 紅外熱成像信號處理技術的最新科研進展
紅外熱成像信號處理技術的最新科研進展
1 問題的引出
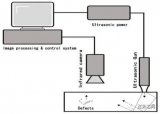
自然界中任何物體的溫度都高于絕對零度,會不斷向周圍空間發射紅外電磁能量。波長在0.75 ? 1000μm范圍內的紅外光位于電磁波譜中微波光和可見光之間。如圖1所示,這一光譜范圍可進一步細分為短波紅外(0.76 ? 1.5μm)、中波紅外(1.5 ? 5.6μm)和長波紅外(7.8 ? 13.5μm)。常用的可見光成像系統無法檢測紅外波長范圍內的能量信號,因此無法直接測量物體的溫度信息。如圖2所示,紅外熱像系統采集物體表面的紅外輻射能量,經光學系統會聚,把接收的紅外光波映射至二維的紅外焦平面探測器(focal plane arrays,簡稱FPA)上。焦平面探測器中的單個像元中的吸收層接收到紅外輻射能量后產生溫度變化,進而導致非晶硅熱敏電阻的阻值變化,最后,互補式金屬氧化物半導體(complementary metal-oxide-semiconductor,簡稱CMOS)電路將熱敏電阻阻值的變化轉變為差分電流并進行積分放大,得到紅外熱焦平面陣列中單個像元的輸出值。通過以上紅外熱成像技術,可以探測物體本身溫度導致的紅外熱輻射,產生與景物熱輻射分布相對應的紅外熱成像圖像。
圖1 紅外電磁波頻率分布
圖2 紅外信號采集系統
紅外焦平面探測器是紅外熱成像系統的核心部件,根據其成像原理和工作溫度分為制冷和非制冷兩類。制冷紅外焦平面探測器基于光子探測原理進行紅外輻射成像,具有極高的測溫靈敏性,能準確地測量物體的絕對溫度,且紅外探測距離遠。然而,制冷紅外探測器的工作性能受環境溫度變化影響嚴重。環境溫度升高會導致探測器材料固有的熱輻射能耗迅速增強,暗電流和噪聲的增大將嚴重降低探測器的性能,甚至無法正常工作成像。因此制冷探測器的正常工作溫度在200K溫度以下,通常需要用液氮制冷,導致其制作和維護成本昂貴,目前主要應用于高端軍事裝備。非制冷紅外焦平面探測器能夠在室溫狀態下工作,具有啟動快、功耗低、體積小、重量輕、壽命長及成本低等諸多優點。目前,現有的非制冷紅外焦平面探測器制作工藝可以精確捕捉微小的物體表面溫度變化,例如基于氧化釩(vana-dium oxide,簡稱VOx)熱敏材料的非制冷紅外焦平面探測器的單個成像元在25℃室溫環境下可以測量到±0.05℃的溫度變化。雖然非制冷紅外焦平面探測器在測溫靈敏度上與制冷器件尚有一定差距,但針對許多工業檢測應用已經足夠,且性價比高,因此具有更加廣闊的市場應用前景。
紅外熱成像技術可以將光譜中不可見的紅外輻射信號轉化成為可見的二維圖像,實現無光環境下的優秀成像,也可對物體表面溫度進行非接觸式的準確測量。紅外熱成像技術被廣泛應用于軍事和民用領域,如生物醫療、故障診斷、防火消防、智能駕駛及夜視安防等。然而紅外熱成像技術的發展也面臨一些主要瓶頸制約問題,包括:a.信號采集系統中焦平面陣列傳感器存在固定模式噪聲干擾,嚴重影響紅外圖像信號的成像質量;b.紅外探測器焦平面傳感器制作工業復雜、成品率低、價格昂貴,制約了紅外熱成像技術的工業廣泛應用;c.二維圖像采集過程中降維映射導致信息損失,影響了基于紅外溫度信息進行設備狀態監測系統的性能。針對以上3個主要問題,文中分別闡述在紅外信號固定模式噪聲建模和除噪、紅外信號特征重建、多源信息融合3個紅外信號處理研究領域的最新科研進展。
2 紅外熱成像技術基本原理
在熱輻射理論,黑體(black body)吸收所有入射放射能量,并根據普朗克定律產生如下輻射能量:
其中:λ為輻射的波長(μm);Mλ為絕對黑體的光譜輻射出射度(W ? cm2/μm);T為絕對溫度(K);c1和c2分別為第一和第二輻射常量。
在全部波長范圍內對普朗克公式積分,得到從黑體單位面積輻射至半球空間的總輻射功率,即總輻射出射度的表達式,通常稱為斯蒂芬?玻爾茲曼定律:

其中:M表示黑體的總輻射出射度(W ? | cm2);δ為斯蒂芬?玻爾茲曼常數(5.676 X 10-8 W ? m2? K-4)。
斯蒂芬?玻爾茲曼定律表明了黑體輻射功率和絕對溫度之間的線性耦合關系,它是基于物體紅外輻射信號采集實現物體溫度測量的主要理論依據。根據維恩位移定律,黑體輻射光譜的極大值對應的波長為:
其中:b=2897.8 μm ? K。
維恩位移定律表明,光譜輻射出射度的峰值波長與絕對溫度成反比,物體溫度愈高,對應輻射的峰值波長越短。根據式(3),在200 ? 3800K度范圍內物體目標的光譜出射度峰值波長均落在紅外波譜中。因此,可以利用紅外熱成像技術實現大溫度范圍內物體表面溫度的非接觸式測量。
3 紅外熱成像系統噪聲形態建模及補償方法
紅外焦平面探測器作為紅外熱成像系統的核心部件,需要有極高的溫度響應率和靈敏度,因此要求探測器像元微橋具有良好的熱絕緣性。同時為保證紅外熱成像的高頻信號輸出,需使像元的熱容盡量小以保證足夠小的熱時間常數。圖3為焦平面中單個探測元的結構示意圖。最新紅外像元制作工藝利用細長的微懸臂梁支撐熱敏材料以提高絕熱性能。制作輕、薄的橋面結構以減小熱質量,并在襯底制作反射層,與橋面之間形成諧振腔,提高紅外吸收效率。利用懸臂梁的兩端將像元微橋與襯底內的CMOS讀出電路連接。CMOS電路將熱敏電阻阻值變化轉變為差分電流并進行積分放大,采樣后得到紅外熱圖像中單個像元的輸出值。
紅外焦平面探測器的制作工藝復雜,難以保證每個單獨探測元的溫度響應特性一致。此外,非制冷紅外焦平面探測器單個探測元的溫度-輸出響應曲線會隨著相機工作溫度的變化發生遷移。如圖4所示,采集的紅外原始圖像(raw image)中包含明顯的固定模式噪聲(fixec-pattern noise,簡稱FPN),需要對其進行非均勾性矯正(non-uniformity correction),降低噪聲信號的干擾,獲得真實反映物體溫度場信息的紅外圖像。
圖3 紅外焦平面探測器像元結構示意圖
圖4 紅外圖像除噪
利用紅外輻射源對焦平面探測元陣列進行溫度響應曲線標定是最常用的非均勻性矯正方法之_。在《Linear theory of nonuniformity correctionin infrared staring sensors》中,通過采集標定源的紅外圖像,利用“兩點矯正法”或“相機擋板矯正法”計算單個成像元的非均勻性誤差的校正參數(如增益參數和偏移參數),并通過線性矯正模型應用于原始圖像中的對應成像元消除陣列空間非均勻性導致的信號誤差。然而,基于輻射標定的非均勻性矯正方法需要使用外置熱源,嚴重影響了紅外熱成像系統的尺寸、重量、功率及制造成本。此外,在進行定期校準標定的過程中,紅外信息的采集會被迫中斷數秒鐘,降低了紅外熱成像儀器的動態實時性,無法捕捉場景中快速變化的目標信息。
