") 雙目主動(dòng)立體視覺(jué)監(jiān)測(cè)平臺(tái)靶標(biāo)編碼標(biāo)志點(diǎn)的設(shè)計(jì)與識(shí)別分析
雙目主動(dòng)立體視覺(jué)監(jiān)測(cè)平臺(tái)靶標(biāo)編碼標(biāo)志點(diǎn)的設(shè)計(jì)與識(shí)別分析
引言
雙目立體視覺(jué)測(cè)量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計(jì)算機(jī)視覺(jué)系統(tǒng)中,雙目立體視覺(jué)測(cè)量一般由雙攝像機(jī)從不同的角度同時(shí)獲取周?chē)拔锏膬煞鶊D像,或有單攝像機(jī)在不同時(shí)刻從不同角度獲取周?chē)拔锏膬煞鶖?shù)字圖像,并基于視差原理即可恢復(fù)出物體的三維幾何模型,重建周?chē)拔锏娜S形狀與位置。
在雙目立體視覺(jué)測(cè)量的許多應(yīng)用中,可以在待測(cè)物體表面分布一些具有明顯特征且易于識(shí)別的元素作為標(biāo)記點(diǎn),如圓、十字刻畫(huà)線等。若給標(biāo)記點(diǎn)加載唯一的身份信息,即對(duì)標(biāo)記點(diǎn)進(jìn)行編碼,對(duì)圖像中標(biāo)記點(diǎn)進(jìn)行唯一身份識(shí)別后,可以方便,可靠地實(shí)現(xiàn)多幅圖像間標(biāo)記點(diǎn)的對(duì)應(yīng)匹配。
基于上述原理,在實(shí)驗(yàn)室自主研發(fā)并聯(lián)機(jī)器人雙目主動(dòng)立體視覺(jué)監(jiān)測(cè)平臺(tái)的過(guò)程中,需要事先知道兩個(gè)攝像機(jī)的初始位置,由于光柵尺的造價(jià)昂貴及圓形光柵尺的生產(chǎn)加工難度大,我們?cè)O(shè)計(jì)了含有編碼標(biāo)志點(diǎn)的特殊靶標(biāo)。靶標(biāo)的關(guān)鍵部分為編碼標(biāo)志點(diǎn),本文主要對(duì)實(shí)驗(yàn)中所用編碼標(biāo)志點(diǎn)的設(shè)計(jì)與識(shí)別進(jìn)行研究。
1 靶標(biāo)的設(shè)計(jì)
本文設(shè)計(jì)了如圖1所示的靶標(biāo)(其中,中心處的編碼標(biāo)志點(diǎn)是不同的),利用其已知信息,完成對(duì)攝像機(jī)位置的標(biāo)定,實(shí)現(xiàn)了與圓形光柵尺相同的作用。在圓形導(dǎo)軌內(nèi)側(cè)均勻設(shè)置了6組(12塊)含有一個(gè)編碼標(biāo)志點(diǎn)和18個(gè)非編碼點(diǎn)的靶標(biāo)(如圖2所示),其中編碼標(biāo)志點(diǎn)位于靶標(biāo)的中心,其余非編碼點(diǎn)均為正方形,按一定尺寸關(guān)系均勻分布在編碼標(biāo)志點(diǎn)的兩側(cè)。
根據(jù)實(shí)際需要,本文采用了馬揚(yáng)飚等設(shè)計(jì)的編碼標(biāo)志點(diǎn)。編碼標(biāo)志點(diǎn)由編碼點(diǎn)和標(biāo)志點(diǎn)組成,其中標(biāo)志點(diǎn)提供位置信息,編碼信息被編譯儲(chǔ)存在編碼點(diǎn)的排布中。編碼標(biāo)志點(diǎn)應(yīng)該滿足以下要求:
·旋轉(zhuǎn)與改變比例的不變性;
·對(duì)可能存在誤差修正的目標(biāo)數(shù)量的強(qiáng)魯棒陛識(shí)別幾率;
