 電動汽車性能分析方案之ADVISOR仿真模型
電動汽車性能分析方案之ADVISOR仿真模型
引言
為了解決世界的能源和環保問題,電動汽車的研發倍受關注。但我國電動汽車的研發工作,大多建立在對現有燃油汽車進行改裝設計的基礎上完成的。因此,為了研制出經濟、實用的電動汽車,利用先進的仿真技術對其性能進行仿真分析是非常必要的。本文在對某微型燃油汽車底盤進行改裝設計的基礎上,利用ADVISOR仿真軟件對其性能進行仿真分析,從而為該微型電動汽車的設計和產業化提供參考。
1動力系統設計及主要部件選擇
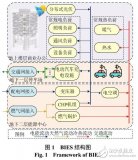
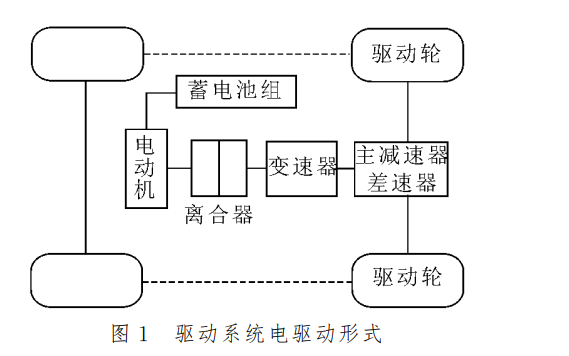
電動汽車與傳統的燃油汽車的真正區別在于動力系統。電動汽車是用電力驅動車輛,由蓄電池供電,通過電動機及控制器將電能轉化為機械能來驅動整車。由某微型燃油汽車底盤改裝設計的微型電動汽車動力系統結構如圖1所示。
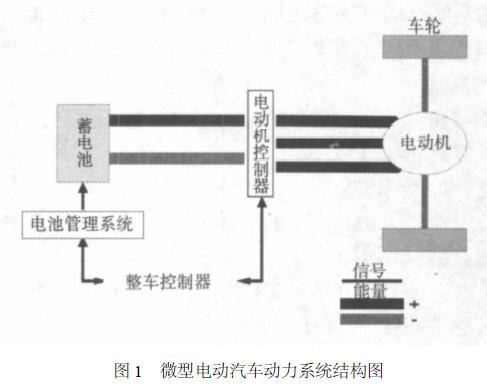
作為電動汽車的動力源蓄電池,是電動汽車的關鍵部件,決定著電動汽車的多方面性能。目前正在使用的蓄電池種類很多,如鉛酸蓄電池、鎳鉻蓄電池、鎳氫蓄電池等。其中鉛酸蓄電池具有通用、技術成熟、廉價、比能量適中、高倍率放電性能好、高低溫性能良好等優點,因而得到廣泛的應用。
電動機及驅動系統將蓄電池的能量轉換為車輪的動能,或者將車輪上的動能反饋到蓄電池中。目前正在應用或開發的電動汽車電動機主要有直流電動機、交流感應電動機、永磁無刷直流電動機和開關磁阻電動機等。而永磁無刷直流電動機不僅具有較高的重量比功率,而且集電動、發電及制動功能于一體,效率高,控制靈活,得到電動汽車領域內廣泛關注。
故本文選用以鉛酸蓄電池組和無刷直流電動機等部件構成的動力系統來替代原燃油微型汽車的內燃機和油箱。
2仿真模型的建立
2.1蓄電池系統仿真模型
本文建立的鉛酸蓄電池系統仿真模型如圖2所示。該模型描述了儲存在蓄電池內的能量接受請求功率,從蓄電池中返回可用功率或實際功率的過程。
