 將模糊控制與PLC相結合實現油田污水處理系統的設計
將模糊控制與PLC相結合實現油田污水處理系統的設計
1 、引 言
在工業過程控制中,PID控制適合于可建立數學模型的確定性控制系統。但在實際的工業過程控制系統中存在很多非線性或時變不確定的系統,使PID控制器的參數整定煩瑣且控制效果也不理想。近年來,隨著智能控制技術的發展,出現了許多新型的控制方法,模糊控制就是其中之一。模糊控制不需要掌握控制對象的精確數學模型,而是根據控制規則決定控制量的大小。這種控制方法對于存在滯后或隨機干擾的系統具有良好的控制效果。PLC具有很高的可靠性,抗干擾能力強,并可將模糊控制器方便地用軟件實現。因此,用PLC構成模糊控制器用于油田的污水處理是一種新的嘗試,不僅使控制系統更加可靠,而且取得了較好的控制效果。
2 、污水處理工藝簡介
目前我國許多油田處于二次采油期,即注水開采期,所采的油中含有大量的污水。油田污水處理的目的是將處理后的水回注地層以補充、平衡地層壓力,防止注入水和返回水腐蝕注水管和油管,避免注入水使注水管、油管和地層結垢。其處理方法是使用A、B、C三種藥劑,其中A劑為pH值調整劑,B劑為沉降劑,C劑為阻垢劑。其工藝流程方案如圖2—1所示。根據工藝要求,關鍵是在混合罐中對污水添加A劑提高污水的pH值(即控制pH2)以減少腐蝕。添加B劑可加速污水中絮狀物的沉淀。添加C劑可減緩污水在注水管和油管中的結垢。該系統屬非線性、大滯后系統,其對象的精確數學模型難以獲得,采用PID反饋控制效果不是很理想,且采油聯合站都位于偏僻的地方,環境惡劣。因此,該污水處理系統采用了基于PLC的模糊控制來提高系統的控制精度和可靠性,從而滿足工藝要求。
3 、模糊控制原理
控制系統采用“雙入單出”的模糊控制器。輸入量為pH值給定值與測量值的偏差e以及偏差變化率ec,輸出量為向加藥泵供電的變頻器的輸入控制電壓u。圖3—1為模糊控制系統的方框圖[2]。控制過程為控制器定時采樣pH值和pH值變化率與給定值比較,得pH值偏差e以及偏差變化率ec,并以此作為PLC控制器的輸入變量,經模糊控制器輸出控制變頻器輸出頻率n,從而改變加藥量使pH值保持穩定。
模糊控制器包括輸入量模糊化、模糊推理和解模糊3個部分。E和Ec分別為e和ec模糊化后的模糊量,U為模糊控制量,u為U解模糊化后的精確量。
3.1 輸入模糊化
在模糊控制器設計中,設E的詞集為[NB,NM,NS,N0,P0,PS,PM,PB][3],論域為[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6];Ec和U的詞集為[NB,NS,NM,0,PS,PM,PB],論域為[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]。令-1),pH0表示期望值。然后,將e、ec和u模糊化,根據pH值控制的經驗可得出變量E、Ec和U的模糊化量化表。表3—1為變量E的賦值表。
3.2 模糊決策和模糊控制規則
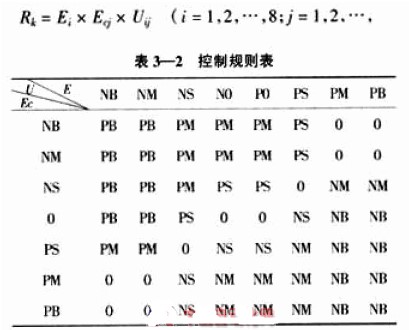
總結污水處理過程中pH值的控制經驗,得出控制規則,如表3—2所示。選取控制量變化的原則是:當誤差大或較大時,選擇控制量以消除誤差為主。而當誤差較小時,選擇控制量要注意防止超調,
以系統的穩定性為主。例如,當pH值低很多,且pH值有進一步快速降低的趨勢時,應加大藥劑的投放量。可用模糊語句實現這條規則(IFE=NB ANDEc=NB THEN U=PB)。當誤差為負大且誤差變化為正大或正中時,控制量不宜再增加,應取控制量的變化為0,以免出現超調。一共有56條規則。每條規則的關系Rk可表示為:

