 采用TMS32OF2812芯片實現多通道嵌入式振動主動控制系統設計
采用TMS32OF2812芯片實現多通道嵌入式振動主動控制系統設計
引言
在現代艦船和空間飛行器上,低頻振動是困擾人們的一大難題,如何快速消除振動,降低危害,成為人們比較關注的問題。振動抑制的方法主要有振動被動控制和振動主動控制,振動被動控制雖然不需要外界提供能量,容易實現,但對低頻振動控制能力有限,對突發環境應變能力差;而振動主動控制則有較大的靈活性,對低頻振動抑制的效果尤其好,成為人們重點研究的方法。
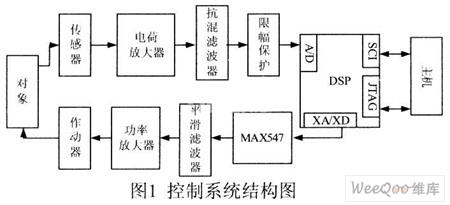
本文針對某類結構的低頻振動控制,設計了以TMS320f2812(以下簡稱F2812)為核心,包含傳感器、調理電路、D/A轉換電路、功率放大器和作動器的多通道嵌入式振動主動控制系統,結構如圖1所示。首先傳感器拾取振動信號,經過電荷放大器轉換調理為0~3V的電壓信號,再經濾波和限幅保護送至DSP內部A/D轉換模塊進行模一數轉換。DSP根據采集的各路振動信號,運行控制算法輸出控制量,經過D/A轉換電路和功率放大器轉換成直接作用在被控對象上的力或力矩,抑制或消除對象振動。為了減小D/A轉換階梯信號產生的高頻噪聲,又加入了平滑濾波處理。DSP通過JTAG口、仿真器與主機相連,進行控制算法的編譯和載入,通過內置SCI模塊與主機串行通信,向主機傳送振動信號和控制量,以便對控制過程分析*價,對算法改進完善。
1 硬件設計
F2812是一款適用于自動控制的高性能芯片,具有32位定點處理器,150MHz時鐘頻率,18K×16位的SARAM和128K×16位的Flash存儲器,硬件實現乘法運算,處理速度較快;另外具有一些適用于控制系統的內設和接口,如16通道的12位A/D轉換器,外部存儲器并行接口,SCI串行通信接口和JTAG仿真器接口等,因此在本系統中也選用對電纜分布電容要求不高的電荷放大器作為前置放大器;作動器可以是壓電器件,也可以是電磁作動器件,根據對象的需求,需要配置相應的功放。F2812本身不具有D/A轉換模塊,本文利用MAX547設計實現了F2812的D/A轉換電路,可以同時輸出8路模擬信號。
1.1 電荷放大器
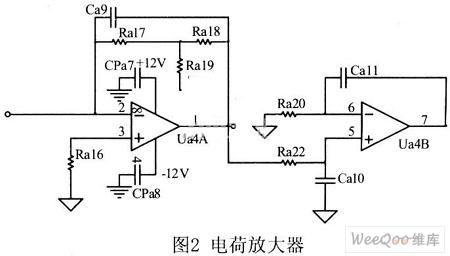
常用的電荷放大器是一個具有直流反饋的反相積分電路,若要改善電路的低頻特性,需要增大直流反饋電阻的阻值,為此我們采用了T型網絡來實現較大阻值。如圖2所示,Ral7、Ral8和Ral9組成T型網絡,等效電阻為:

通過調整Ral7、Ral8和Ral9的大小,可以獲得較大的阻值。但在調試的過程中,我們發現隨著測量時間的延長,輸出仍然會漂移至飽和,為此我們又利用一個一階同相積分環節取出輸出的直流分量,反饋至Ral9的一端,形成自跟隨網絡,如圖2左半部分所示。使用中積分電容要選擇漏電流比較小、溫漂小、性能比較穩定的電容,放大器要選取高增益、高輸入阻抗、低偏置電流、低溫漂的運算放大器,才能保證電荷放大器的性能。
1.2 濾波保護電路