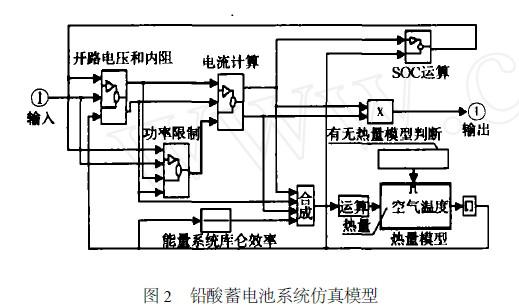
它主要包括以下模塊:
1)開路電壓和內阻的計算模塊。在電動汽車仿真中,最常見的蓄電池模型是內阻模型。該模型將蓄電池看成一個理想電壓源串聯一個內阻的等效電路,其電壓特性為:

式中:Voc為開路電壓(V);U為電池工作電壓(V);R為電池等效內阻(Ω)。
由(1)式可計算出在給定荷電狀態(SOC)和請求電池功率狀態下的開路電壓Voc和內阻R。
2)電流計算模塊。電流計算是通過一個二次方程求解得到的,即:

式中P為功率。
3)功率限制模塊。此模塊用來限制請求功率不得超過電池功率。
4)SOC運算模塊。荷電狀態(SOC)的數值可用下式計算:
SOC=(初始電量-已用電量)/初始電量 (3)
其中,已用電量采用安培時間積分法計算。
5)熱量模塊。在電動汽車行駛和充放電時,熱量模塊主要用來預測以時間為函數的電池溫度。
2.2電動機及驅動系統仿真模型
電動機及驅動系統的建模基礎是電動機的電壓、轉矩、功率的平衡方程和運動特性方程。若假定繞組完全對稱、主電路電流連續、磁阻恒定、忽略粘性摩擦,則可得到無刷直流電機的電壓平衡方程:
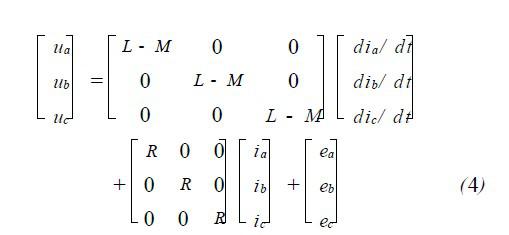
式中:ua、ub、uc分別為定子相繞組電壓(V);ia、ib、ic分別為定子相繞組電流(A);ea、eb、ec分別為定子相繞組電動勢(V);R為每相繞組的電阻(Ω);L為每相繞組的自感(H);M為每兩相繞組間的互感(H)。
根據電壓平衡方程式(4)可以得到電動機的等效電路圖,如圖3所示。
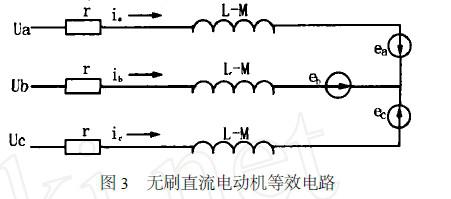
這樣,電動機的電磁轉矩Tem為:

式中Ω為轉子機械角速度。
基于上述分析,本文建立了永磁無刷直流電動機及驅動系統的仿真模型,如圖4所示。它主要由以下4個模塊構成:
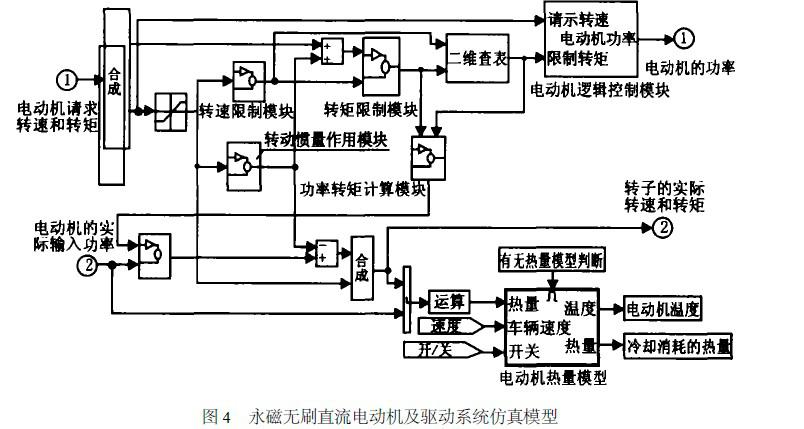
1)轉速限制模塊。
該模塊主要用來預測電動機的請求轉速是否超過了電動機的轉速范圍。當vveh>vcyc時,輸出的轉速為電機的最大轉速;當vveh