為了克服上述缺陷,在紅外信號研究領域中已經提出了多個基于紅外視頻場景分析技術的無基準紅外像元非均勻性矯正方法。Torre等提出了—種基于場景的紅外熱成像陣列非均勻性自適應校正方法。利用離散時間域內的高斯?馬爾可夫(Gauss-Marko)建模方法,準確獲得紅外熱成像陣列傳感器隨環境溫度變化導致固定模式噪聲中低頻和高頻漂移信號的不同形態規律。通過卡爾曼濾波器(Kalman filter)對陣列像元的輸出信號進行時間域濾波分析,計算出探測器像元非均勻性矯正所需的增益和偏差參數。Vera等提出了一種基于場景輻照度變化估值最小化的紅外陣列非均勻性矯正方法。利用交替最小化的策略對定義的各向同性總變差損失函數進行優化,以更快的收斂速度準確計算焦平面陣列中各個探測器的非均勻性矯正參數。然而,基于場景分析的非均勻性矯正方法通常需要緩存并處理一定數目的紅外圖像幀,才能完成非均勻性矯正參數的穩定計算,因此難以實現基于現場可編程門陣列(field programable gate array,簡稱FPGA)等信號處理硬件的實時計算。此外,基于場景分析的矯正方法需要其處理的圖像序列中包含足夠的場景信息變化,否則前幀圖像中的物體會作為偽影信息疊加至當前幀。如圖5所示,此類偽影信息的產生將嚴重影響紅外圖像信息的真實性。
圖5 基于場景分析的紅外圖像非均勻性矯正過程中引入的偽影信息
由于以上基于熱源標定和場景分析的非均勻性矯正方法的性能缺陷,紅外信號處理領域的研究焦點已逐漸轉移至基于單幀圖像處理的無基準紅外焦平面陣列矯正方法的研發。Tendero等提出了一種基于中位直方圖均衡處理技術的單幀紅外圖像非均勻性矯正方法。如圖6所示,通過對像元列中不同輸出信號的出現頻率進行概率統計,可以在保持紅外細節信息的同時有效消除紅外圖像中的條狀固定模式噪聲。如圖7所示,筆者設計并搭建固定模式噪聲信號模擬實驗平臺,分析不同輻射強度輸入在紅外焦平面陣列上導致固定模式噪聲的形態特征,發現紅外熱成像系統中的條狀固定模式噪聲與輻射輸入呈局部線性耦合關系。
圖6 進行條狀固定模式噪聲矯正前后的紅外圖
圖7 固定模式噪聲信號模擬實驗平合示意圖
在對干擾噪聲進行形態建模的基礎上,筆者提出基于一維引導濾波器的單幀紅外圖像非均勻性矯正方法,將高頻的紋理信息和干擾噪聲進行準確分離,并可以通過FPGA可編程信號處理器進行實時圖像矯正處理。最近,科研人員開始嘗試將深度學習領域中的科研成果應用于解決紅外領域中的除 噪問題。Kuang等在不同場景采集無噪聲紅外圖像,并通過條狀噪聲形態模型,模擬產生有固定模式噪聲的輸入圖像,通過搭建雙層卷積神經網絡,以監督學習的方式計算最優的除噪模型參數,并通過圖形處理器(graphics processing unit,簡稱GPU)并行編程實現視頻流的實時處理。然而,基于深度網絡學習的紅外圖像除噪研究尚處在起步階段。《Single infrared image stripe noise removal using deep convolutional networks》中提出的條狀除噪方法僅通過簡單的線性噪聲模型產生訓練樣本,因此訓練的深度網絡模型只能在模擬產生的含噪圖像上取得了較好的除噪效果,無法應用于包含復雜噪聲形態變化的真實紅外圖像上。如何實現訓練深度網絡模型所需大規模實驗數據的快速采集,是將深度學習技術應用于紅外信號除噪領域的關鍵科學問題之一。
4 紅外信號特征提取及重建方法
高像素紅外焦平面陣列傳感器的制作工藝復雜、成品率低,導致其制作成本昂貴,嚴重制約了紅外熱成像技術的廣泛工業應用。如何有效對低分辨率紅外圖片中的細節信息進行提取、分析和擬合,通過特征重建的方式掌握低像素紅外圖像與高像素紅外圖像的復雜映射關系,是目前紅外信號處理領域的熱點研究方向。這種對低分辨率圖像進行增強從而獲得其高分辨率版本的處理技術,在圖像處理領域中被稱作超分辨率。目前,大部分的超分辨率方案都是針對可見光頻譜中的彩色或者灰度圖像研發設計的,而適用于紅外圖像的超分辨率技術的研究尚處于探索階段。
