 工廠行車遙控裝置的制作
工廠行車遙控裝置的制作
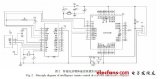
工廠車間常用的小型行車,裝在工字梁上。由電動機經減速機構帶動鋼絲繩,牽引吊鉤上下起吊重物。在電機行走的牽引下,可左右前后移動。
行車控制方法是由裝在行車上的電控箱中引出一根多芯電纜,再接一操作按鈕盒,通過六個按鈕或八個按鈕控制提升、下降、前后和左右行走或電源的開、關。
當行車移動時,操作者要手持按鈕盒,眼盯著重物,跟著行車走動,很不方便。筆者利用安裝有BA5104/5204組件的遙控裝置,可有效解決這一問題。本文是針對5t行車而制作的。
電路工作原理
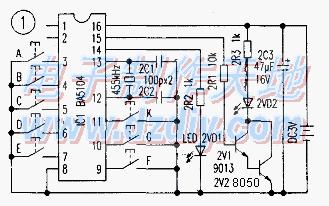
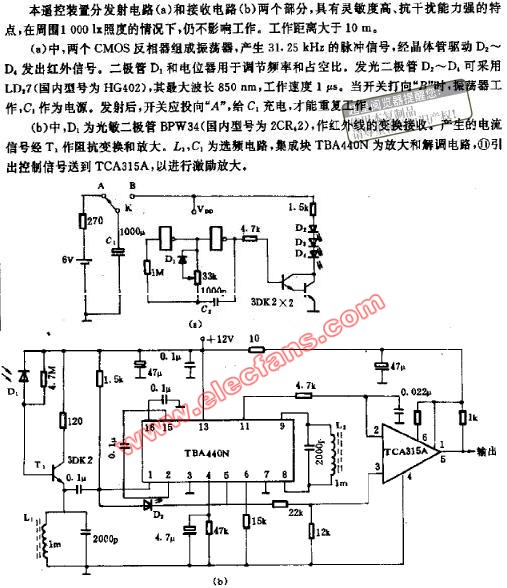
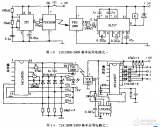
它由發射和接收兩部分電路組成,發射電路(如圖1)采用BA5104(ICl)專用編碼率型的LN70系列,‘VD2選用與之工作波長接近的PN303型光敏二極管。VDl與VD2應裝置在鉆有兩孔的黑塑料塊中。也可以用兩段小金屬管平行粘接在一起,然后在管中各放入一個光敏元件,如圖5示意。
電路本身的調試工作量很小,在裝好后,一般只要進行靈敏度調節。開始不要將紅外線發射和接收管裝置在一起。裝好電路后將VD1、VD2拉開2米左右的距離,將RP2調至最小。調節RPl使IClIC。ICl的①、②腳為客戶碼選擇端,此兩端要求和接收電路的BA5204(IC2)解碼IC的(11)、(12)腳對應懸空或接地。
ICl的(12)、(13)腳外接455kHz的陶瓷晶振,③一⑦腳、⑨~⑩腳接8個控制按鍵,按某~鍵,可使IC2相應腳電平發生變化。對應關系見附表。
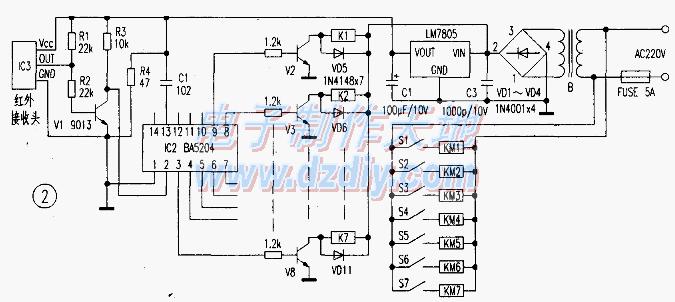
(14)腳為發射指示端。編碼信號從(15)腳輸出,經2V1和2V2組成的復合管放大后由2VD2紅外發射管變成光信號發射出去。遙控接收電路原理如圖2所示,IC2的工作電壓為5V。
(13)腳為內部振蕩器定時端,外接R4和C1網絡;③一⑩腳為控制輸出端。其③一⑧腳的6個端口為非保持端,在這里③、④腳為提升、下降信號端,(5)、⑥腳為前后行走信號端。⑦、⑧腳為左右行走信號端,⑨腳為開/停車保持端,設前后和左右行走電機電源接通端,分別控制相應的常開觸頭,實現電 源通斷控制。
IC3電路的紅外接收頭(三端),它接收放大和解調信號,把遙控器發出的紅外信號還原成解碼BA5204能識別的脈沖碼。BA5204的(3)~⑨腳輸出的信號分別經三極管V2~V8放大,驅動相應的繼電器,實現控制功能。
紅外線控制集成電路BA5.104,3V供電,2V1選用9013,2V2選用80500紅外線控制集成電路BA5204,5V供電。
Vl~V8選用9013,整流二極管VDl~VD4選用1N4001,VD5一VDl2選用lN4148。電源變壓器B選用XDT型交流220V信號燈變壓器。
繼電器K1~K7選用超小型中功率電磁繼電器JZC-ZZF型,吸合電壓12V。KMl~KM7需根據實際情況選定。
電動機的電器控制部分是原有的,不拆掉原有的按鈕盒和電纜,即可實現手動和遙控兩用。本電路在5t行車上進行應用,效果很好。若行車的起重量大,應增加中間繼電器。
-
遙控裝置
+關注
關注
0文章
7瀏覽量
7512
發布評論請先 登錄
相關推薦
基于電腦串口遙控裝置設計
無線比例電機遙控器的制作相關資料分享
怎么實現基于射頻識別技術的汽車防盜裝置的設計?
紅外線遙控裝置的多元應用
簡單實用的鼠標遙控裝置

電腦鼠標口的遙控裝置設計與制作(含電路圖)
哪一類電池可用于遙控裝置?
基于單片機的智能化多媒體電腦遙控裝置的設計
無線電遙控模塊、組件及其基本應用電路的解析





 工商網監
工商網監
評論