ωa=va·ωlim/vavail
式中:vcyc為循環工況的請求車速;vveh為車輛模型計算的車速;va為實際車速;ωlim為受限制的需求轉速;vavail為驅動系統可達到的理論車速。
2)轉動慣量的作用模塊。
該模塊主要是考慮電動機等轉動部件的轉矩消耗。它根據驅動系統的整體傳動比,計算電動機慣量與整車慣量的函數關系,最后根據輸入的轉速計算轉動慣量。
3)轉矩限制模塊。
該模塊主要是限制電動機的請求轉矩不能超出電動機的轉矩范圍。它根據最大轉速所對應的最大轉矩,分別計算出作為電動機或發電機使用時的最大轉矩,再根據關系比較得出輸出的最大轉矩,建模關系為:當Treq>0時,工作在電動機狀態,T=min(Treq,Tmax);當Treq<0時,工作在發電機狀態,T=min(Treq,Tgen·max)。其中Treq為請求的電動機轉矩;Tmax、Tgen·max分別為最大充電轉矩和最大發電轉矩。
4)熱量模塊。
該模塊是用來計算電動機的溫度和為保持某一溫度所采用的散熱方式的熱功率損失。
2.3整車仿真模型
ADVISOR的仿真模型是直接按照實際動力系統的布局搭建,其中整車仿真模型包括循環工況、車輛、車輪、變速器、驅動電機系統、能量源等子模塊。
各個子模塊都建立了一個Simulink仿真模塊,且能夠通過M函數來控制其參數的變化。本文建立的整車仿真模型,如圖5所示。
3整車動力性能仿真
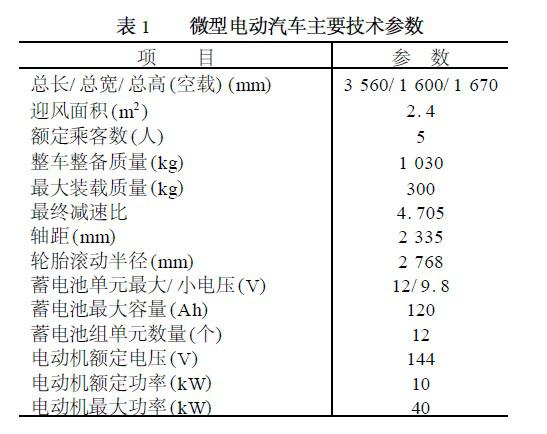
3.1整車的技術參數
改裝后的微型電動汽車主要的技術參數如表1所示。
3.2循環工況的選擇
本文選擇美國環境保護署EPA制訂的城市道路循環UDDS(UrbanDynamometerDrivingSchedule)作為循環工況。其循環時間為1367s;行駛路程為11.99km;最高車速為91.25km/h;平均車速為31.51km/h;最大加速度為1.48m/s2;最大減速度為-1.48m/s2;空載時間為259s;停車次數為17。
3.3仿真結果
根據以上技術參數,采用UDDS循環工況對已建立的整車仿真模型進行仿真,仿真結果分別如表2和圖6所示。