超分辨率技術通常可以分為基于數據差插值、基于特征組合和基于樣本學習3大類。傳統的雙三次插值方法計算簡單,運行速度較快,但是得到的重建圖像比較模糊,并且會引入偽影。基于特征組合的超像素方法通過引入先驗知識(如梯度一致、非局部均值等)來約束超分辨率重構病態問題的解集空間,獲得到較好的重建效果。近些年來,基于大數據學習的超像素方法發展迅速,重建性能遠超基于數據差插值和基于特征組合的超像素方法。其基本原理是對大量匹配的低分辨率和高分辨率圖像的對應特征變化規律進行學習擬合,從而得到低分辨率至高分辨率圖像的映射函數。
稀疏編碼是一種具有代表性的機器學習方法。其基本假設是低分辨率和高分辨率圖像具有相似的稀疏系數。稀疏編碼法通過對圖像進行編碼分析,分別得到低分辨率和高分辨率圖像對應的特征字典。當輸入一幅低分辨率圖像時,計算其基于低分辨率字典中的稀疏表示系數。然后,使用相同的系數與高分辨率字典重建得到其對應的高分辨率圖像。類似的機器學習算法還包括領域嵌入法,該方法認為低分辨率和高分辨圖像在低維非線性流場上具有相似的幾何結構。
利用深度學習的方法,Dong等提出了基于卷積神經網絡的圖像超分辨算法(super-resolutionconvolutional neural network,簡稱SRCNN),從大規模樣本數據集里學習低分辨率至高分辨率圖像的最優映射函數。如圖8所示,雖然SRCNN的網絡結構相對簡單(僅包含3層卷積層),但是可以取得超過稀疏編碼方法和領域嵌入方法的圖像重建效果。此外,SRCNN精簡的網絡結構也滿足實時視頻流處理的要求。為了進一步提升深度網絡模型的運行速度,Shi等引入基于亞像素層機構的高效亞像素卷積神經網絡(efficientsut-pixel conv-olutional neural neetwork,簡稱ESPCN)網絡模型(如圖9所示)。這種網絡模型直接將低分辨率圖像作為訓練輸入,所有的卷積操作也都在低分辨率圖上進行,大大減少了每幅圖片樣本訓練時所需的卷積運算次數。
圖8 SRCNN網絡結構
圖9 ESPCN網絡結構
為了進一步提升深度網絡模型的重建效果,Kim等提出了深層超像素網絡模型(very deep super reolution,簡稱VDSR),如圖10所示。通過將SRCNN進行網絡深度擴展(從3層增加至20層),并且引入了跳躍連接,學習低分辨率與高分辨率圖像之間殘差信息的映射關系。通過對網絡層數擴展,其包含的參數數目大大增加,從而可以更加精確地擬合低分辨率和高分辨率圖片之間的復雜映射關系。然而,隨著網絡深度的增加,回傳誤差極大化或極小化的問題也變得愈發嚴重,導致模型訓練難度大大增加。《Accurate image super-resolution using very deep convolutional networks》通過使用較大的學習率加快了訓練收斂速度,同時采用了可調節的回傳梯度限制,緩解了回傳誤差梯度極大化或極小化問題。
圖10 VDSR網絡結構
由于復雜的網絡模型會導致龐大模型參數占用大量存儲空間的問題,Kim等提出了基于深度監督和參數共享技術的深層遞歸卷積網絡(deep-recursiveconvolutional network,簡稱DRCN)。多個模塊之間通過參數共享,大大減少模型的參數總和。并且每個模塊都通過跳躍連接將特征層輸出到重建層進行重建,每個重建后的圖像都進行互相監督,并回傳誤差梯度。DRCN網絡模型在大大減少模型參數的情況下,取得了類似于VDSR模型的特征重建效果。如圖11所示,Tai等通過疊加了多個殘差網絡模塊(ResNet),構建了一個包含52層網絡的深層遞歸殘差網絡(deep recursive residual net-work,簡稱DRRN)結構,取得了遠超VDSR方法的重建效果。為了減少模型參數數目,每個殘差模塊之間共享參數。需要指出,雖然以上的參數共享的技術可以有效節省網絡模型參數的存儲空間,但在運行模型時仍存在運算速度過慢的問題,因此僅適用于對運行時間要求不高的離線圖像增強應用中。
