") 采用基于Flash的低成本8位微控制器實現(xiàn)優(yōu)化電子鎮(zhèn)流器的設(shè)計
采用基于Flash的低成本8位微控制器實現(xiàn)優(yōu)化電子鎮(zhèn)流器的設(shè)計
目前,設(shè)計工程師在設(shè)計熒光燈或HID電子鎮(zhèn)流器時面臨著許多新的挑戰(zhàn)。除了一般的成本、可靠性與壽命壓力之外,設(shè)計師還必須實現(xiàn)一些增強的終端用戶功能,例如遠程亮度控制,同時還要滿足日益嚴格的國內(nèi)與國際照明規(guī)范。
雖然傳統(tǒng)的離散模擬設(shè)計技術(shù)仍然能夠?qū)崿F(xiàn)很多新的功能需求,但是,采用新一代的基于Flash的低成本8位微控制器(MCU)對于實現(xiàn)滿足規(guī)范要求的低成本、高分辨率、數(shù)字電子鎮(zhèn)流控制的設(shè)計,具有多種系統(tǒng)優(yōu)勢。尤其是,這些MCU簡化了數(shù)字反相控制功能,并集成了PFC功能。
電子鎮(zhèn)流控制
圖1給出了大多數(shù)電子鎮(zhèn)流控制應(yīng)用中采用的基本模塊結(jié)構(gòu)。主要模塊包括EMI(電磁干擾)濾波器、全波整流器、有源PFC前端、數(shù)字控制部分和共振燈管輸出部分。
EMI濾波器用于阻止鎮(zhèn)流器產(chǎn)生的噪聲傳輸回電源線。全波整流器用于將交流電源轉(zhuǎn)換為直流電源電壓,這一電壓可以受控于其他模塊。一般的設(shè)計中都采用某種PFC電路控制正弦輸入電流,產(chǎn)生經(jīng)過調(diào)節(jié)的直流總線電壓。鎮(zhèn)流控制器部分實現(xiàn)傳統(tǒng)R-L-C型共振輸出電路的頻率調(diào)制控制功能(通常采用一個PWM信號),實現(xiàn)燈管的預(yù)熱、啟輝和鎮(zhèn)流功能。
R-L-C共振輸出電路能夠適應(yīng)多種不同類型的燈管。如果采用基于嵌入式MCU的電路來實現(xiàn)該設(shè)計的數(shù)字控制部分,那么它能夠?qū)崿F(xiàn)閉環(huán)亮度控制、燈管故障檢測、關(guān)閉與自動重啟等功能所需的電路與軟件。目前的嵌入式MCU還支持標準的通信接口,例如DALI(Digitally Addressable Lighting Interface,數(shù)字可編址照明接口),或者其他一些RS-232型或同步串行接口總線,例如I2C,或者用于遠程控制與監(jiān)測的串行外設(shè)接口。

注意,在圖1中沒有電流流過熒光燈管,當(dāng)燈管關(guān)閉時鎮(zhèn)流控制器所見的阻抗為無窮大。在開燈時,電極上的電壓必須達到足夠高,才能使高電離氣體在燈管的兩端之間形成電弧。這一最大電壓稱為擊穿電壓(VSTRIKE)。當(dāng)燈管開啟之后,該電壓將降低到一個較低的穩(wěn)態(tài)電壓(INOM)。
為了更好的理解這個鎮(zhèn)流控制器電路,我們有必要回顧一下對常規(guī)的低壓熒光燈進行供電所必要的電路功能。電子鎮(zhèn)流電路必須實現(xiàn)下列基本功能。首先,它們必須為燈管的兩極提供一個足夠高的擊穿電壓。然后,當(dāng)燈管開啟時,該電路必須維持一個恒定電流,同時進入穩(wěn)態(tài)工作模式。接下來,該電子控制器必須通過反相電路補償直流總線電源上的波動和故障條件。這樣才能確保燈管具有穩(wěn)定的輸出光源和使用壽命。最后,鎮(zhèn)流器電路必須符合相應(yīng)的國內(nèi)與國際技術(shù)規(guī)范。