·制定一個(gè)能精確測(cè)量與物體上一個(gè)控制點(diǎn)對(duì)應(yīng)的標(biāo)志點(diǎn)的中心的規(guī)則;
·在沒(méi)有統(tǒng)—對(duì)比度的圖像中,—個(gè)標(biāo)志點(diǎn)的強(qiáng)檢測(cè)幾率。
為了滿足這些要求,本文采用的8位編碼標(biāo)志點(diǎn)如圖3所示。其中標(biāo)志點(diǎn)和編碼點(diǎn)全部為圓形,標(biāo)志點(diǎn)位于中央,面積較大,編碼點(diǎn)規(guī)則排布在同一個(gè)圓周上,面積較小,整個(gè)編碼標(biāo)志點(diǎn)的位置信息由中央的標(biāo)志點(diǎn)圓心位置提供,各個(gè)編碼位上編碼點(diǎn)的有無(wú)決定了不同的編碼信息。編碼點(diǎn)由8個(gè)圓構(gòu)成,因此可能得到個(gè)編碼,然而由于一個(gè)編碼應(yīng)滿足旋轉(zhuǎn)和改變比例不變的需要,只有34個(gè)(編碼點(diǎn)個(gè)數(shù)為1的丟棄)可以作為編碼。
2 靶標(biāo)的識(shí)別
2.1 編碼標(biāo)志點(diǎn)的識(shí)別
2.1.1 圖像截取
使用雙目主動(dòng)立體視覺(jué)監(jiān)測(cè)平臺(tái)上的任一攝像機(jī)拍攝一幅靶標(biāo)圖像,其中可以含有幾個(gè)靶標(biāo),使用圖像截取函數(shù),從圖像中截取出只包含編碼標(biāo)志點(diǎn)的圖像。
2.1.2 圖像二值化
為了簡(jiǎn)化目標(biāo)識(shí)別過(guò)程,需要將截取出的彩色圖像轉(zhuǎn)化成灰度圖像,然后再將灰度圖像轉(zhuǎn)化為二值圖像,通過(guò)與閾值比較,圖像二值化按下式執(zhí)行:

其中:f(x,y)初始圖像,b(x,y)為二值圖像,t(x,y)為像素的閾值。由于圖像中對(duì)比度比較統(tǒng)一,應(yīng)用一個(gè)自適應(yīng)的閾值t(x,y)=t0,可以比較精確地將對(duì)象閾值初始化。
2.1.3 圓點(diǎn)質(zhì)心查詢
為了提取每個(gè)圓點(diǎn)的區(qū)域,使用"標(biāo)簽算法",執(zhí)行標(biāo)簽算法后,每個(gè)區(qū)域得到一個(gè)唯一的數(shù)字。對(duì)每一個(gè)連通區(qū)域使用"測(cè)量圖像中的對(duì)象屬性"方法,得到各個(gè)區(qū)域的面積和質(zhì)心。對(duì)中央標(biāo)志點(diǎn)圓來(lái)說(shuō),其質(zhì)心為(x0,y0),對(duì)于外圍的編碼點(diǎn)圓來(lái)說(shuō),其質(zhì)心為(xc,yc)。按照參數(shù)讀入的順序?qū)λ袇^(qū)域進(jìn)行編號(hào),通過(guò)比較,找到面積最大的圓,即中心標(biāo)志點(diǎn),記住其編號(hào)。
2.1.4 質(zhì)心角的求取
以任意一點(diǎn)為起始點(diǎn),按照逆時(shí)針的順序?qū)幋a點(diǎn)進(jìn)行排序,然后利用相鄰兩個(gè)編碼點(diǎn)的質(zhì)心信息與中心標(biāo)志點(diǎn)的質(zhì)心信息,求出各個(gè)相鄰編碼點(diǎn)間的質(zhì)心角θn(其中0°≤θn≤180°,2≤n≤8),并按逆時(shí)針順序存儲(chǔ)。
2.1.5 目標(biāo)編碼讀取
