") 基于LPC11C24微控制器組成的CAN網(wǎng)絡(luò),實(shí)現(xiàn)對(duì)節(jié)點(diǎn)MCU的軟件更新
基于LPC11C24微控制器組成的CAN網(wǎng)絡(luò),實(shí)現(xiàn)對(duì)節(jié)點(diǎn)MCU的軟件更新
0引言
分散型控制系統(tǒng)中的現(xiàn)場(chǎng)終端一般由控制器和各檢測(cè)模塊構(gòu)成,它們之間通過(guò)一定的通信網(wǎng)絡(luò)建立數(shù)據(jù)的交換鏈路。這種系統(tǒng)具有高可靠、開(kāi)放性、靈活性、協(xié)調(diào)性、易維護(hù)等優(yōu)點(diǎn)。然而,該分散型系統(tǒng)也具有終端數(shù)量多、分布范圍廣的特點(diǎn)。一旦終端系統(tǒng)軟件存在缺陷或用戶提出新的功能和指標(biāo)要求時(shí),其升級(jí)、維護(hù)的工作量和成本都非常大。本文針對(duì)上述情況,設(shè)計(jì)了一種方便、靈活、快速及穩(wěn)定地對(duì)MCU節(jié)點(diǎn)進(jìn)行在線更新的機(jī)制。基于LPC11C24微控制器組成的CAN網(wǎng)絡(luò),采用IAP編程技術(shù)(In Application Programming),實(shí)現(xiàn)了對(duì)目標(biāo)節(jié)點(diǎn)MCU的軟件更新功能。
1 LPC11C24單片機(jī)和CAN總線
恩智浦半導(dǎo)體(NXP)推出業(yè)界首款內(nèi)嵌易用型片上CANopen驅(qū)動(dòng),集成高速CAN物理層收發(fā)器的微控制器LPC11C22和LPC11C24.作為一種獨(dú)特的系統(tǒng)級(jí)封裝解決方案,LPC11C22和LPC11C24集成了TJF1051CAN收發(fā)器,在低成本LQFP48封裝中實(shí)現(xiàn)了完整的CAN功能。
控制器局域網(wǎng)絡(luò)(Controller Area Network,CAN)是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國(guó)BOSCH公司開(kāi)發(fā)了的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO11898)。它是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。近年來(lái),其所具有的高可靠性和良好的錯(cuò)誤檢測(cè)能力受到重視,被廣泛應(yīng)用于汽車計(jì)算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)和振動(dòng)大的工業(yè)環(huán)境。
2在線更新機(jī)制架構(gòu)
系統(tǒng)架構(gòu)主要由2部分組成:由各個(gè)MCU組成的CAN網(wǎng)絡(luò);安裝在PC機(jī)上的USB-CAN通信卡,可以使PC機(jī)連上CAN網(wǎng)絡(luò),進(jìn)行數(shù)據(jù)通信,系統(tǒng)構(gòu)架如圖1所示。軟件也包括2部分:運(yùn)行在PC機(jī)的上位機(jī)軟件,提供用戶操作界面,將應(yīng)用程序代碼通過(guò)CAN總線發(fā)送給節(jié)點(diǎn);運(yùn)行在節(jié)點(diǎn)的啟動(dòng)程序,主要是響應(yīng)下載命令,接受代碼,把代碼寫(xiě)入FLASH,引導(dǎo)應(yīng)用程序。
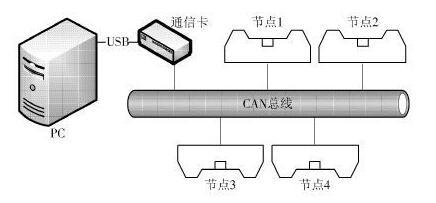
圖1 系統(tǒng)架構(gòu)
3在線更新機(jī)制的設(shè)計(jì)
3.1 IAP編程技術(shù)
IAP是應(yīng)用在FLASH程序存儲(chǔ)器的一種編程模式,即在某段程序的控制下完成對(duì)FLASH的讀/寫(xiě)操作,可以控制對(duì)某段、某頁(yè)、甚至某個(gè)字節(jié)的讀寫(xiě)操作。
LPC11C24單片機(jī)支持并提供9條IAP命令:
①準(zhǔn)備寫(xiě)操作的扇區(qū);
②將RAM內(nèi)容復(fù)制到FLASH;
③擦除扇區(qū);
④扇區(qū)查空;
⑤讀器件ID;
⑥讀Boot代碼版本;
⑦比較;
⑧重新調(diào)用ISP;
⑨讀UID.
