") 基于單片機(jī)實(shí)現(xiàn)總線控制智能數(shù)據(jù)采集模塊的軟硬件設(shè)計(jì)
基于單片機(jī)實(shí)現(xiàn)總線控制智能數(shù)據(jù)采集模塊的軟硬件設(shè)計(jì)
引言
基于集中管理、分散控制的分散控制系統(tǒng)(distributed control system)解決了集中式直接數(shù)字控制系統(tǒng)對控制器處理能力和可靠性要求過高的缺陷,但由于其具有一定的封閉性、各分散控制系統(tǒng)之間的不兼容性,集散控制系統(tǒng)難以實(shí)現(xiàn)網(wǎng)絡(luò)互連和信息共享。
現(xiàn)場總線的出現(xiàn)使得全數(shù)字化,全開放式,具有可互操作性,徹底分散的現(xiàn)場總線控制系統(tǒng)(fieldbus control system)得以實(shí)現(xiàn),現(xiàn)場總線控制系統(tǒng)已成為自動化領(lǐng)域中的一個(gè)熱點(diǎn),也將成為工業(yè)過程控制的一個(gè)重要發(fā)展方向。
控制器局域網(wǎng)CAN(controller areanet work)是德國Bosch公司在現(xiàn)代汽車電子技術(shù)領(lǐng)域中推出的一種多主控制器局域網(wǎng)絡(luò)技術(shù),能有效支持分布式和實(shí)時(shí)控制,最早主要應(yīng)用于汽車內(nèi)部電子監(jiān)測和控制器件數(shù)據(jù)通信。由于其高可靠性及高實(shí)時(shí)性而廣泛應(yīng)用于工業(yè)現(xiàn)場控制等領(lǐng)域。其突出的特點(diǎn)是采用最長8個(gè)數(shù)據(jù)字節(jié)的短幀結(jié)構(gòu),傳輸時(shí)間短,實(shí)時(shí)性高;另外CAN協(xié)議取消了傳統(tǒng)的地址編碼概念,取而代之的是基于數(shù)據(jù)塊標(biāo)識符的無損優(yōu)先級仲裁,給分布式控制系統(tǒng)實(shí)現(xiàn)模塊間的信息共享帶來了極大的方便。
基于CAN總線的主要特點(diǎn)及發(fā)展趨勢,我校電液實(shí)驗(yàn)室開放式電液伺服控制系統(tǒng)的改造中采用CAN總線作為現(xiàn)場總線標(biāo)準(zhǔn),構(gòu)建了一套基于CAN總線智能節(jié)點(diǎn)的現(xiàn)場總線控制系統(tǒng)。文中將詳細(xì)介紹智能數(shù)據(jù)采集模塊的軟硬件設(shè)計(jì),該模塊可以實(shí)現(xiàn)控制現(xiàn)場的數(shù)字、模擬信號采集,現(xiàn)場數(shù)據(jù)預(yù)處理,數(shù)據(jù)傳送以及與監(jiān)控計(jì)算機(jī)通訊等功能。
液壓伺服系統(tǒng)簡介
開放式電液伺服控制系統(tǒng)包括數(shù)臺電液伺服位置控制實(shí)驗(yàn)臺、電液比例轉(zhuǎn)速控制實(shí)驗(yàn)臺、電液比例力控制實(shí)驗(yàn)臺。