新的數(shù)字燈管鎮(zhèn)流器設(shè)計方案融入了一些新增的功能,例如亮度控制功能、壽命終止監(jiān)測、啟動故障檢測或燈管移位指示。不同的燈管需要不同的設(shè)置,在數(shù)字設(shè)計方案中通過保存在MCU非易失性存儲器中的軟件設(shè)置參數(shù)很容易控制這些功能設(shè)置。這些MCU還能夠調(diào)整所需的燈管設(shè)置參數(shù),確保燈管在使用壽命期間具有最大的效率。例如,可能需要增大擊穿電壓,或者稍微改變開啟狀態(tài)下的穩(wěn)態(tài)電壓。
數(shù)字反相控制
半橋式功率變換器和R-L-C諧振回路控制了熒光燈或HID燈兩極間的電壓。對驅(qū)動反相MOSFET的PWM信號進行更精確的控制能夠?qū)崿F(xiàn)更出色的輸出電壓控制效果。提高PWM模塊上步進信號的分辨率能夠?qū)崿F(xiàn)更好的線性頻率控制,尤其是在40KHz和120KHz之間。這確保能夠提供啟動熒光燈或HID燈所需的電極電壓,有助于產(chǎn)生穩(wěn)定的穩(wěn)態(tài)電壓。
大多數(shù)面向這類應(yīng)用的8位MCU都具有10位硬件PWM模塊,在系統(tǒng)工作狀態(tài)下通過軟件很容易配置這種模塊。最大的問題是,這些PWM模塊通常都具有較寬的工作頻率范圍,這限制了前面所提到的40KHz~120KHz范圍內(nèi)頻率步進(frequency step)的精度或分辨率。
采用簡單的軟件控制高頻振蕩技術(shù),并結(jié)合10位硬件PWM外設(shè)模塊,可以實現(xiàn)精細的頻率步進。MCU能夠?qū)崿F(xiàn)這種動態(tài)的軟件高頻振蕩控制技術(shù),有效改善燈管鎮(zhèn)流器的亮度控制功能。8位MCU集成了各種硬件外設(shè)模塊,例如PWM外設(shè)模塊或者軟件可配置的模擬比較器,再結(jié)合先進的軟件控制技術(shù),非常適合于這類應(yīng)用。
PFC的實現(xiàn)
PFC電路的輸入作為交流電源的電阻性負載,并產(chǎn)生一個經(jīng)過調(diào)節(jié)的直流輸出電壓,該電壓通常饋送給另外一段降壓轉(zhuǎn)換電路。實現(xiàn)PFC的一種方法是采用線性電流控制。該系統(tǒng)工作在具有可變開關(guān)頻率(30KHz~100KHz)的連續(xù)導(dǎo)通模式下。PFC控制算法包括兩個控制環(huán)路:一個快速環(huán)路用于輸入電流控制,一個慢速環(huán)路用于直流輸出電壓控制。
輸出電壓控制器采用MCU處理器與ADC(analog-to-digital control,模-數(shù)控制器)相結(jié)合的數(shù)字方案來實現(xiàn)。在處理器的控制下,來自于ADC的數(shù)據(jù)用于調(diào)制PWM,PWM的輸出產(chǎn)生瞬間交流輸入電壓與所需的瞬間輸入電流二者的比值。
然后,所需的輸入電流以電壓的形式饋送到電流控制環(huán)路中的模擬比較器中。PIC16F8XX MCU上提供的多種數(shù)字與模擬外設(shè)模塊,包括比較器和PWM控制器,可用于實現(xiàn)線性CCM(continuous current mode,連續(xù)電流模式)控制技術(shù)。
MCU