3.2 FLASH空間分配
LPC11C24有32KB的FLASH空間,共分為8個(gè)扇區(qū),每個(gè)扇區(qū)的大小為4KB.為了使程序更新和應(yīng)用程序更加獨(dú)立,本文將FLASH空間分為3個(gè)區(qū),分別為啟動(dòng)程序區(qū),應(yīng)用程序區(qū),用戶數(shù)據(jù)區(qū)。
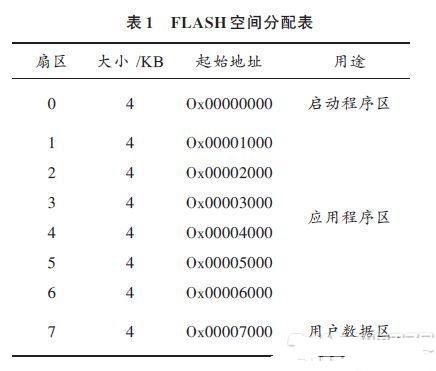
其中①啟動(dòng)程序是一段特定的駐留代碼,專門用于接收來(lái)自主機(jī)新的代碼,將其燒寫(xiě)到相應(yīng)的FLASH空間,完成后跳轉(zhuǎn)到應(yīng)用代碼區(qū)去執(zhí)行新的程序,代碼比較少,編譯生成的映像文件小于4KB,每次系統(tǒng)上電或重啟后先執(zhí)行啟動(dòng)程序。
②應(yīng)用程序是真正實(shí)現(xiàn)用戶功能的代碼。
③用戶數(shù)據(jù)區(qū)是用于存儲(chǔ)應(yīng)用程序的一些設(shè)置和數(shù)據(jù)。
3.3中斷向量表重映射與復(fù)制
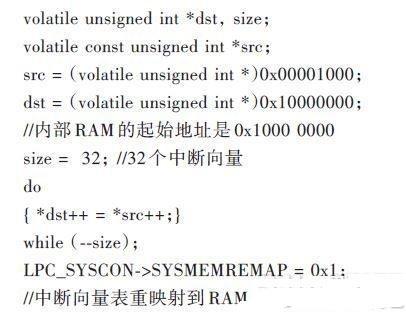
LPC11C24支持32個(gè)向量中斷,中斷向量表默認(rèn)位于FLASH的第一個(gè)4KB空間,地址從0x00000000~0x00000079.按照前面的設(shè)計(jì),啟動(dòng)程序占用第一個(gè)4KB的空間,當(dāng)跳轉(zhuǎn)到應(yīng)用程序時(shí),實(shí)際的中斷向量表是位于0x00001000~0x00001079的空間。但LPC11C24系列的單片機(jī)不支持自定義中斷向量表的地址,只支持將中斷向量表從FLASH重映射到RAM.
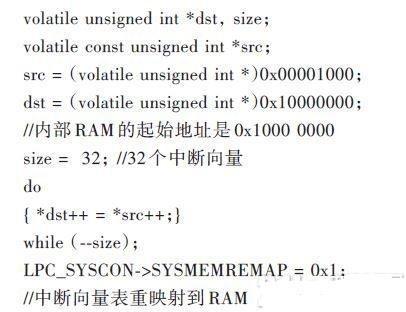
為了能讓?xiě)?yīng)用程序?qū)崿F(xiàn)正常的中斷處理,啟動(dòng)程序在跳轉(zhuǎn)到應(yīng)用程序之前還需要將應(yīng)用程序的中斷向量表復(fù)制并映射到RAM[10].
代碼實(shí)例如下:
3.4啟動(dòng)程序和應(yīng)用程序的設(shè)計(jì)與固化
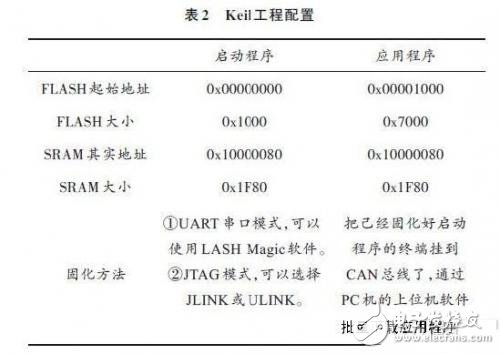
程序都在Keil for ARM集成環(huán)境下編寫(xiě)并編譯。
首先在Keil軟件下新建基于LPC11C24的工程,并配置FLASH和SRMA的起始地址和大小。具體如表2所示。
3.5啟動(dòng)程序與應(yīng)用程序之前的跳轉(zhuǎn)
在啟動(dòng)程序中定義應(yīng)用程序的地址,#defineAPP_CODE_ADDR (0x00001000),程序跳轉(zhuǎn)的代碼采用匯編語(yǔ)言編寫(xiě),代碼實(shí)例如下:
-
微控制器
+關(guān)注
關(guān)注
48文章
7492瀏覽量
151076 -
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44522瀏覽量
633182 -
控制器
+關(guān)注
關(guān)注
112文章
16212瀏覽量
177448 -
CAN總線
+關(guān)注
關(guān)注
145文章
1936瀏覽量
130636
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
客車網(wǎng)絡(luò)控制中CAN/CAN網(wǎng)橋設(shè)計(jì)
求助lpc11c24開(kāi)發(fā)板
利用XC2300系列微控制器實(shí)現(xiàn)CAN網(wǎng)絡(luò)安全
LPC2194CAN控制器和ARM微控制器相關(guān)資料分享
以8051微控制器和82527獨(dú)立CAN總線控制器為核心組成
恩智浦推出首款內(nèi)嵌易用型片上CANopen驅(qū)動(dòng)微控制器
NXP推出首款LPC11C22和LPC11C24整合式CAN收發(fā)器微控制器解決方案
基于LPC2294的CAN總線主節(jié)點(diǎn)設(shè)計(jì)

基于LPC2294的CAN總線智能節(jié)點(diǎn)設(shè)計(jì)

LPC11CXX CAN ISP升級(jí)方法
詳解LPC2000系列ARM微控制器的CAN驗(yàn)收濾波器應(yīng)用
在LPC2131微控制器外部實(shí)現(xiàn)CAN總線通信設(shè)計(jì)
微控制器(MCU)由什么組成
基于LPC2292微控制器和CAN控制器實(shí)現(xiàn)車輛行駛監(jiān)控系統(tǒng)的設(shè)計(jì)
CAN控制器和收發(fā)器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論