") VACON變頻器應用于回轉(zhuǎn)控制系統(tǒng)中的優(yōu)點
VACON變頻器應用于回轉(zhuǎn)控制系統(tǒng)中的優(yōu)點
1 引言
現(xiàn)在,我國的建筑用塔式起重機已越來越普遍,從普通的多層建筑、房地產(chǎn)工程、高層建筑到大型的鐵路工程、橋梁工程、電力工程、水利工程,到處都有塔機的應用。計算機輔助設計、微電子技術、程控語言控制技術都在塔機上得到了應用。其中啟升機構、回轉(zhuǎn)機構、小車變幅機構的控制發(fā)展趨勢是采用變頻器控制。回轉(zhuǎn)機構的特點是具有較大的慣性沖擊,啟動過快沖擊大,停車和打反轉(zhuǎn)都不允許過快過急,否則不僅運轉(zhuǎn)不平穩(wěn),還會損壞機構。更好的解決辦法是采用回轉(zhuǎn)專用減速機,同時采用變頻調(diào)速使起制動最平穩(wěn)。并且采用變頻器控制以后使系統(tǒng)控制更為簡單,控制系統(tǒng)具有多重保護,使系統(tǒng)更加安全可靠。
2 塔吊回轉(zhuǎn)機構工作原理小齒輪
塔吊是靠起重臂回轉(zhuǎn)來保證其工作覆蓋面的,回轉(zhuǎn)運動的產(chǎn)生是通過上、下回轉(zhuǎn)支座分別裝在回轉(zhuǎn)支承的內(nèi)外圈上,并由回轉(zhuǎn)機構驅(qū)動小齒輪,小齒輪與回轉(zhuǎn)支承的大齒圈嚙合,帶動回轉(zhuǎn)上支座相對于下支座運動。大齒圈需要兩至四個小齒輪驅(qū)動,小齒輪均勻放在大齒圈四周,如圖1所示。
塔機回轉(zhuǎn)慣性很大,回轉(zhuǎn)起、制動時往往會有慣性沖擊。為保證回轉(zhuǎn)平穩(wěn),回轉(zhuǎn)機構工作特性要軟,回轉(zhuǎn)加減速度一定要小,要求驅(qū)動小齒輪的電動機之間保持同步。
圖1 小齒輪與大齒圈嚙合示意圖
3 回轉(zhuǎn)同步控制原理
為實現(xiàn)驅(qū)動小齒輪的電動機之間保持同步,采用具有同步控制應用宏的vacon變頻器。vacon變頻器具有可編程功能,有專用于起重機的起升應用宏和回轉(zhuǎn)主從同步控制應用宏,具有優(yōu)良的控制性能。
vacon變頻器主從同步控制應用宏是為采用nxp系列變頻器且電機軸之間由齒輪、鏈條、皮帶等連接的應用系統(tǒng)而設計的。
外部控制信號只提供給主nxp變頻器,主變頻器經(jīng)過系統(tǒng)總線控制從變頻器。主變頻器采用典型的速度控制,其它的從變頻器是轉(zhuǎn)矩或速度參考。
從變頻器轉(zhuǎn)矩參考控制用于當主變頻器與從變頻器軸之間為剛性連接時,如齒輪、鏈條連接,以便驅(qū)動之間沒有速度差別。從變頻器速度參考控制用于當主變頻器與從變頻器軸之間柔性連接時,以便驅(qū)動之間略為有速度差別。
主從變頻器通過擴展卡nxoptd2連接,擴展卡之間同過光纜實現(xiàn)通訊。變頻器在這種連接方式下,最左邊的為主變頻器,其他的為從變頻器。在主變頻器上的擴展板nxopd2是默認的跳線選擇,如x6:1-2, x5:1-2。在從變頻器上的擴展板nxopd2是必須改成如下的跳線選擇,如x6:1-2, x5: 2-3。每臺變頻器驅(qū)動各自電機,通過主從控制功能實現(xiàn)同步控制。
3.1 主從同步控制參數(shù)設計
主從同步控制參數(shù)組設計了主從系統(tǒng)功能,主從參數(shù)通訊中沒有經(jīng)過系統(tǒng)總線從從機反饋給主機的信號,推薦把從機的故障輸出信號連接到主機外部故障輸入端。系統(tǒng)總線通訊中丟失從機將觸發(fā)#81系統(tǒng)總線錯誤,如果主機報警從機將報#80錯誤。參數(shù)敘述如下:
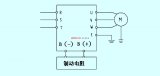
圖2 變頻器間的系統(tǒng)連接圖
p2.12.1 主從選擇:此參數(shù)定義了主從連接的驅(qū)動關系。主機次參數(shù)設定為master,主機將通過光纖通道傳輸主從控制字,速度參考,轉(zhuǎn)矩參考等。從機次參數(shù)設定為follower同時把控制位置參數(shù)p3.1設定為systembus.