在電子鎮(zhèn)流控制電路的設(shè)計中,有兩種功能可以采用低成本的8位嵌入式MCU來實現(xiàn):一種是PFC,另一種是電子鎮(zhèn)流功率變換器的精確驅(qū)動。這類MCU中大多集成了模擬電路,例如模擬比較器和多通道ADC。這種電路通常與數(shù)字外設(shè)模塊(例如數(shù)字PWM模塊)結(jié)合使用。所有這些電路都受控于固件,這種固件可用于控制傳統(tǒng)的模擬系統(tǒng)。
除了這些模擬模塊之外,有些嵌入式MCU還具有增強型通用同步-異步收發(fā)器,或者作為主模塊的硬件串行同步端口通信外設(shè)模塊。這些功能可以實現(xiàn)包括遠程控制在內(nèi)的多種通信接口,進一步提高鎮(zhèn)流器設(shè)計的模塊化和靈活性。
提高PWM的分辨率
通過一種簡單的軟件技術(shù)能夠使所有的PIC MCU PWM模塊都支持不同類型的應(yīng)用,包括多種照明應(yīng)用,其中占空比必須保持恒定,輸出頻率只能變化很小的增量。
例如,在熒光燈和HID電子鎮(zhèn)流器中,通過頻率的變化可以控制與燈管串聯(lián)在一起的電感(鎮(zhèn)流器)的阻抗。為了保持鎮(zhèn)流器電感盡可能得小(以降低成本和尺寸),必須采用相對較高的開關(guān)頻率——通常在40KHz到120KHz的范圍內(nèi)。
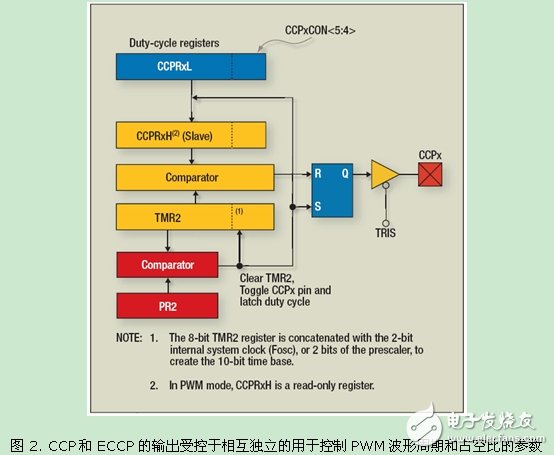
圖2給出了普通的微芯片PIC MCU的捕獲并比較模塊與增強型的捕獲并比較PWM模塊(分別表示為CCP和ECCP)。每當(dāng)定時器2(TMR2)中8位定時器的值等于周期寄存器的值(PR2)時,開始一個新的周期,PWM的輸出被置位(輸出高電平),定時器被復(fù)位。每當(dāng)TMR2等于CCP占空比寄存器(CCPRxH)的值時,PWM輸出清零(輸出低電平)。因此,TMR2模塊的結(jié)構(gòu)實現(xiàn)了PWM頻率控制所需的靈活性。
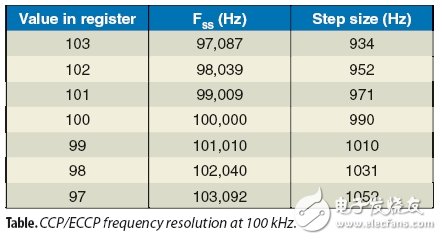
本文的表格給出了100KHz左右能夠產(chǎn)生的典型輸出頻率,以及PR2寄存器的值對實際PWM周期的影響。但是,如果在具有亮度控制功能的電子鎮(zhèn)流器中使用這種10位PWM模塊,那么這一分辨率不足以實現(xiàn)平滑的亮度控制效果,尤其是在人眼不太敏感的低亮度范圍內(nèi)。
要想為數(shù)字PWM外設(shè)模塊提供常用的60Hz左右的步進頻率參考值,時鐘頻率需要增大16倍,這將是一個成本高、技術(shù)難度大、有挑戰(zhàn)性的實現(xiàn)方案。采用與CCP/ECCP模塊相關(guān)的定時器中斷機制,只需要少量的固件代碼,就可以實現(xiàn)一種簡單的、低成本的方案。
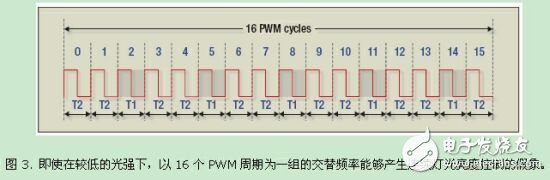
主要設(shè)計思想是,每次采用多組16個PWM周期,并在兩個離散的頻率值(兩個連續(xù)的PR2寄存器值)之間進行交替。例如,通過交替8個等于100的PR2周期和8個等于99的PR2周期,我們就可以獲得大小為100.5KHz的平均頻率。通過使用從1比16到15比16的其他各個比值,我們就產(chǎn)生了14個間隔增量約為64Hz的等間隔中間步進頻率,大小在100KHz到101.01KHz之間。在該照明應(yīng)用中,人眼本身能夠合成輸出光源,感覺上好像整個頻率分辨率增大了16倍。