各實(shí)驗(yàn)臺配置1套基于CAN總線的智能數(shù)據(jù)采集模塊和內(nèi)置控制算法的智能控制模塊,通過CAN總線將各分散的采集模塊和控制模塊組成一個(gè)控制網(wǎng)絡(luò),1臺PC機(jī)通過內(nèi)置的CAN適配卡接入局部網(wǎng)絡(luò),模擬工業(yè)現(xiàn)場的過程控制,PC機(jī)作為擔(dān)任過程控制監(jiān)控任務(wù)的控制站,可以實(shí)時(shí)顯示各實(shí)驗(yàn)臺工作狀況及向各實(shí)驗(yàn)臺發(fā)送啟停命令,同時(shí)還可以通過高速以太網(wǎng)將現(xiàn)場數(shù)據(jù)遠(yuǎn)程傳輸至工程師站等管理級計(jì)算機(jī),實(shí)現(xiàn)如圖1所示的分層現(xiàn)場總線控制系統(tǒng)。
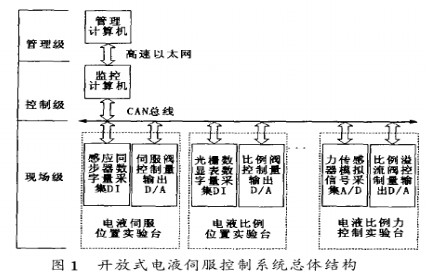
圖1 開放式電液伺服控制系統(tǒng)總體結(jié)構(gòu)
系統(tǒng)硬件設(shè)計(jì)
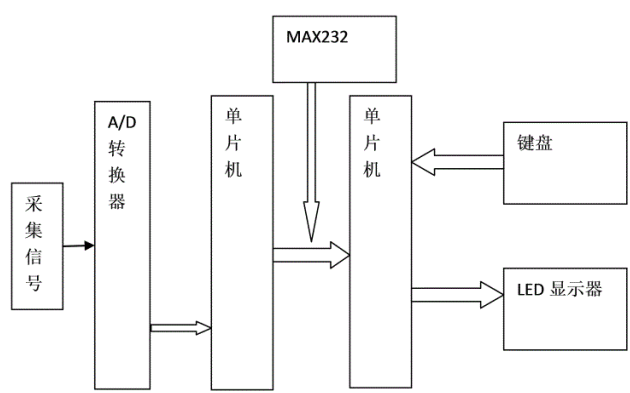
數(shù)據(jù)采集模塊作為一種智能化現(xiàn)場儀表,主要包括硬件系統(tǒng)和控制軟件2大部分。模塊硬件部分以80C196KC單片機(jī)作為采集模塊的核心,外圍電路主要包括CAN總線接口,程序存儲器,電源監(jiān)控及復(fù)位電路,GAL譯碼電路,DI、A/D轉(zhuǎn)換電路及模塊參數(shù)設(shè)置電路等。模塊結(jié)構(gòu)如圖2所示。
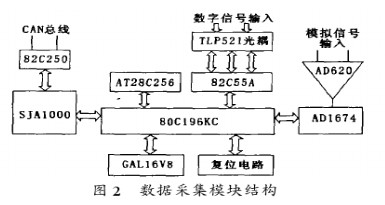
圖2數(shù)據(jù)采集模塊結(jié)構(gòu)
80C196KC單片機(jī)簡介
80C196KC是Intel公司推出的高性能16位單片機(jī)。和MCS51系列單片機(jī)相比,MCS196系列單片機(jī)具有更快的運(yùn)算速度和更豐富的片上外圍設(shè)備,提高了控制系統(tǒng)的實(shí)時(shí)性,主要體現(xiàn)在以下幾個(gè)方面:
a.可采用8/16位動態(tài)總線配置方式,增強(qiáng)系統(tǒng)的靈活性。
b.CPU中的算術(shù)邏輯單元不采用常規(guī)的累加器結(jié)構(gòu),改用寄存器-寄存器結(jié)構(gòu)。CPU的操作直接面向256字節(jié)的寄存器,消除了51單片機(jī)中存在的累加器的瓶頸問題,提高了操作速度和數(shù)據(jù)吞吐能力。
c.有一套效率更高、執(zhí)行速度更快的指令系統(tǒng)。可以對帶符號數(shù)和不帶符號數(shù)進(jìn)行操作,16×16位只需1.4μs(20MHz),32÷16位只需2.4μs(20MHz),此外還有3操作數(shù)指令,大大提高指令效率。
選擇80C196KC單片機(jī)作為數(shù)據(jù)采集模塊的核心器件,可以滿足應(yīng)用系統(tǒng)的要求,保證系統(tǒng)的可靠性和實(shí)時(shí)性。
CAN總線接口電路
CAN總線接口由PHILIPS公司的獨(dú)立總線控制器SJA1000和接口芯片82C250組成。SJA1000在軟件上和引腳上都是與它的前款PCA82C200獨(dú)立控制器兼容的,并增加了許多新功能:標(biāo)準(zhǔn)幀數(shù)據(jù)結(jié)構(gòu)和擴(kuò)展幀數(shù)據(jù)結(jié)構(gòu),并且這2種幀格式都具有單/雙接收過濾器;64字節(jié)的接收FIFO;可讀錯(cuò)誤計(jì)數(shù)器和可編程的出錯(cuò)警告界限以及僅聽模式和自測試模式等。