由于起始編碼點(diǎn)一定存在,故將其環(huán)形碼相應(yīng)位置"1"。對(duì)于8位編碼標(biāo)志點(diǎn),當(dāng)8個(gè)編碼點(diǎn)都存在時(shí),各個(gè)相鄰編碼點(diǎn)間的質(zhì)心角均為45°。利用這個(gè)信息,按照存儲(chǔ)順序,將求得的質(zhì)心角θn分別與45°的整數(shù)倍進(jìn)行比較,如果相等,表示在該角度位置存在一個(gè)編碼點(diǎn)。實(shí)際操作中,編碼點(diǎn)質(zhì)心角θn值是根據(jù)圖像處理中求得的編碼點(diǎn)質(zhì)心與中心標(biāo)志點(diǎn)質(zhì)心值計(jì)算所得,由于誤差的存在,質(zhì)心角θn值的實(shí)際值往往與理論取值(m×45°,1≤m≤4)有出入,所以在判斷某個(gè)角度位置是否有編碼點(diǎn)存在時(shí),可以先設(shè)定一個(gè)誤差允許范圍δ(0≤δ<22.5°),如果θn的實(shí)際值介于理論值±δ的范圍內(nèi),就說(shuō)明該角度位置上存在編碼點(diǎn),將環(huán)形碼相應(yīng)位置"1"。通過(guò)循環(huán),對(duì)編碼點(diǎn)質(zhì)心角θn的實(shí)際值逐一判斷,看其是否在上述的取值區(qū)間內(nèi),從而決定將環(huán)形碼相應(yīng)位置"0"或置"1"。
如前文所示,同一個(gè)編碼標(biāo)志點(diǎn)對(duì)應(yīng)的環(huán)形碼不唯一,將該環(huán)形碼在任意位置處截?cái)嗪螅賹⒑笠蛔有蛄兄糜谇耙蛔有蛄兄?此操作稱(chēng)為"循環(huán)截?cái)?),所得到的序列仍然表示該標(biāo)志點(diǎn),這里稱(chēng)這些序列為"同胚"序列。因此,預(yù)先將每個(gè)標(biāo)志點(diǎn)的編號(hào)和給定的逆時(shí)針順序下它的最小循環(huán)碼存儲(chǔ)起來(lái)。識(shí)別時(shí)只要得到一個(gè)最小環(huán)形碼的"同胚"特征序列,將該序列反復(fù)做循環(huán)截?cái)啵钡剿扔谧钚…h(huán)形碼為止,根據(jù)后者即可取出對(duì)應(yīng)的編號(hào)。
2.2 非編碼標(biāo)志點(diǎn)的識(shí)別
由于編碼標(biāo)志點(diǎn)的唯一性,通過(guò)對(duì)編碼標(biāo)志點(diǎn)的識(shí)別可以確定出靶標(biāo)的編號(hào),從而得到靶標(biāo)上各靶標(biāo)點(diǎn)的空間位置。靶標(biāo)上的其余非編碼點(diǎn)均為正方形,且和編碼標(biāo)志點(diǎn)有確定的位置關(guān)系,都可以通過(guò)角點(diǎn)檢測(cè)等步驟實(shí)現(xiàn)對(duì)其圖像的識(shí)別,從而完成對(duì)整個(gè)靶標(biāo)的識(shí)別。
3 數(shù)值實(shí)驗(yàn)
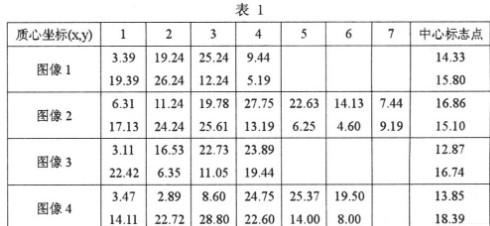
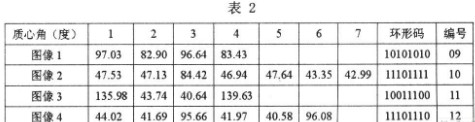