能夠?qū)崿F(xiàn)這種機制最簡單的算法是采用一個計數(shù)器,使計數(shù)周期等于較低頻率下(T1)所需的分數(shù)值,后面緊接著較高頻率下(T2)與之互補的周期數(shù),如圖3所示。要想獲得間隔均勻的周期分布,可以采用一個4位累加器,在每一個周期內(nèi),將所選的分數(shù)值(1到15)加到該累加器上。如果產(chǎn)生了進位,那么隨后一個周期的持續(xù)時間將等于T1;否則,將等于基值T2。
通過結(jié)合使用基本的軟件定時器中斷技術(shù)與許多MCU提供的10位硬件PWM模塊,我們很容易生成復(fù)合的頻率信號,獲得與高分辨率可變頻數(shù)字信號相同的連續(xù)亮度控制效果。采用CCP模塊內(nèi)建的中斷機制,我們能夠以64Hz大小的步進值對100KHz的信號進行有效調(diào)整,同時只占用很少一部分可用的MCU指令周期。
數(shù)字電壓縮放
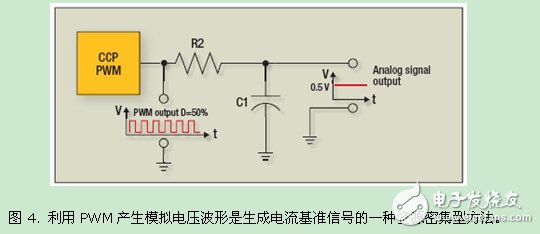
在實現(xiàn)基于線性電流控制的PFC時,有必要產(chǎn)生一個與交流市電電源的正弦輸入電壓同相的基準波形。一種方法是采用一個PWM輸出信號驅(qū)動一個低通R-C濾波器(如圖4所示),然后根據(jù)存儲在MCU存儲器內(nèi)的查找表改變PWM的輸出大小,產(chǎn)生所需的幅值和頻率。這是一種產(chǎn)生模擬基準信號的資源密集型方法。我們很難將這種方法動態(tài)地用作軟件反饋回路的一部分。
另外一種控制線性信號的方法是對模擬信號的幅值電平進行數(shù)字縮放。例如,PFC電路對輸入的交流電壓波形進行了縮放,產(chǎn)生了變頻器初始升壓階段的基準信號。這種縮放使得交流線路上的電流與電壓成正比,變頻器的交流輸入呈現(xiàn)出帶電阻的狀態(tài)。
對于這種電子鎮(zhèn)流控制的應(yīng)用,變頻器還必須對基于其輸出端上中間直流電壓的基準電壓值進行縮放,因此在實現(xiàn)PFC時需要采用一種方法控制對用于驅(qū)動其電流基準信號的交流輸入電壓的縮放比例。
實現(xiàn)模擬信號的數(shù)控縮放最簡單的方法就是采用數(shù)字電位器。但是對于工作在為電子鎮(zhèn)流控制器提供的交流輸入電壓大小范圍內(nèi)的低頻模擬系統(tǒng)而言,另外一種方法就是采用MCU的CCP功能。
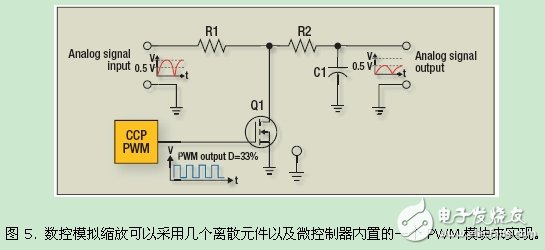
該方法采用一個低通R-C濾波器,用一個與MOSFET晶體管相連的抽頭對濾波器的電阻進行等分。采用一個數(shù)字PWM輸出信號驅(qū)動該MOSFET的柵極(如圖5所示)。低通濾波器的轉(zhuǎn)角頻率必須近似等于模擬電源信號最大頻率的100倍,從而確保濾波器的響應(yīng)特性不會對信號的幅值或相位產(chǎn)生副作用。
同樣,PWM頻率必須近似等于R-C濾波器轉(zhuǎn)角頻率的200倍,從而確保PWM頻率不會向濾波器傳輸明顯的能量。
圖5中的電路通過利用PWM信號調(diào)制MOSFET Q1,使輸入信號周期性地接地,從而對通過濾波器輸出端的原始模擬信號進行縮放。通過改變受控于運行在MCU上的固件的PWM占空比,可以調(diào)整縮放因子的大小。
由R2和C1組成的一階低通濾波器剝離了高頻的PWM信號,并將該信號平滑處理為其原始的正弦波形。這樣,只需要幾個無源元件——一個晶體管和一個普通的數(shù)字PWM外設(shè)模塊,就實現(xiàn)了對交流輸入電壓的簡單模擬縮放。