硬件連接上比較簡單:SJA1000的數(shù)據(jù)地址總線是分時(shí)復(fù)用的,可以直接與80C196KC的P3口連接,對應(yīng)控制線相連即可。需注意的是,80C196KC是Intel公司的處理器,因此SJA1000工作在Intel方式,mode引腳應(yīng)接電源正端,另外單片機(jī)的外部中斷只有正跳變有效,而SJA1000的中斷信號是低電平有效,因此需反相后才能連接單片機(jī)中斷引腳。
82C250器件提供對總線的差動發(fā)送能力和對CAN控制器的差動接收能力,其RS引腳允許選擇3種不同的工作方式:高速、斜率控制和待機(jī)。在低速和總線長度較短時(shí),一般采用斜率控制方式,限制上升和下降斜率,降低射頻干擾,斜率可通過由RS引腳至地連接的電阻進(jìn)行控制。通信信號傳輸?shù)綄?dǎo)線的端點(diǎn)時(shí)會發(fā)生反射,反射信號會干擾正常信號的傳輸,因而總線兩端通常應(yīng)接有終端電阻,以消除反射信號,其阻值約等于傳輸電纜的特性阻抗,一般取120Ω。
數(shù)字信號采集電路
電液伺服實(shí)驗(yàn)臺需要采集的物理量之一是液壓缸的位移,實(shí)驗(yàn)室現(xiàn)有裝備的位移傳感器有2種:感應(yīng)同步器和旋轉(zhuǎn)光電編碼器。二者都配有帶BCD碼輸出的數(shù)顯測量儀表,直接采集數(shù)顯表的數(shù)字量可以保證采集模塊具有儀表的高精度,避免因采集傳感器前端脈沖而帶來的誤差,同時(shí)也使電路更加簡潔。
數(shù)字顯示儀表的有效BCD碼位數(shù)為5位(個(gè)、十、百位及2位小數(shù)位),另帶一位符號位,共有21位二進(jìn)制位。80C196KC片內(nèi)不帶程序存儲器,因而用P3和P4口作為地址數(shù)據(jù)總線,單片機(jī)剩余有效IO口資源較少,因此必須擴(kuò)展并口。并口擴(kuò)展可以采用專用擴(kuò)展芯片或通用74系列的邏輯芯片,為了簡化電路和編程,采用常見的可擴(kuò)展24路IO口的82C55A并口擴(kuò)展芯片。現(xiàn)場的數(shù)字顯示儀表的輸出是非標(biāo)準(zhǔn)的TTL電平,為了實(shí)現(xiàn)模塊與前端儀表兼容和隔離,對輸入的數(shù)字信號采用了TLP521光耦進(jìn)行電平轉(zhuǎn)換和信號隔離。
A/D轉(zhuǎn)換電路電路
本模塊中A/D轉(zhuǎn)換器選用AD1674,它與AD574兼容,12位分辨率,輸入電壓范圍0~±10V或0~±5V單雙極性可選,轉(zhuǎn)換時(shí)間為10μs,單通道最大采集速率50KHz,片內(nèi)帶基準(zhǔn)電壓、三態(tài)緩沖器,且具有采樣保持電路,完全滿足設(shè)計(jì)的需要。
模擬電壓信號來自BLR1型拉壓式稱重傳感器,傳感器壓力測量量程為0~5000kg,輸出電壓信號0~16mV。為適應(yīng)AD1674輸入電壓范圍,需對傳感器的微弱電壓信號放大,但同時(shí)并存許多噪聲源:傳感器內(nèi)阻、電纜電阻、放大器電路以及電路周圍的電磁干擾源。因此,電壓信號前端采用低通濾波器和差分放大器AD620等來抑制差模噪聲和共模噪聲,如圖3所示。
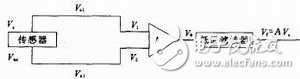
圖3 電壓信號前端電路