圖11 DRRN網絡結構
鑒于深度學習方法應用于可見光圖像超像素取得的優良性能,Choi等提出了4層紅外增強卷積神經網絡(thermal image enhancement network,簡稱TEN),將深度學習方法應用到紅外圖像的超像素處理。如圖12所示,與SRCNN網絡相似,TEN的網絡結構也比較簡單,方便對網絡參數進行訓練但難以達到較高的特征重建效果。此外,由于高分辨率的紅外圖像數據集較難獲得,且可見光圖像的紋理變化比紅外圖像更加豐富,Choi等認為可以利用可見光圖像進行訓練,并將訓練得到的網絡模 型直接應用于紅外圖像,同樣能取得較好的效果。然后,由于沒有分析紅外和可見光圖像特征的本質區別,TEN的增強效果十分有限。因此,研究基于深度學習方法的紅外圖像超像素技術,首先需要完成大規模紅外圖像特征庫采集,并針對紅外圖像的紋理信息和結構信息的不同特征,提出相應的學習方法分別掌握,在提高擬合精度的同時簡化網絡結構。此外,基于節省成本的要求,低分辨率紅外傳感器的像元數量通常極低(比如60像素 X 80像素),因此要求的超分辨方法的放大倍數也相對較大,這也給紅外超分辨率技術的發展提出了更高的要求。研發一種針對紅外圖像的高倍超分辨率算法也是廣大科研人員需要解決的問題之一。
圖12 TEN網絡結構
5 多源信息采集、融合及互補技術
使用二維紅外圖像表述三維物體的表面溫度分布具有嚴重局限性,包括只能獲取單個視角下物體的溫度信息、缺少溫度異常區域的三維信息、無法精確定位熱點位置等。因此,基于二維紅外圖像和三維深度信息融合互補技術的三維溫度場重建技術是紅外熱成像領域的熱點研究方向。現有的三維溫度場重建系統通常包含以下主要步驟:a.對紅外相機與深度傳感器進行外參標定和視頻同步,實現單視角采集條件下的多維信息融合;b.將深度傳感器采集的物體單點三維信息進行坐標系統一匹配,獲取物體的完整三維信息;c.將采集的紅外溫度信息根據物體三維幾何信息進行校正補償,并完成三維物體模型至二維紅外圖像的投影映射。
Skala等使用結構光深度相機和紅外相機搭建三維溫度場重建系統。如圖13所示,他們制作特殊標定板,使用立體標定法計算出深度相機與紅外相機的外參矩陣,利用相機外參矩陣直接將溫度信息映射到三維模型上。Vidas等采集同時具備形狀和溫度明顯變化的物體(如工作狀態下的顯示器)的紅外圖像和深度圖像,通過對顯著邊緣信息的提取和匹配,計算紅外相機與深度傳感器之間的相對位姿,并完成多源傳感器的同步標定。然而,由于標定板邊緣處的深度信息不準確和難以對低像素紅外圖像中的角點準確定位等干擾因素,導致以上外參矩陣的計算方法存在誤差。
圖13 特殊標定板對應的圖像