在本文的實(shí)驗(yàn)中,只用到其中的12個(gè)編碼標(biāo)志點(diǎn),我們按其在圓形導(dǎo)軌內(nèi)側(cè)順時(shí)針排列的順序進(jìn)行重新編號(hào)。為驗(yàn)證所提算法的效果,對(duì)拍攝的多幅圖像進(jìn)行了數(shù)值實(shí)驗(yàn),其中一幅如圖4(a)所示(由于頁(yè)面原因,對(duì)圖像作了裁剪和縮小,但保留了所有有效信息)。圖4(b)為從這幅圖像中按順時(shí)針順序截取出的四個(gè)編碼標(biāo)志點(diǎn)的圖像。表1給出了各幅編碼標(biāo)志點(diǎn)圖像中每個(gè)圓的質(zhì)心坐標(biāo)值。表2給出了實(shí)驗(yàn)中得到的各幅編碼標(biāo)志點(diǎn)圖像中相關(guān)質(zhì)心角的值、環(huán)形碼值及編碼標(biāo)志點(diǎn)的編號(hào)。實(shí)驗(yàn)表明,該算法對(duì)任意一幅圖像中編碼標(biāo)志點(diǎn)的識(shí)別率接近100%。
4 結(jié)論
在雙目立體視覺(jué)中,靶標(biāo)識(shí)別問(wèn)題對(duì)于目標(biāo)圖像的重構(gòu)起著關(guān)鍵性的作用。本文提出了基于質(zhì)心角的方法,對(duì)各幅編碼標(biāo)志點(diǎn)圖像進(jìn)行準(zhǔn)確的識(shí)別。通過(guò)大量的數(shù)值試驗(yàn),驗(yàn)證了此算法的有效性,實(shí)驗(yàn)結(jié)果表明,本文提出的基于質(zhì)心角的標(biāo)志點(diǎn)識(shí)別算法,對(duì)于采用本文所用的特定平臺(tái)等背景不太復(fù)雜的情況具有很高的識(shí)別性和實(shí)用性。通過(guò)編碼標(biāo)志點(diǎn)的準(zhǔn)確識(shí)別及相對(duì)確定的位置信息,即可通過(guò)對(duì)角點(diǎn)的檢測(cè),實(shí)現(xiàn)對(duì)整個(gè)靶標(biāo)的準(zhǔn)確識(shí)別。
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28197瀏覽量
206513 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1583瀏覽量
59955 -
監(jiān)測(cè)
+關(guān)注
關(guān)注
2文章
3527瀏覽量
44442
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
雙目立體視覺(jué)原理大揭秘(一)
雙目立體視覺(jué)原理大揭秘(二)
基于立體視覺(jué)的變形測(cè)量
雙目立體視覺(jué)的運(yùn)用
LABVIEW能做雙目立體視覺(jué)嗎
雙目立體視覺(jué)在嵌入式中有何應(yīng)用
雙目立體視覺(jué)中靶標(biāo)的設(shè)計(jì)與識(shí)別

基于HALCON的雙目立體視覺(jué)系統(tǒng)實(shí)現(xiàn)

雙目立體視覺(jué)傳感器精度分析與參數(shù)設(shè)計(jì)
使用雙目立體視覺(jué)實(shí)現(xiàn)CCD測(cè)距系統(tǒng)設(shè)計(jì)的資料說(shuō)明
雙目立體視覺(jué)的定義與理解
基于雙目立體視覺(jué)的測(cè)距原理、工作流程及優(yōu)點(diǎn)分析
雙目立體視覺(jué)原理 HALCON的雙目視覺(jué)系統(tǒng)研究
雙目立體視覺(jué)是什么?單目視覺(jué)與雙目立體視覺(jué)的區(qū)別?

關(guān)于雙目立體視覺(jué)的三大基本算法及發(fā)展現(xiàn)狀

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論