 雙電機的偏差耦合控制算法的仿真分析和比較
雙電機的偏差耦合控制算法的仿真分析和比較
1.引言
隨著工業技術的發展,在航空、軍事、機械制造領域等需要多個電機同時驅動一個或多個工作部件進行協調控制的場合越來越多。傳統的控制系統多采用單一電機實現單軸控制,電機的輸出轉矩有一定的限制,當傳動系統需要較大的驅動功率時,必須特制功率與之相匹配的驅動電機和驅動器,使得系統的成本上升,而且過大的輸出功率的電機受到制造工藝和電機性能的影響,大功率的驅動器的研制也會受到半導體功率器件的限制。電機在實時跟隨同一目標轉速的同時。還需要保持兩電機問的轉速同步,否則便會導致后面的機械傳動精度下降。針對以上問題解決方法是采用多個電機對其進行控制,但是多電機之間同步的好壞直接影響到生產效率和產品質量,因此多電機同步控制的研究具有非常重要的現實意義。
本文建立了基于svpwm變頻調速的雙電機偏差耦合控制算法的仿真模型,并用Matlab7.1仿真軟件進行了仿真,對仿真結果做了分析和比較。
2.空間矢量脈寬調制
采用脈寬調制(PWM)技術是變頻器抑制諧波的主要措施。正弦波PWM(SPWM)技術首先被采用并一直沿用至今,經過不斷完善,效果顯著。然而它仍有不足之處,例如直流電壓利用率不高、低速時存在轉矩脈動、載波頻率過高帶來大的開關損耗等,由德國學者Van Der-Broeck H W提出的空間矢量脈寬調制從根本上解決了交流電動機轉矩的高性能控制問題.
它的基本思想是在三相交流電機上模擬直流電機轉矩控制的規律,在磁場定向坐標上將定子電流矢量分解成產生磁通的勵磁電流分量IM和產生轉矩的轉矩電流分量IT,并使兩分量互相垂直,彼此獨立,分別進行調節,實現轉矩控制.SVPWM把逆變器和交流電動機視為一體,著眼于如何使電機獲得圓形旋轉磁場,以減少電機轉矩脈動。具體地說,它以三相對稱正弦電壓供電時交流電機定子的理想磁鏈圓為基準,當電機通以三相對稱正弦電壓時,交流電機內產生圓形磁鏈,SVPWM以此圓形磁鏈為基準,通過逆變器功率器件的不同開關模式產生有效電壓矢量來逼近基準圓,即用多邊形來逼近圓形,并由它們比較的結果決定逆變器開關狀態,形成PWM波.
3.基于matlab的雙電機同步控制模型
3.1 雙電機同步控制策略
目前存在的同步控制技術包括并行控制,主從控制,交叉耦合控制,偏差耦合控制。并行控制和主從控制屬于非交叉耦合同步控制,當負載發生變化時,電機之間的同步精度不能夠得到保證。交叉耦合控制最主要的特點就是將兩臺電機的速度或者是位置信號進行比較,從而得到一個差值作為附加的反鐨信號。將這個附加的反饋信號作為跟蹤信號,系統能夠反映出任何一臺電機的負載變化,從而獲得良好的同步控制精度。但是這種控制策略不適合兩個以上電動機的同步控制情形。偏差耦合控制的主要思想是將某一臺電機的速度反饋同其它電機的速度反饋分別作差,然后將得到的偏差相加作為該電機的速度補償信號。這種偏差橢合控制策略能夠克服以上各種控制策略的缺點,實現很好的同步性能.