設(shè)Vs為傳感器的信號電壓,Vn1、Vn2為外部噪聲源在電纜線上的感應(yīng)噪聲信號,Vns為電路噪聲。因此,差分放大器輸出電壓Vo為:
Vo=A(V1-V2)=A(Vs+Vns+(Vn1+Vn2));如果噪聲源與信號源頻譜不重疊,則經(jīng)低通濾波電路后:Vf≈AVs。
GAL譯碼電路
本模塊電路中,單片機(jī)擴(kuò)展外圍器件較多,有程序存儲器AT28C256、CAN控制器SJA1000、并口擴(kuò)展82C55A和A/D轉(zhuǎn)換AD1674。196單片機(jī)在模塊中主要工作于8位總線寬度下,由于AD1674采用了12位并行輸出模式,因此還需動態(tài)改變總線寬度。為了簡化電路,以及適應(yīng)196單片機(jī)較高總線速度的要求,譯碼電路放棄了傳統(tǒng)的門電路組合的方法,采用了可多次編程的通用陣列邏輯器件(generic array logic)GAL16V8。這樣可以減少元器件數(shù)量、降低線路復(fù)雜程度,同時(shí)降低故障機(jī)率及提高硬件設(shè)計(jì)的靈活性。
GAL16V8引腳分配及邏輯表達(dá)式如下:

由上述邏輯表達(dá)式可以看出,外圍器件地址基地址由最高4位地址A12~A15決定,AT28C256、SJA1000、82C55A及AD1674對應(yīng)基地址分別為:2000H,A000H,B000H,C000H。當(dāng)選通AD1674時(shí),單片機(jī)總線寬度控制引腳BUSWIDTH將置為高,動態(tài)調(diào)整到16位總線寬度,其余時(shí)刻,BUSWIDTH為低,單片機(jī)保持8位總線寬度。INTCAN和INTADC分別是對SJA1000和AD1674中斷請求信號取反。GAL表達(dá)式文件用ABEL軟件編譯形成JED文件,使用通用編程器燒入芯片,且可反復(fù)多次燒寫,方便調(diào)試。
軟件編程
控制軟件的合理設(shè)計(jì)是模塊實(shí)時(shí)、有效地完成數(shù)據(jù)采集及通信任務(wù)的關(guān)鍵,主要包括系統(tǒng)初始化、CAN信息處理、數(shù)據(jù)采集及處理等功能模塊。系統(tǒng)開放一個(gè)定時(shí)中斷,定時(shí)時(shí)間對應(yīng)上位機(jī)發(fā)送來的采樣周期。CAN報(bào)文的接收主要有2種方式:中斷和查詢方式。為提高系統(tǒng)的實(shí)時(shí)性,同時(shí)也保證接收緩沖器不出現(xiàn)數(shù)據(jù)溢出現(xiàn)象,模塊中采用中斷接收方式。CAN報(bào)文發(fā)送采用查詢方式,即當(dāng)需要發(fā)送數(shù)據(jù)時(shí),將預(yù)先組織好的數(shù)據(jù)幀按字節(jié)寫入SJA1000的發(fā)送緩沖寄存器中。
SJA1000的初始化主要是在SJA1000的復(fù)位模式下設(shè)置相應(yīng)寄存器。在初始化CAN內(nèi)部寄存器時(shí)應(yīng)注意同一網(wǎng)絡(luò)中各模塊的通信速率的設(shè)置應(yīng)一致。下面給出SJA1000工作在BasicCAN模式下的簡單的初始化源程序:
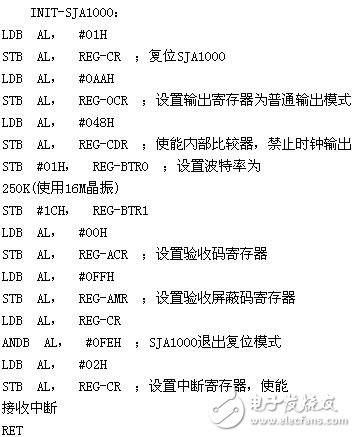
以上程序段可以正確初始化SJA1000,為了提高程序可靠性和容錯(cuò)性,實(shí)際應(yīng)用中應(yīng)該讀出SJA1000寄存器內(nèi)容并加以比較,從而判斷是否正確寫入。