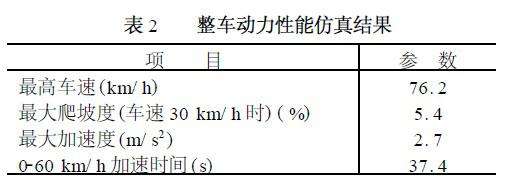
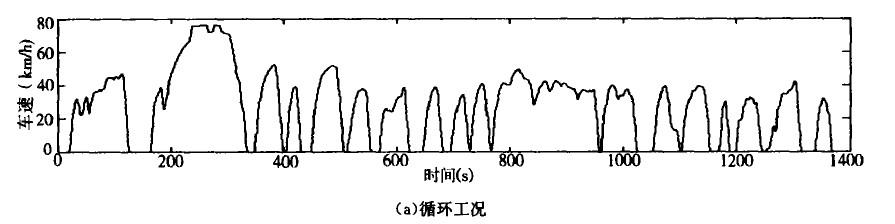
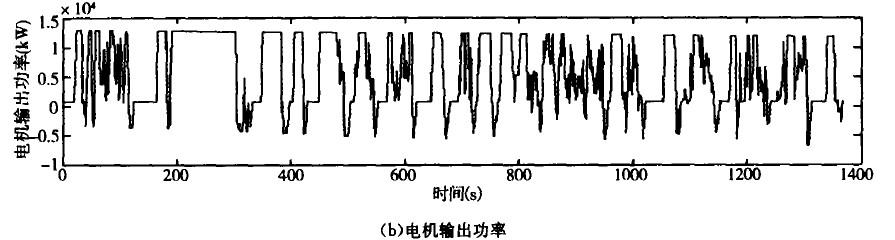
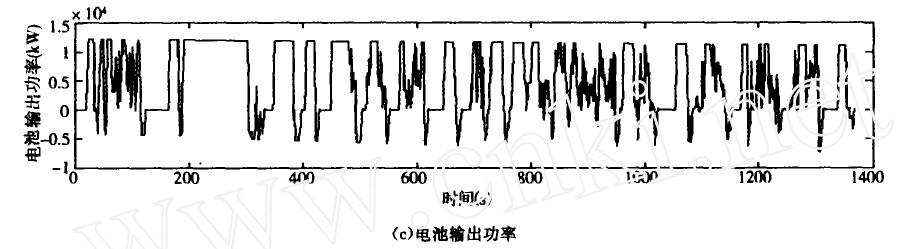
圖6(a)為整車車速隨時間的變化,最高車速為76.2km/h,仿真結果顯示實際車速能夠很好地跟蹤循環工況車速。圖6(b)、(c)為電動機和蓄電池能量源的輸出功率,整個驅動循環中電動機輸出功率有正有負,負值反映了電動機工作在發電的狀態下。蓄電池的輸出功率也是有正有負,負的功率反映了蓄電池是工作在充電的狀態。圖6(d)為蓄電池的SOC值變化,曲折的曲線表明,車輛在頻繁加減速的工作過程中,是可以回收能量給蓄電池充電的。
4結語
通過對某微型燃油汽車底盤進行改裝設計并利用ADVISOR仿真軟件進行大量的仿真分析,說明該車的動力系統設計方案是實用、可行的。通過仿真分析可以看到,該電動汽車在行駛、加速、制動等方面都能夠適應城市的交通狀況,這對電動汽車研發和產業化具有重要的參考價值。
-
電動汽車
+關注
關注
156文章
11946瀏覽量
230504 -
蓄電池
+關注
關注
20文章
1521瀏覽量
70338 -
電動機
+關注
關注
74文章
4090瀏覽量
96021 -
仿真
+關注
關注
50文章
4044瀏覽量
133422
發布評論請先 登錄
相關推薦
電動汽車
電動汽車的高性能運行離不開這項試驗
混合電動汽車和電動汽車的功能電子化方案
純電動汽車電機嘯叫噪聲解析
電動汽車熱管理系統和性能
建立增程式電動汽車整車仿真模型
優化電動汽車的結構性能
電動汽車復合電源的建模與仿真研究相關資料下載
基于stm32的電動汽車交流充電樁設計與實現

電動汽車輔助服務方案
使用ADVISOR電動汽車仿真軟件設計電動汽車驅動系統的資料說明
電動汽車仿真系列-電動汽車復合電源的建模與仿真研究






 工商網監
工商網監
評論