為了獲取得物體的三維信息,Ju等搭建一套基于雙目立體視覺的三維重建系統。該系統使用兩個高分辨率的彩色相機,可以在光照條件良好的環境里,精確獲得物體的三維信息。然而該方案的測量精度易受環境光照、場景陰影等因素的影響,且配置多個高分辨率彩色相機價格昂貴,雙目成像系統體積大,無法勝任快速、靈活的三維掃描任務。Tanno等提出使用兩個紅外相機實現物體三維溫度場重建。但由于紅外圖片低分辨率、低紋理信息、缺乏特征點的成像特性,該方案獲取的物體三維信息精度較差。Ham等提出基于動態、生成結構(structure from motion,簡稱SFM)技術的三維溫度場重建系統。然而,SFM算法只能生成稀疏點云且三維模型無尺度信息。激光雷達可獲得精確的三維點云并且受環境因素影響較小,Alba等使用激光雷達和紅外相機搭建三維溫度場重建系統。然而,基于激光雷達的三維信息采集方案的價格昂貴并且體積重量大等。近些年,基于主動式結構光投射原理的三維測量技術獲得了迅速發展。開發的深度傳感器(如Microsoft Kinect相機)具有價格低、重量輕、體積小和可夜間成像等諸多優勢。然而,基于結構光的深度相機普遍存在著噪聲干擾嚴重,測量精度不高等問題。Izadi等提出的基于GPU并行編程技術的Kinect Fusion算法,通過采集同一場景在臨近視角下的多幀深度信息,利用獲得的冗余三維信息,對傳感器噪聲進行有效抑制,提高三維信息測量精度,可以實現±2cm精度的實時三維場景重建。
隨著多視角三維重建技術的發展,Vidas等提出基于結構光深度相機的多視角全景三維溫度場重建系統。如圖14所示,該系統利用迭代最臨近點(iterative closest point,簡稱ICP)算法來追蹤相機位姿得到深度相機位姿,并進行多傳感器時間軸同步,估算出最近時刻紅外相機的位姿,最后將該視角下的三維信息與溫度信息融合到統_的全局坐標系中,得到大場景的三維溫度場重建結果。然而,該系統使用的ICP匹配算法僅僅通過尋找幾何鄰近點的簡單方式建立三維匹配點,未能考慮其他有效的場景信息。因此,ICP算法在相機位姿變化劇烈的情況下容易失效,并且在全景三維重建的過程中無法有效處理累積誤差,導致重建的三維模型精度難以得到保障。
圖14 基于Kinect深度相機的三維溫度場重建結果
如圖15所示,《Real-time mobile 3D Temperature mapping》將基于視頻的位姿估計(video-based pose estimation,簡稱VBPE)和ICP算法結合,提高追蹤相機位姿的穩定性。為了保證三維溫度場重建系統的實時性,該系統只能提取簡單的圖像特征點(如角點)對視頻圖像進行匹配,因此仍然無法處理前后兩幀之間相機位姿變化大和物體缺少紋理信息的ICP失效問題。
圖15 VBPE和ICP結合的三維溫度場重建系統框圖
在獲得準確匹配的二維溫度場和三維深度信息后,可結合結構變化對紅外輻射發射率的影響函數,對二維溫度信息進行三維視角正規化補償。為了獲得更高精度的三維溫度場,Muller等研究了一系列影響三維溫度場重建精度的因素,如深度相機分辨率、相機軌跡追蹤算法的精度以及魯棒性、物體離紅外相機的距離、紅外線在大氣中傳播的能量損失、紅外線發射角度以及反光的影響等。如何有效解決大位移條件下多維傳感器系統運動軌跡的穩定計算,以及如何建立結構變化與紅外輻射發射率之間的耦合函數,對二維溫度信息進行三維視角正規化補償,是三維溫度場重建技術未來發展的重要科研方向。
6 多頻譜紅外和可見光信息互補技術