結(jié)束語
基于以上所述的軟、硬件設(shè)計(jì)實(shí)現(xiàn)了CAN協(xié)議所包括數(shù)據(jù)鏈路層和物理層,由于CAN總線協(xié)議沒有定義應(yīng)用層,因此在實(shí)際的應(yīng)用中有必要定義高層通信協(xié)議,即相應(yīng)的命令、參數(shù)和數(shù)據(jù)的格式。國際上比較流行的基于CAN底層協(xié)議的高層協(xié)議有DeviceNet和CANopen,我們在簡單應(yīng)用中,采用了自定義的簡單通信協(xié)議,在此不作敘述。設(shè)計(jì)的智能數(shù)據(jù)采集模塊應(yīng)用于電液伺服控制系統(tǒng)以來,運(yùn)行情況良好,由于CAN總線的應(yīng)用,大大提高了分布式數(shù)據(jù)采集和控制系統(tǒng)的靈活性、可靠性和實(shí)時(shí)性,建立了一個(gè)有效的現(xiàn)場總線控制系統(tǒng)的實(shí)驗(yàn)教學(xué)平臺。同時(shí)該數(shù)據(jù)采集模塊也可以方便地移植到工業(yè)上的其它控制系統(tǒng)中,與其它基于CAN總線的智能控制模塊組成CAN現(xiàn)場總線控制系統(tǒng)。
責(zé)任編輯:gt
-
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632971 -
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8625瀏覽量
146861 -
總線
+關(guān)注
關(guān)注
10文章
2866瀏覽量
87984
發(fā)布評論請先 登錄
相關(guān)推薦
STM32單片機(jī)到底是如何實(shí)現(xiàn)軟硬件結(jié)合?

單片機(jī)到底是如何軟硬件結(jié)合的

單片機(jī)軟硬件聯(lián)合仿真解決方案
AVR單片機(jī)軟硬件設(shè)計(jì)教程入門篇
承接單片機(jī)軟硬件開發(fā)
基于PIC單片機(jī)USB接口的數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
基于PIC單片機(jī)USB接口的數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
基于stm32單片機(jī)實(shí)現(xiàn)一個(gè)數(shù)據(jù)采集系統(tǒng)
單片機(jī)測控系統(tǒng)的軟硬件平臺技術(shù)
MSP430單片機(jī)實(shí)現(xiàn)微波成像系統(tǒng)的掃描控制與數(shù)據(jù)采集
AVR單片機(jī)軟硬件學(xué)習(xí)教程

單片機(jī)系統(tǒng)軟硬件調(diào)試及維修技術(shù)
使用單片機(jī)進(jìn)行多路數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)的詳細(xì)資料說明
深度:單片機(jī)到底是如何軟硬件結(jié)合的?

深度:單片機(jī)到底是如何軟硬件結(jié)合的?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論