但是,必須注意的是這一技術(shù)也有一些局限性。首先,模擬信號的最大頻率諧波必須小于R-C濾波器的轉(zhuǎn)角頻率,以防止信號失真。其次,PWM頻率相對R-C濾波器的轉(zhuǎn)角頻率越高,被濾波器衰減的PWM頻率就越多。第三,由于濾波器的電阻分為R1和R2,因此PWM信號實際所見的轉(zhuǎn)角頻率等于模擬信號所見頻率的兩倍。
軟件電壓控制
該設(shè)計的一個遺漏之處是功率變換器的輸出和電子鎮(zhèn)流控制器的PFC模塊之間的反饋。這一反饋可按以下方法實現(xiàn):使用一個ADC通道測量直流總線的輸出電壓,然后將這一信息反饋回PWM控制器,由PWM控制器決定PFC模塊內(nèi)模擬輸入電壓的數(shù)字縮放所采用的比例(如圖6所示)。
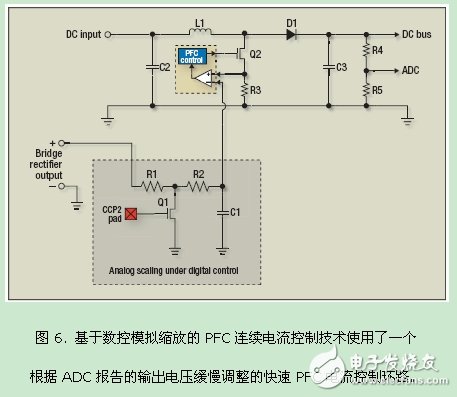
ADC的測量可以饋入一個高級的軟件比例積分求導(dǎo)環(huán)路濾波器,而不是僅僅利用輸出電壓和模擬輸入電壓縮放比例之間的直接線性關(guān)系。這有利于實現(xiàn)更好更平滑的閉環(huán)控制。其他一些參數(shù),諸如燈管的總消耗電流,也可以利用MCU上的ADC通道來采樣。
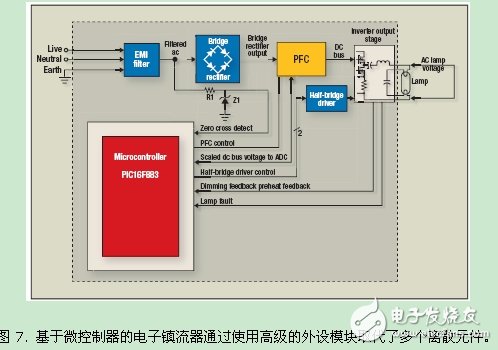
圖7給出了整個電子鎮(zhèn)流器設(shè)計中的一些重要信號,其中包括一個用于PFC控制的MCU、電流控制反饋環(huán)路和功率變換器的頻率控制電路(具有64Hz的有效分辨率)。
PIC16F88X采樣PFC模塊的輸出信號,然后決定對驅(qū)動數(shù)/模縮放電路的PWM輸出信號采用多大的頻率調(diào)節(jié)力度。該應(yīng)用還采用了ECCP模塊的中斷機制,該機制能夠通過簡單的軟件抖動方式,以很小的步進頻率調(diào)節(jié)半橋式功率變換器的驅(qū)動信號。
上述鎮(zhèn)流器設(shè)計方案通過使用MCU去掉了單獨的PFC控制器,并且只需要幾個低成本的無源外部元件即可實現(xiàn)。另外,通過簡單軟件與硬件技術(shù)的相結(jié)合,提高了10位集成PWM模塊上的可用分辨率。該設(shè)計方案還以實例的方式說明了如何利用8位MCU內(nèi)部集成的數(shù)字與模擬電路功能增強功能或者提高整個照明系統(tǒng)的性能。
-
微控制器
+關(guān)注
關(guān)注
48文章
7496瀏覽量
151087 -
濾波器
+關(guān)注
關(guān)注
160文章
7749瀏覽量
177737 -
adc
+關(guān)注
關(guān)注
98文章
6452瀏覽量
544149 -
電子鎮(zhèn)流器
+關(guān)注
關(guān)注
9文章
194瀏覽量
31898
發(fā)布評論請先 登錄
相關(guān)推薦
通用安徽市場的最小8位大時代S08微控制器可靠嗎
低成本低功耗8位微控制器可輕松融入高能效產(chǎn)品設(shè)計
STM32微控制器
低成本大的8 位嵌入式微控制器內(nèi)核設(shè)計
低成本嵌入式多媒體微控制器的設(shè)計與實現(xiàn)
瑞薩電子發(fā)布R8C/Lx系列8位微控制器
基于PicoBlaze的Nand Flash控制器的實現(xiàn)

采用優(yōu)化微控制器的先進功率設(shè)計有什么優(yōu)點?
低成本16位微控制器H8/3691(0)2G的性能特點及應(yīng)用
8位微控制器(MCU)的有哪些隱形成本?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論