3.2 偏差耦合PID控制系統
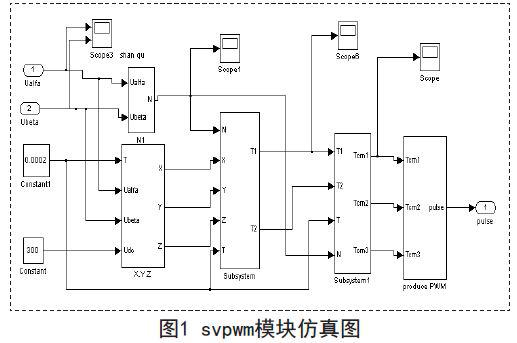
PlD控制有很強的生命力,它對于大多數過程都具有良好的控制效果和魯棒性,而且算法原理簡明,參數物理意義明確,理論分析體系完整且應用經驗豐富。因此針對系統中的抑制干擾特性這一方面的要求可以采用PID控制器。對單電機的控制采用雙閉環設計,通過svpwm進行調速,使系統具有良好的穩定性,svpwm調速模塊仿真圖如圖1所示。
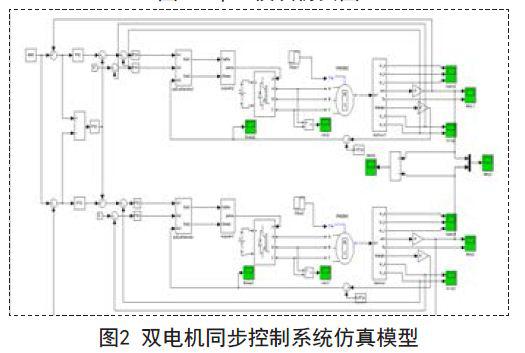
然后將兩臺電機反饋回來的轉速差作差,再通過PID調節作為當負載有變化時的轉速反饋額外補償。系統仿真模型如圖2所示。
4.系統仿真結果分析
系統中電機選用交流永磁同步電機(PMSM),通過simulink對本文中的模型進行仿真實驗。
在系統matlab7.1中,使用的電機模型的主要參數為:定子電阻Rs=0.0918Ω,交直軸定子電感Ld=Lq=0.000975H,轉子磁場磁通λ=0.1688Wb,轉動慣量J=0.003945kg·㎡,粘滯摩擦系數B=0.0004924N·m·s,極對數P=4.
將電機轉速設定為400r/min,讓電機進行零負載啟動。設定仿真時間為0.2s,為了驗證負載改變對系統產生的影響和雙電機的跟隨性能,在t=0.05s時,給PMSM2突加一個TM=20N·m的負載轉矩。仿真圖形如圖3所示。
由圖3可以看出電機在啟動后很快達到穩定狀態,轉子的轉速穩定到400r/min.當電機PMSM2突加負載轉矩后,PMSM2轉速經過短暫的下降后快速達到穩定,轉矩恒定在20N·m.
PMSM1轉速受到PMSM2負載改變的影響,出現微小的下降,然后快速恢復穩定,轉矩也出現微小的波動后迅速恢復穩定。說明基于svpwm調速的PID雙閉環控制系統有較強的魯棒性,雙電機間偏差耦合補償策略當某一電機負載改變時,另一個電機有良好的跟隨性能。
5.結束語
本系統在采用偏差耦合控制策略的基礎上加入PID控制補償器,使系統能夠很好的實現同步控制。每臺電機都采用專門的控制器和速度補償模塊,通過svpwm方式對電機進行調速,并采用電流環與速度環的雙閉環控制,即每臺電機及其控制器組成一個閉環系統,各子系統之間通過速度補償模塊進行耦合,形成完整的控制系統,增強了系統的抗干擾性。仿真結果表明,基于svpwm的PID雙閉環系統具有超調量小、響應迅速、魯棒性強等特點,而加入偏差耦合控制策略的雙電機控制系統具有良好的同步性。
-
耦合
+關注
關注
13文章
578瀏覽量
100793 -
逆變器
+關注
關注
283文章
4687瀏覽量
206288 -
電機
+關注
關注
142文章
8931瀏覽量
145090
發布評論請先 登錄
相關推薦
怎么使用Matlab進行電機控制算法仿真?
基于分類算法的雙三相感應電機SVPWM
電機控制算法
【下載】《現代永磁同步電機控制原理及MATLAB仿真》——同步電機MATLAB仿真與技術分析
基于交叉耦合控制算法的轉矩均衡控制策略






 工商網監
工商網監
評論