 電機限流軟啟動自整定模糊控制器系統設計與仿真分析
電機限流軟啟動自整定模糊控制器系統設計與仿真分析
1 引言
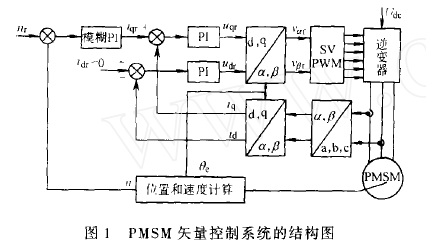
三相異步電機應用廣泛,但是直接全壓啟動時電流很大(6-8倍),傳統的方法采用如Y-△轉換、自耦變壓器及定子回路串電抗等降壓啟動方法來減小啟動電流,啟動設備的啟動參數一般無法調整,使其負載的適應性較差。而電機軟啟動的方式具備無沖擊電流、啟動參數可調、有軟停機功能、輕載節能等優點逐漸被廣泛應用。各啟動方式對電網的影響示意圖如圖1所示。

目前,軟啟動方式主要采用晶閘管交流調壓的方法。在電動機起動過程中通過控制晶閘管觸發角的大小,可使電動機的定子端電壓和起動電流根據工作要求設定的規律進行變化。電動機的起動方式和起動電流均可任意調整和設置,使之處于最佳的起動過程。常用的晶閘管調壓控制電路如圖2所示。
本文介紹參數自整定模糊控制技術在限流軟啟動中的應用,利用模糊推理、模糊決策對電動機啟動過程中電流大小進行控制,實現了系統平穩啟動。
2 模糊控制的方案
電機軟啟動傳統的方法是采用閉環PID控制對電動機進行限流軟起動。但是由于異步電動機啟動過程是非線性時變系統,采用PID閉環控制并不能很好的解決異步電動機起動過程中電流沖擊問題。所以,本文采用快速調節能力強的參數自整定模糊控制技術應用于電機軟啟動的控制中。模糊控制作為智能控制的一種方法,它最大的優點就是不依賴于被控對象的精確的數學模型,能夠克服系統非線性因素的影響,對被控對象參數的變化具有較強的魯棒性。
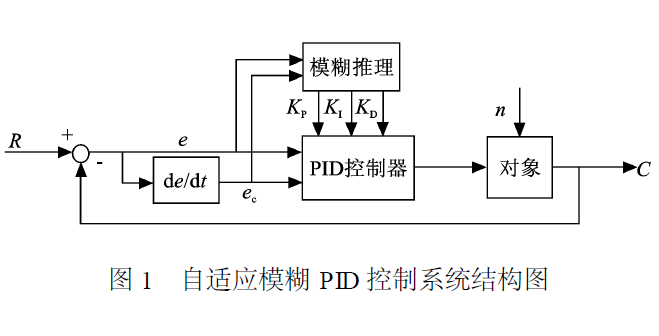
3 基于自整定模糊控制系統的結構
常規模糊控制器具有響應時間短,超調量小,魯棒性好,適于非線性時變的復雜系統,建立模型相對容易等優點。