在振動主動控制實際應用中所關心的信號頻率一般在0.5~200Hz之間,為了濾除低頻漂移和不必要的高頻信號,本文設計了一個五階貝塞爾(Bessel)低通和一個一階高通組成的帶通濾波器,五階貝塞爾低通又分別由兩個二階低通和一個一階低通組成,它們的參數分別為:通帶增益1,截止頻率475Hz,Q值0.577;通帶增益1,截止頻率565Hz,Q值O.737;通帶增益1,截止頻率530Hz,一、二級二階低通由單位增益KRC電路實現。
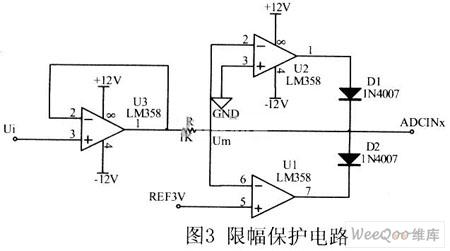
信號在進入DSP的ADC之前應采用加法比例電路調整到0~3V之間,低于0V或超出3V均有損壞DSP的危險,為此我們又加了一個限幅保護電路,如圖3所示。
1.3 D/A轉換電路
本文采用MAX547為核心器件設計實現了F2812的D/A轉換電路。MAX547內部包含8個13位的電壓輸出型D/A轉換器,每個DAC之前均有一個輸入鎖存器和DAC鎖存器,可以分別單獨選通,進行8路D/A轉換。每兩路DAC共用一個參考電壓,共需要4個獨立外部參考電壓。MAX547接口信號有3位地址線,分別對8個通道編址選擇,有13位數據線,有片選/CS、寫入/WR、異步輸入/LD和清零/CLR等控制信號,控制信號均是電平觸發。這些接口信號均與TTL/CMOS電平匹配,故F2812可直接與MAX547相連而不需進行電平轉換。MAX547是±5V雙電源供電,輸出電壓擺幅-4.5 V~4.5V。
當MAX547的寫信號/WR和片選信號/CS均為低電平時,并且A0、A1、A2地址信號有效,則對應通道的輸入鎖存器開通,從數據線上讀取轉換數值,當/WR和/CS其中一個變為高電平時,數據便被鎖入相應輸入鎖存器。/LD負責開關DAC鎖存器,當/LD為低時,DAC鎖存器開通,數據由輸入鎖存器進入DAC鎖存器,當/LD變為高電平時,數據便保持在DAC鎖存器中,由DAC進行數一模轉換。當/LD、/WR和/CS均為低時,數據可以直接傳至DAC鎖存器,但/LD應比/WR推遲50ns反轉高電平。/CLR則可以把DAC轉換內容設置成1000H,使模擬輸出AGND電壓。
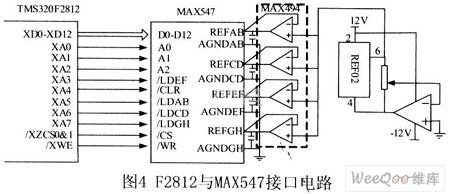
F2812具有外部接口(XINTF),可以映像五個獨立的外部存儲空間,每個存儲空間都有一個片選信號。把MAX54.7的8個通道地址分配在外部存儲區域0,通過外部接口總線與F2812的連接如圖4所示。要想啟動MAX547內部DACA、DACB、DACC、DACD、DACE、DACF、DACG、DACH進行數-模轉換,則分別向地址D9H、B2H、B3H、F4H、F5H、7EH、7FH寫入需要轉換的數據即可。對于MAX547需要的四個獨立參考電壓,系統中采用一個精密基準電壓芯片REF02提供標準電壓,經過四個電壓跟隨器進行緩沖。REF02輸出5V標準電壓,經過轉換以后,可以輸出大小可調的標準電壓。跟隨器選用MAX494,在PCB設計時,為減小電路引線的干擾,最好把MAX494運放的輸入端直接與MAX547參考電壓輸入端相連,如圖4所示。另外為了減小D/A轉換階梯波造成的高頻噪聲,還設計了低通濾波器。
