/決策、y2/決策、…、yn/決策n}
B:{x1/傳感器、x2/傳感器、…、xn/傳感器m}
傳感器對各個決策的判斷用定義在A上的隸屬函數(shù)表示,設(shè)傳感器i對系統(tǒng)的判斷結(jié)果是:
μi1/決策,μi2/決策,…,μin/決策n,0≤μy≤1
即認為結(jié)果為決策j的可能性為μij,記作向量μi1,μi2,μi3,…μin,則m個傳感器構(gòu)成A×B的關(guān)系矩陣為:
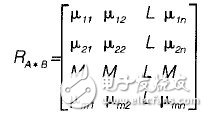
將各傳感器判斷的可信度用B上的隸屬度:X={x1/傳感器1×x2/傳感器2…、xn/傳感器n}表示,那么,根據(jù)Y=X*R A*B進行模糊變換,就可得出:y=(y1,y2,y3,…,yn)
即綜合判斷后的各決策的可能性為y,最后,對各可能判決按照一定的準則(比如最大隸屬度方法、中心法等)進行選擇,得出最優(yōu)結(jié)果。根據(jù)運算的y值,采用以下規(guī)則進行判決應(yīng)注意:①判決結(jié)果應(yīng)有最大的隸屬度。②判決結(jié)果的隸屬度與必須大于某一閥值(一般情況取0.5)。③判決結(jié)果的隸屬度與其它判決的隸屬度值的差必須大于某一閥值(比如0.1)。
4 火災(zāi)監(jiān)測的數(shù)據(jù)融合試驗
本設(shè)計對火災(zāi)監(jiān)測使用了溫度傳感器,可燃氣體探測器的煙霧探測器,數(shù)據(jù)融合的方法如圖3.
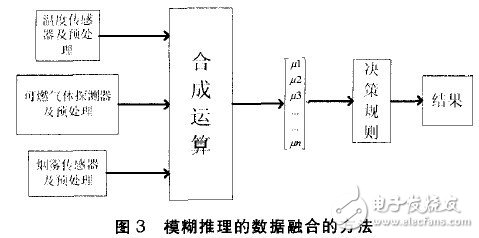
圖3基于模糊推理的數(shù)據(jù)融合的一般方法是在火災(zāi)故障監(jiān)測系統(tǒng)中,首先確定各個傳感器的權(quán)重,在設(shè)計中我們設(shè)定溫度傳感器,可燃氣體探測器的權(quán)重分別為W1=0.5,W2=0.3,W3=0.2;將最后的判決結(jié)果分為兩種:有火災(zāi)Y1和無火災(zāi)Y2;根據(jù)當前的工作狀態(tài),確定每個傳感器X對于每一判決Y的隸屬函數(shù);再進行線性變換運算,即可確定最后的結(jié)果。
從不精確的前提集合中得出可能的不精確結(jié)論的推理過程,又稱近似推理。在人的思維中,推理過程常常是近似的。例如,人們根據(jù)條件語句(假言)"若西紅柿是紅的",則西紅柿是熟的"和前提(直言)"西紅柿非常紅",立即可得出結(jié)論"西紅柿非常熟".這種不精確的推理不可能用經(jīng)典的二值邏輯或多值邏輯來完成。L.A.扎德于1975年首先提出模糊推理的合成規(guī)則和把條件語句"若x為A,則y為B"轉(zhuǎn)換為模糊關(guān)系的規(guī)則。此后J.F.鮑德溫和R.R.耶格爾等人又各自采用帶有模糊真值的模糊邏輯而提出了不同于扎德的方法。
比如,在某時刻,根據(jù)溫度傳感器的數(shù)據(jù)確定有無火災(zāi)的隸屬度分別為μ11=0.45,μ12=0.55,根據(jù)煙霧傳感器的數(shù)據(jù)確定有無火災(zāi)的隸屬度分別為μ31=0.9,μ32=0.1,采用線性變換運算得Y,
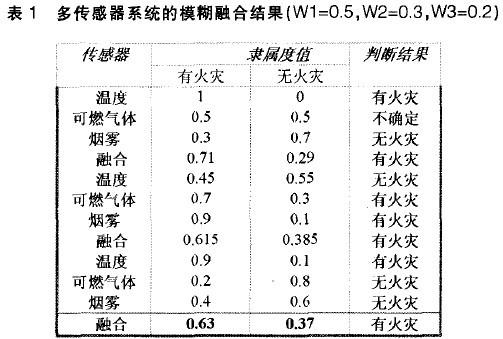
根據(jù)結(jié)果得有火災(zāi)隱患,應(yīng)該啟動氣溶滅火器。表1是模糊融合在火災(zāi)故障監(jiān)測系統(tǒng)中的試驗數(shù)據(jù)。
5 結(jié)束語
將模糊推理數(shù)據(jù)融合方法應(yīng)用到多傳感器的電纜火災(zāi)故障監(jiān)測系統(tǒng),與單一的傳感器相比,具有更高的準確性的可信度。運行結(jié)果表明,這種方法對提高火災(zāi)故障檢測的可靠性是實用和有效的,可降低火災(zāi)報警的誤報率。但是,這種方法也有一些缺點,比如傳感器的權(quán)重和每一傳感器對判決的隸屬度值的分配方面,沒有形成統(tǒng)一的理論,需要依靠經(jīng)驗進行設(shè)置。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50681瀏覽量
752021 -
控制器
+關(guān)注
關(guān)注
112文章
16203瀏覽量
177418 -
人工智能
+關(guān)注
關(guān)注
1791文章
46860瀏覽量
237587
發(fā)布評論請先 登錄
相關(guān)推薦
基于超聲波傳感器的自主移動機器人探測系統(tǒng)
無線傳感器網(wǎng)絡(luò)的傳輸系統(tǒng)怎么實現(xiàn)?
無線多傳感器網(wǎng)絡(luò)系統(tǒng)有什么組成?
分享一款不錯的基于無線傳感器網(wǎng)絡(luò)的分布式電磁探測系統(tǒng)方案
怎樣去設(shè)計一種無線傳感器網(wǎng)絡(luò)軸溫探測系統(tǒng)?
數(shù)據(jù)融合技術(shù)與多傳感器探測
氣體傳感器及其在火災(zāi)探測中的應(yīng)用
基于多傳感器數(shù)據(jù)融合的智能火災(zāi)監(jiān)控系統(tǒng)設(shè)計_郭冰陶
使用Arduino和火焰傳感器制作火災(zāi)探測系統(tǒng)

森林火災(zāi)探測系統(tǒng)的構(gòu)建
基于多傳感器數(shù)據(jù)融合的智能火災(zāi)預(yù)警系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論