模糊控制器具有良好的動態品質,同時也還存在一些問題:首先,常規的模糊控制器的控制規則建立之后就固定不變,難以獲得最優控制指標。相對于電動機軟起動過程這類復雜的被控對象,采用這種控制器不能獲得預期的控制效果,而且適應系統和環境變化的能力差。
為此我們采用參數自整定模糊控制技術,在運行過程中根據實際偏差和偏差變化率的大小,控制器選取不同的Ka、Kb、Kc以滿足動、靜態性能的不同要求。而且,基于量化、比例因子自調整方法,由于算法簡單高效,控制效果較好,很適合電動機軟啟動這類對控制的實時性要求較高的系統。
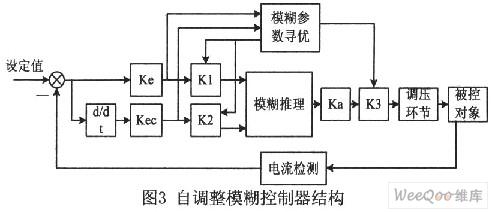
如圖3所示,考慮系統控制情況,選電流偏差e、偏差變化率ec為輸入變量、晶閘管觸發角的變化值a為輸出量。當量化因子Ke、Kec和比例因子取為常數時,可調整因子K1、K2、K3通過尋優的方法,不斷更新K1、K2、K3的值從而完成模糊控制規則的自調整,使模糊控制系統有最佳的動態性能。
4 模糊控制參數的選擇
4.1 模糊隸屬函數
本模糊控制器采用二維模糊控制,主模糊控制單元和模糊參數尋優控制單元都以異步電動機的輸出電流與期望值的偏差e及偏差變化率ec作為輸入變量,其中主模糊控制單元輸出變量為晶閘管觸發角a的變化值。模糊參數尋優控制單元的輸出可調整因子K1、K2、K3分別表示量化因子Ke、Kec以及比例因子Ka的調整系數值。
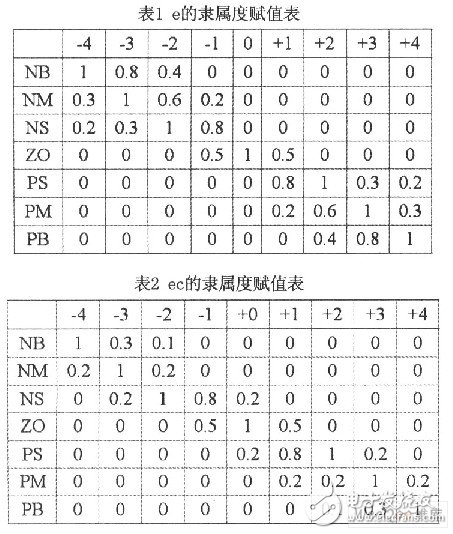
e、ec以及模擬控制器的輸出a的論域取{-4,-3,-2,-1,0,+1,+2,+3,+4),將其大小量化為9個等級。在模糊控制區內將電流偏差分為7個模糊子集,即Ke的語言變量{負大,負中,負小,零,正小,正中,正大),簡記為{NB,NM,NS,ZO,PS,PM,PB)。
為了運算簡便,對于輸入輸出變量采用簡單的三角形隸屬度函數。隸屬度函數賦值表如下表所示:

4.2 模糊控制規則
綜合考慮電流偏差Ke和電流偏差的變化率Kec2羞兩個信號,采用的模糊推理規則的形式如下:
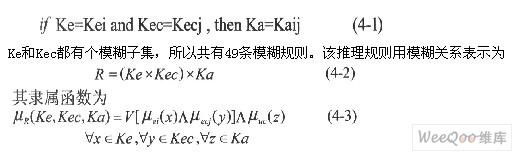

相應的模糊控制規則總表如表4所示
解模糊使用的重心法,又稱加權平均法。其解模糊公式如下:

4.3 模糊控制器參數自整定
在啟動過程中遵循的自整定規則如下:
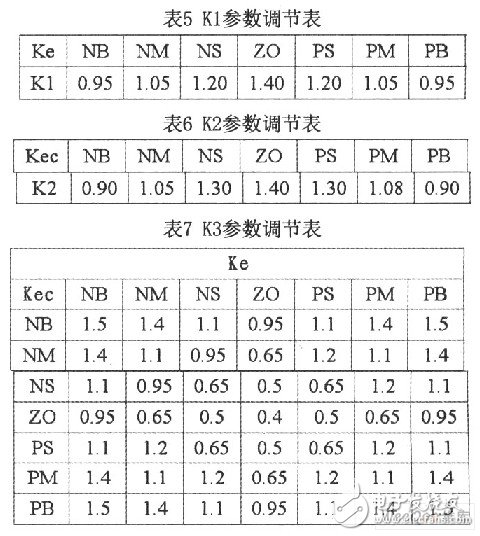
當e和ec較大時,縮小K1和K2,降低對大偏差的分辨率,減少偏差,縮短過渡過程時間。當e和ec較小時,系統已接近穩態,這時應增大K1和K2,提高系統對小偏差的分辨率,提高控制的靈敏度;當誤差e較大,且與誤差變化ec符號相反時,應適當增大控制器k3的大小。當誤差e較大,且與誤差變化ec符號相同時,系統響應正加速偏離設定值,為減小這種不利趨勢,也應適當減小K3。系統響應在設定值附近時(此時誤差e較小),為防止產生較大的超調或欠調,K3應該具有較寬的變化范圍。適當減小比例因子以減小超調。經過多次仿真和實驗,隨著偏差Ke和偏差變化率Kec的變化,K1、K2和K3分別按表5、6、7取值,可以得到理想的控制結果。
5 系統仿真與分析
利用MATLAB的Simulink和SimpowerSystems、FuzzyLogicToolbox等工具進行的系統仿真。
5.1 仿真模型的建立
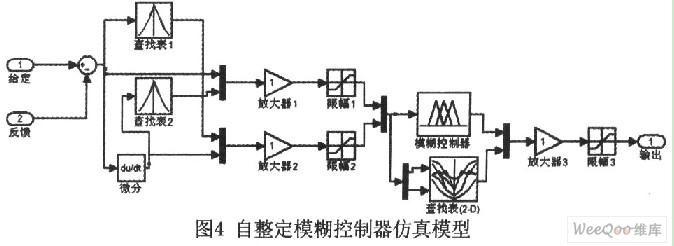
結合上述的方法建立的自整定模糊控制器仿真模型如圖4:
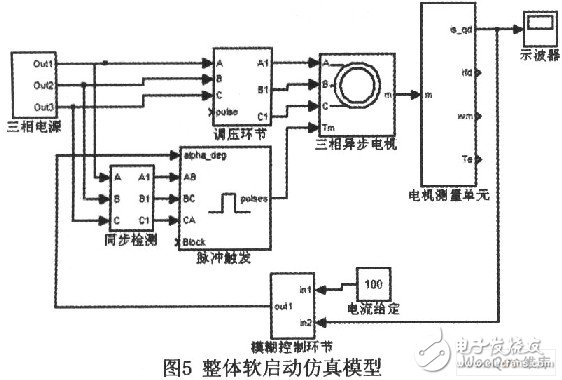
結合三相電源模塊、同步環節模塊、脈沖發生環節模塊、三相交流調壓環節模塊以及控制環節得到整體軟啟動仿真模型如圖5。
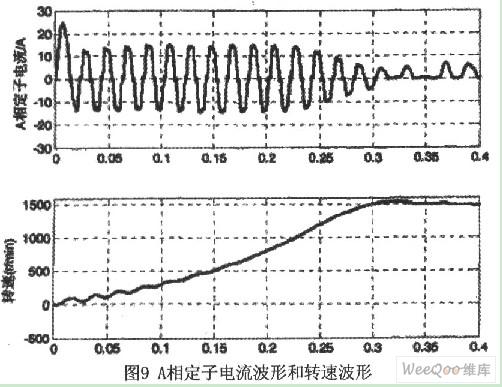
將采用傳統PID控制器獲得的響應曲線和采用自整定模糊控制器獲得的響應曲線對比可知,采用自整定模糊控制器獲得的控制效果更為理想,具體表現為:超調量較小、啟動過程平穩,其輸出量幾乎和給定量達到重合。通過以上的對比可知,自整定模糊控制器的控制性能優于傳統PID控制的控制性能,同時,也說明了本文設計的自整定模糊控制器獲得了較好的控制效果。
6 小結
本章結合電動機軟啟動的特性在吸取自適應和模糊控制算法各自優點的基礎上,介紹了限流軟啟動自整定模糊控制器設計的整個過程;并對整個軟啟動控制系統進行了動力學建模,最后,利用MATLAB的power system模塊庫以及Simulink模塊庫建立仿真模型功能進行了系統仿真,仿真結果表明,自整定模糊能夠在軟啟動控制上取得較好的動、靜態性能。
-
控制器
+關注
關注
112文章
16203瀏覽量
177413 -
電機
+關注
關注
142文章
8933瀏覽量
145097 -
PID
+關注
關注
35文章
1471瀏覽量
85289
發布評論請先 登錄
相關推薦
模糊自整定PID 控制器在再熱汽溫控制中的應用研究
如何基于模糊推理的參數自整定PI控制器引入到PMSM矢量控制系統中






 工商網監
工商網監
評論