1.4 RS232接口
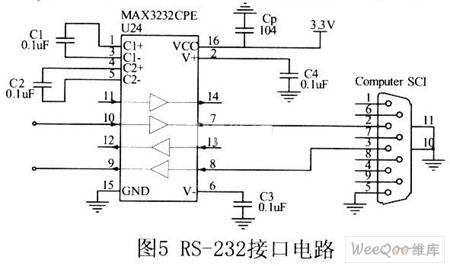
F2812內部有兩個異步串行接口(SCI),每個都有收發緩沖寄存器、收發移位寄存器和用于接受發送的16級深度FIFO。接收和發送的波特率可以編程設定,最高可達64K。系統中F2812需要通過SCI與主機通信,而F2812外圍接口是3.3VCMOS色平,計算機串口是RS-232電平,故兩者之間需進行電平轉換。MAX3232是一款常用的RS-232電平轉換芯片,接口電路如圖5所示。
2 軟件設計
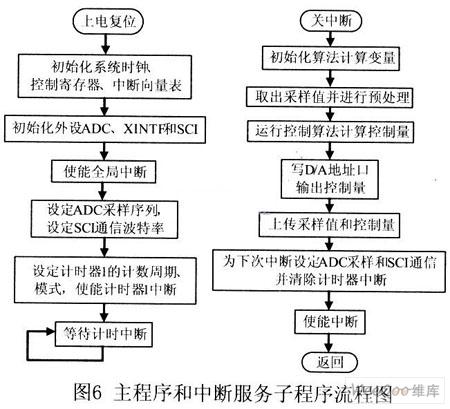
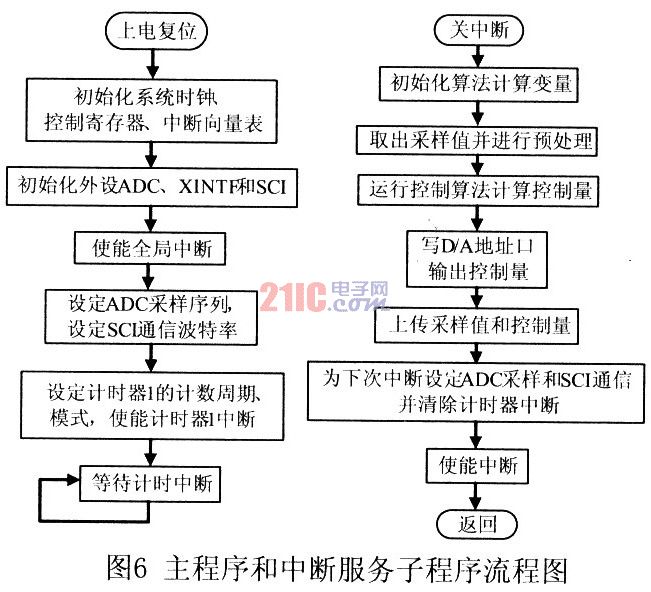
DSP控制算法由主程序和中斷服務子程序兩部分組成,程序流程圖如圖所示。在主程序中,主要是初始化系統控制寄存器、看門狗、系統時鐘、GPIO口、中斷向量表和一些外設等,設置ADC的采樣序列、SCI的通信波特率和外部存儲器接口的訪問時序,然后設置計時器的計時周期、計數模式和計時中斷等,進入等待計時中斷狀態。中斷服務子程序主要完成以下功能:首先關中斷,初始化計算變量;接著對ADC相應通道的輸入信號進行A/D轉換,取出采樣值預處理,運行控制算法計算出控制量,通過寫D/A的通道地址輸出控制量進行D/A轉換,最終輸出控制模擬信號驅動作動器減振;通過SCI與主機通信,上傳振動信號和控制量;最后則對ADC、SCI和計時器中斷進行相關設置,開全局中斷,為下次運行中斷服務子程序做準備。中斷服務子程序運行完畢則返回主程序,進入等待中斷狀態,等待下一次的計時中斷,如此循環往復。
3 總結
本文設計的以TMS320F2812為控制核心的嵌入式振動主動控制系統,利用F2812內置的A/D模塊可以同時采集多路振動信號,利用MAX547實現的D/A轉換電路可以輸出8路控制信號,能夠實現多輸入多輸出的振動主動控制,貼近工程實用。利用本系統已經對一個艦船浮筏成功地進行了多輸入多輸出振動主動控制。
-
芯片
+關注
關注
453文章
50406瀏覽量
421817 -
放大器
+關注
關注
143文章
13553瀏覽量
213111 -
嵌入式
+關注
關注
5068文章
19019瀏覽量
303276 -
控制系統
+關注
關注
41文章
6546瀏覽量
110480 -
振動主動控制
+關注
關注
0文章
8瀏覽量
1325
發布評論請先 登錄
相關推薦
基于TMS320F2812的光電色選系統介紹
用于振動主動控制的DSP系統設計與實現
用于振動主動控制的DSP系統設計與實現

基于TMS320F2812的汽車動力控制系統

采用嵌入式系統實現AGV控制系統的設計
基于TMS320LF2407A DSP的嵌入式網絡控制系統
基于FreeRTOS的嵌入式云臺控制系統設計






 工商網監
工商網監
評論