7)根據每條模糊語句決定的模糊關系Rk(k=1,2,…,56),可得整個系統控制規則總的模糊關系R。
3.3 輸出反模糊化
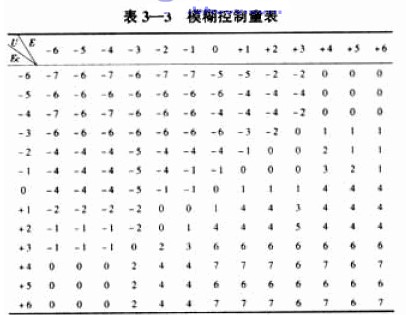
根據模糊規則表取定的每一條模糊條件語句都計算出相應的模糊控制量U,由模糊推理合成規則,可得如下關系:
以此得出模糊控制量,如表3—3所示。然后依據最大隸屬度法,可得出實際控制量u。再經D/A轉換為模擬電壓,去改變變頻器的輸出頻率n,通過 加藥泵控制加藥量調節pH值,從而完成控制任務。
4、 模糊控制算法的PLC實現
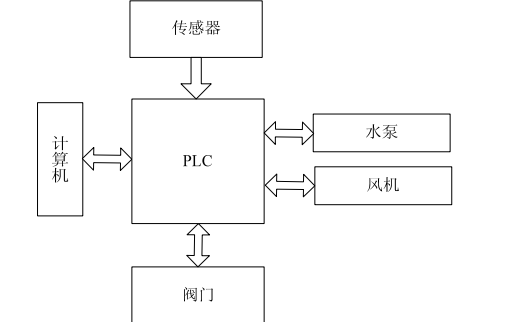
在控制系統中選用了OMRON公司的CQM1型PLC。首先將模糊化過程的量化因子置入PLC的保持繼電器中,然后利用A/D模塊將輸入量采集到PLC的DM區,經過限幅量化處理后,根據所對應的輸入模糊論域中的相應元素,查模糊控制量表求出模糊輸出量,再乘以輸出量化因子即可得實際輸出值,由D/A模塊輸出對pH值進行控制。
4.1 模糊控制算法流程
(1)將輸入偏差量化因子Ke、偏差變化率量化因子Kec和輸出量化因子Ku置入HR10~HR12中。
(2)采樣計算e和ec,并置入DM0000和DM0001中。
(3)判斷e和ec是否越限,如越限令其為上限或下限值。否則將輸入量分別量化為輸入變量模糊論域中對應的元素E和Ec并置入DM0002和DM0003中。
(4)查模糊控制量表,求得U。
(5)將U乘以量化因子Ku,得實際控制量u。
(6)輸出控制量u。
(7)結束。
4.2 查表梯形圖程序設計
在模糊控制算法中,模糊控制量表的查詢是程序設計的關鍵。為了簡化程序設計,將輸入模糊論域的元素[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]轉化為[0,1,2,3,4,5,6,7,8,9,10,11,12],將模糊控制量表中U的控制結果按由上到下,由左到右的順序依次置入DM0100~DM0268中。控制量的基址為100,其偏移地址為Ec×13+E,所以由E和Ec可得控制量的地址為100+Ec×13+E。梯形圖程序如圖4—1所示。其中DM0002和DM0003分別為E和Ec在模糊論域中所對應的元素,MOV*DM0031DM1000是間接尋址指令。它將DM0031的內容(即控制量地址100+Ec×13+E)作為被傳遞單元的地址,將這個地址指定單元的內容(即控制量U),傳遞給中間單元DM1000再通過解模糊運算得u,然后由模擬輸出通道傳送給D/A轉換器。
5 、結 論
將模糊控制與PLC相結合,利用PLC實現模糊控制,既保留了PLC控制系統可靠、靈活、適應能力強等特點,又提高了控制系統的智能化程度。結果表明,對于那些大滯后、非線性、數學模型難以建立且控制精度和快速性要求不很高的控制系統,基于PLC的模糊控制方法不失為一種較理想的方案。只要選擇適當的采樣周期和量化因子,可使系統獲得較好的性能指標,從而滿足控制性能要求。
-
控制器
+關注
關注
112文章
16200瀏覽量
177399 -
plc
+關注
關注
5008文章
13150瀏覽量
462061 -
變頻器
+關注
關注
251文章
6504瀏覽量
144248
發布評論請先 登錄
相關推薦
【小e開發板申請】農村污水處理系統信息確認采集
分散式小型污水處理系統的PLC無線遠程集中監控方案
城市和工業污水處理系統有什么優點?
基于PLC的污水處理模糊控制系統的設計方案
變頻調速在污水處理控制中的應用
SPR污水處理系統的智能控制

基于PLC的油田污水處理系統的設計


如何使用PLC進行污水處理控制系統的設計
匯川PLC污水處理系統如何實現工業組態和遠程上下載

基于PLC遠程監控維護的自動化污水處理系統
基于PLC的污水處理系統如何實現數據采集和遠程監控

Modbus轉Profinet網關在污水處理系統中連接PLC和變頻器Modbus通信配置案例






 工商網監
工商網監
評論