 距離控制技術的原理及在EV3100電梯專用變頻器中的應用研究
距離控制技術的原理及在EV3100電梯專用變頻器中的應用研究
1、 引言
現代生活、生產和建筑的蓬勃發展,大大推進了電梯技術的發展,從而對電梯控制系統提出了越來越高的要求。
可編程序控制器(PLC)與變頻(VVVF)調速技術相結合的電梯控制系統,以其運行可靠、使用維修方便、抗干擾性強、調速性能優等特點被中小型電梯廠家廣泛采用。此類系統對電梯運行曲線的控制大多采用速度端子組合的多段速控制方式輸出固定的電梯運行曲線,電梯平層之前均有慢速爬行的過程。
國際電梯業巨頭多采用自行研發的電梯專用控制器,采用距離控制的直接停靠方式。而PLC因其自身編程指令及程序掃描時間的限制,很難編制距離控制的程序。艾默生CT推出的EV3100電梯專用變頻器,不僅具備通用變頻器的調速功能及普通的電梯專用功能。獨有的層高數據寄存器,通過參數設置即可實現距離控制。
2 、距離控制的基本原理
傳統的給定減速距離的控制方式的運行曲線如圖1所示,x軸為電梯運行過程的時間、y軸為運行速度。當電梯接收到系統的啟動信號后,系統加速到額定速度以后,勻速運行,當系統收到減速信號后開始減速,到達門區后開始爬行,至平層后停止。整個運行曲線表現為S型。
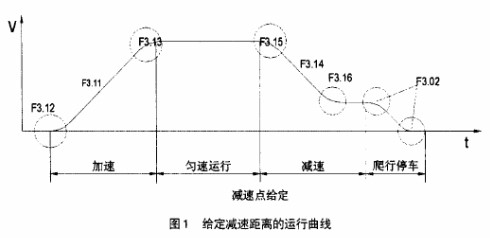
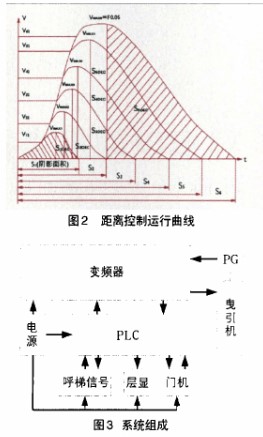
上述運行曲線是由控制系統預先設定好的,一般額定速度為1m/s的時候運行單條曲線,速度為1.5m/s的時候運行兩條曲線。而由控制系統根據停車距離自動生成電梯運行曲線的控制方式一般稱之為“距離控制”,其運行曲線如圖2所示。
3 、控制系統硬件設計
3.1 控制系統組成
由圖3可知,該系統主要由以下幾部分組成:PLC、變頻器、曳引機、門機等。PLC是控制系統的核心。PLC根據輸入的呼梯信號和目前電梯所處的位置自動確定電梯的運行方向及速度,變頻器根據PLC的速度指令控制曳引電動機的轉速,到達目的層后,自動平層、停車、開關門,在運行過程中輸出電梯的樓層位置和運行方向,同時完成對呼梯信號的登記、保存和消除等工作。對電梯運行中的一些特殊情況(如急停、超載、沖頂、蹲底等)自動進行處理和報警。
3.2 硬件選型
以一棟15層大樓為例,其電梯控制系統實際需要輸入60點,輸出62點。選用三菱公司的FX2N-128MR型PLC。這種機型有編程指令100多條,內置 8K步RAM寄存器,并配有相應的編程軟件GX Developer,不僅可以通過手持編程器對PLC編程,也可在個人PC機上進行編程。在電梯運行過程中,可通過程序內部輔助繼電器的狀態監控電梯運行狀態,現場調試十分方便。
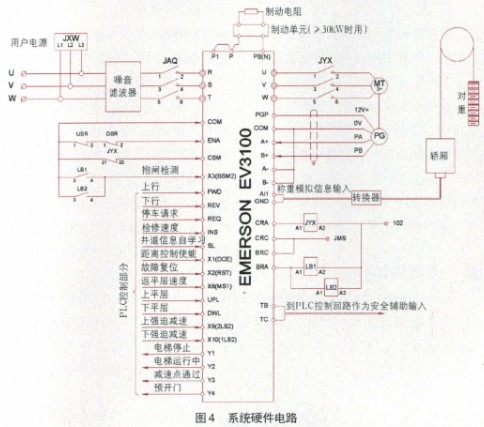
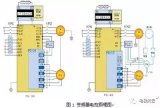
變頻器選用艾默生CT的EV3100電梯專用變頻器。除了矢量控制、轉差補償和負載轉矩自適應等功能,還具有抱閘控制及檢測、電梯超速檢測等電梯專用功能。為實現閉環矢量控制、提高系統的動態性能和實現零速抱閘控制,在曳引電動機軸端加裝旋轉編碼器。該編碼器信號不僅作為曳引電動機的速度反饋,利用EV3100變頻器的分頻功能,還可實現對電梯的數字位移控制。系統硬件電路如圖4所示。
4 、距離控制運行原理
(1)變頻器在接收到控制器發來的運行命令(FWD)和設定樓層指令(FLE, F1~F6)時,輸出接觸器吸合指令(CR);
(2)變頻器檢測到接觸器吸合(CSM)后,再經過延時,打開變頻器,輸出釋放抱閘的命令(BR),和變頻器運行中信號(Y2);
(3)經過抱閘打開延時時間T2后,抱閘完全打開,變頻器開始按S曲線加速運行;
(4)電梯運行過程中可以不斷響應其它設定樓層指令(FLE,F1~F6),變頻器會根據能否正常減速停車來選擇最優樓層停靠;
(5)到達曲線減速點后,變頻器開始減速停車。進入平層一定距離(F4.07平層距離調整)后,速度減為0,經延時后,變頻器輸出抱閘關閉命令(BR),同時輸出電梯停車信號(Y1),要求控制器切除運行命令(FWD);
(6)控制器接收到電梯停止信號后,經時間延時切除運行命令(FWD),變頻器封鎖PWM后輸出停機狀態信號(Y2);
(7)停機狀態(Y2)有效后,經時間延時,輸出電流為0,變頻器輸出釋放接觸器命令(CR),至此一次運行過程結束。
5、結束語
實踐證明,在EV3100電梯專用變頻器的基礎上開發的采用距離控制技術的控制系統已被某電梯公司批量采用,系統穩定、可靠運行,對中小規模的電梯制造廠開發通用性的電梯控制產品也有借鑒價值。
責任編輯:gt
-
控制器
+關注
關注
112文章
16214瀏覽量
177485 -
plc
+關注
關注
5008文章
13167瀏覽量
462201 -
變頻器
+關注
關注
251文章
6510瀏覽量
144299
發布評論請先 登錄
相關推薦
PWM與PAM在變頻器中的應用
基于PWM技術的變頻器性能提升策略

變頻器是怎么控制電機的





 工商網監
工商網監
評論