目標物體在光照條件較好的白天環境中,可見光圖像能夠提供更加豐富的顏色紋理信息,而在光照條件較差的夜間環境中,紅外圖像具有比可見光圖像更加清晰的物體溫度信息。因此利用不同傳感器的互補性,獲得目標更全面、更豐富、更多細節的多源信息,能有效提升紅外熱成像系統目標檢測準確度。以智能駕駛應用中的行人檢測為例,Hwang等搭建車載多頻譜信號采集系統(如圖16所示),對城市中不同光照條件下的行人目標進行圖像采集和樣本標注。Hwang等通過無視差的可見光與紅外圖像采集系統得到了完全配準好的多光譜圖像數據集,采用集合頻道特征(aggregate channel features,簡稱ACF)特征提取算子和Adaboost分類器訓練得到的可見光與紅外目標檢測器性能在白天和夜晚測試集上均超過了單一光譜(可見光或紅外)目標檢測器性能。Choi等采用深度神經網絡(deep convolutional neuralnetworks,簡稱DC-NNs)進行目標特征的提取,使用支持向量回歸(su-port vector regression,簡稱SVR)取得了比傳統特征方法更好的效果。Liu等將深度神經網絡用于分類器的訓練中,進一步地提升了檢測器的性能。Kgnig等針對快速區域卷積神經網絡特征(fast regions wth CNN features,簡稱Fast-RCNN)對尺度較小目標分類性能較差的特點提出了采用Ada-boost對區域建議網絡(region proposal network,簡稱RPN)特征進行精分類,提升了目標檢測性能。目前對可見光與紅外行人目標檢測模型的優化主要還是在特征提取方法和分類器模型的選擇上進行調整。筆者將同步檢測分割區域建議網絡(simulta-neous detection segmentation & region proposal network,簡稱SDS-RPN)可見光行人目標檢測模型用于紅外與可見光行人目標檢測器的訓練與測試中,取得了目前最低的漏檢率,SDS-RPN同時作為特征提取器和分類器,在檢測速度上更有優勢。基于可見光與紅外多頻譜信息融合的行人目標檢測模型的性能對比如表1所示。目前研究的紅外與可見光目標檢測器均采用相同的算法對紅外與可見光圖像進行特征提取。針對紅外成像特性研究適用于紅外圖像的特征提取方法,是今后提升基于紅外與可見光信息融合目標檢測性能的一個重要方向。
圖16 可見光與紅外圖像采集系統
表1 基于可見光與紅外多頻譜行人目標檢測模型對比
7 結束語
紅外熱成像技術通過二維圖像的形式準確反映物體表面溫度分布情況,實現無光環境下的優秀成像,也可對物體表面溫度進行非接觸式的準確測量,廣泛應用于醫療診斷、故障診斷、能耗監控、智能駕駛等眾多工業領域。在對紅外熱成像技術進行研究的過程中,筆者發現紅外熱成像技術的發展也面臨一些主要瓶頸制約問題。由于紅外傳感器制作工藝的特殊性,存在嚴重的噪聲干擾,影響紅外圖像信號的成像質量。此外,紅外探測器焦平面傳感器價格昂貴,難以進行廣泛的工業應用推廣。最后,紅外圖像只包含物體的溫度信息,無法單獨為準確診斷提供依據,然而多源信息的采集融合工作目前還處于起步階段。
針對以上3個主要問題,筆者詳細介紹在紅外信號固定模式建模和除噪、圖像信息特征重建、多源信息融合三個紅外信號處理研究方向的最新科研進展。未來擬開展的科研方向包括:a.紅外成像信號的噪聲構成分析及形態建模方法;b.可見光和低像素紅外為信息源的紅外圖像重建理論;c.紅外圖像、可見光圖像、三維深度信息融合互補融合方法。研究成果將為新一代高成像精度、高分辨率、低制作成本的三維紅外成像儀器的研發具有重要的參考價值。
-
信號處理
+關注
關注
48文章
1002瀏覽量
103201 -
紅外熱成像
+關注
關注
2文章
342瀏覽量
15081
原文標題:紅外熱成像信號處理技術的研究進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦










 工商網監
工商網監
評論