p2.12.2 本機系統(tǒng)總線id號:用于系統(tǒng)總線驅(qū)動。0~63每臺驅(qū)動器都有唯一的本機系統(tǒng)總線id號。
p2.12.3 從機系統(tǒng)總線id號:主從通訊中下一臺驅(qū)動器。
p2.12.4 系統(tǒng)總線通訊速度:設置系統(tǒng)總線通訊速度。0=1.5 mbit/s 1=3mbit/s
p2.12.5 轉(zhuǎn)矩模式選擇:主機是典型的速度控制。參數(shù)可選如下:
0=不用
1=速度控制:當主從電機軸是柔性連接時,主機從機都可設置成此參數(shù),以便允許主機從機之間速度有一些差別。
2=轉(zhuǎn)矩控制:轉(zhuǎn)矩控制驅(qū)動。當主從電機軸是剛性連接時(用齒輪或鏈條)此參數(shù)用于從機選擇,以便主機從機之間沒有速度差別。
3=轉(zhuǎn)矩參考和速度控制器輸出中最小值:轉(zhuǎn)矩選擇器比較轉(zhuǎn)矩參考值和速度控制器輸出值。用其中較小值作為電動機轉(zhuǎn)矩參考。只在特殊情況使用。
4=轉(zhuǎn)矩參考和速度控制器輸出中最大值:轉(zhuǎn)矩選擇器比較轉(zhuǎn)矩參考值和速度控制器輸出值。用其中較大值作為電動機轉(zhuǎn)矩參考。只在特殊情況使用。
p2.12.6 轉(zhuǎn)矩標定:對應于電機額定轉(zhuǎn)矩。默認值1000。此參數(shù)轉(zhuǎn)矩參考的標定因子。選擇1000對應于額定轉(zhuǎn)矩參考。
p2.12.7 負載分配比例:負載分配轉(zhuǎn)矩參考的百分數(shù)。如設定100%=驅(qū)動器間根據(jù)額定轉(zhuǎn)矩分配負載。
p2.12.8 轉(zhuǎn)矩參考源選擇:從機轉(zhuǎn)矩參考源。
0=不用
1=主機
2=現(xiàn)場總線
3=模擬1信號
4=模擬2信號
p2.12.9 從機參考頻率:從機速度參考源。
0=從機本身參考頻率
1=主機參考頻率
2=主機輸出斜坡(從機斜坡不起作用)
3.2 實驗調(diào)試結果分析
此控制系統(tǒng)應用在沈陽建筑機械廠k520塔吊上,回轉(zhuǎn)控制圖1中用4四個小齒輪分別用4臺11kw電動機驅(qū)動,4臺電動機分別由4臺vacon變頻器驅(qū)動,構成主從控制,變頻器1為主控制器設定為速度控制,其他3臺變頻器為從控制器設定為轉(zhuǎn)矩控制。工作中4臺電機的轉(zhuǎn)矩基本相等,回轉(zhuǎn)起、停控制平穩(wěn),控制效果達到要求,用戶滿意。
4 結論
應用變頻器的回轉(zhuǎn)控制系統(tǒng)有如下優(yōu)點:
回轉(zhuǎn)起、停控制平穩(wěn),由于采用芬蘭瓦薩控制系統(tǒng)有限公司的vacon變頻器,用其開放式編程平臺,開發(fā)的主從同步控制應用宏,使控制系統(tǒng)具有優(yōu)良的控制性能。同時系統(tǒng)運行安全,性能可靠,電動機發(fā)生過載、過壓、過流時,變頻器會及時給出報警,停止系統(tǒng)工作。高效節(jié)能,在變頻器控制下,電動機大部分時間沒有達到額定轉(zhuǎn)速,節(jié)能效果明顯。采用變頻器控制塔吊的回轉(zhuǎn),回轉(zhuǎn)性能優(yōu)越,具有很好的推廣價值。
-
控制系統(tǒng)
+關注
關注
41文章
6420瀏覽量
110105 -
變頻器
+關注
關注
251文章
6392瀏覽量
142469 -
可編程
+關注
關注
2文章
810瀏覽量
39598
發(fā)布評論請先 登錄
相關推薦
變頻器-PLC 在供水控制系統(tǒng)的應用
變頻器技術工業(yè)鍋爐控制系統(tǒng)中的應用
Vacon低壓變頻器應用分析
變頻器應用中的發(fā)熱噪聲諧波問題及應對措施
增容型變頻方案與Vacon變頻器的完美結合

VACON? 20變頻器安裝及調(diào)試

變頻器和PLC在四輥軸交流傳動控制系統(tǒng)中的應用
PID控制系統(tǒng)在變頻器中的應用實例
變頻器控制系統(tǒng)的基礎知識
變頻器在污水處理自動控制系統(tǒng)中的應用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論