 基于DSP和交-直-交PWM驅動方式實現永磁同步電動機推進系統的設計
基于DSP和交-直-交PWM驅動方式實現永磁同步電動機推進系統的設計
針對永磁推進電機低轉速、大轉矩、輕噪聲的運行要求,其控制應具備良好的低速性能。根據最大轉矩/電流矢量控制原理,該文提出了一套以數字信號處理器(DSP)為橫心的全數字永磁同步電動機推進系統控制方案,給出了交-直-交脈寬調制(PWM)驅動方式的硬件結構,以及比例積分調節、空間矢量PWM(SVPWM)等軟件設計。仿真和實驗結果表明,系統動態響應快,轉矩脈動小,諧波含量少,低速性能良好,能移滿足艦船電力推進的需要。
永磁推進電機因其體積小、重量輕、效率高、轉矩密度大等優點,已經開始替代傳統直流推進電機,成為現代艦船電力推進系統中的常見動力裝置之一。國外對大功率交流推進電機的驅動控制研究多集中在異步電機方面,而國內目前還處于吸收引進階段。就驅動方式而言,文采用交-交循環變流器方式,具有低速性能好、起動轉矩大的優點,但控制復雜,功率因數低,高次諧波消除較為困難;文采用交-直-交PWM方式,其主電路簡單,功率因數接近l,能夠有效抑制和削弱諧波。就控制方法而言,文對比了矢量控制和直接轉矩控制,指出前者著眼于磁鏈與轉矩的解耦,電流、轉矩控制性能良好,調速范圍寬,后者動態響應快,但低速時轉矩脈動大,缺乏對電機電流的有效控制。
本文根據矢量控制理論和SVPWM原理,采用交-直-交PWM驅動方式,以TMS320LF2407ADSP為核心,給出了永磁同步電機推進系統的硬件結構和軟件流程。在此基礎上,對該套方案進行了Matlab/Simulink仿真和低速運行實驗。
1 永磁同步電動機的矢量控制策略
矢量控制理論是由F.Blaschke于1971年提出的,其基本原理是:在轉子磁鏈dqO旋轉坐標系中,將定子電流分解為相互正交的兩個分量id和iq,其中id與磁鏈同方向,代表定子電流勵磁分量,iq與磁鏈方向正交,代表定子電流轉矩分量,用這兩個電流分量所產生的電樞反應磁場來等效代替原來定子三相繞組電流ia、ib、ic所產生的電樞反應磁場,即進行Park變換:
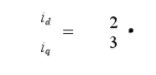
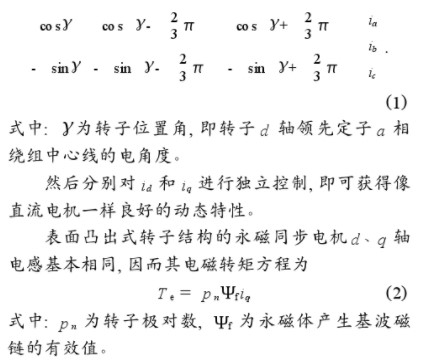
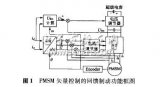
為使定子單位電流產生最大轉矩,提高電機的工作效率,本文選用最大轉矩/電流矢量控制,由式(2)可知,對于表面凸出式轉子結構的永磁同步電機,可令id=0,通過調節iq來實現轉矩的控制。如圖1所示,整個伺服系統由3個控制環構成。
1)位置環:采集電機旋轉編碼器輸出的脈沖信號,鑒相、倍頻后進行計算,提供坐標變換所需的轉子位置信息;
2)速度環:比較實際轉速n與設定轉速nref,所得差值經PI調節后,作為q軸電流參考值iqr,再經電流環調節后,反過來控制電機轉速;
3)電流環:比較電流實際值id、iq與參考值idr、iqr,經PI調節后產生d、g軸電壓參考值udr、uqr,將其轉換至靜止坐標系中得uαr、uβr,按SVPWM方式生成逆變器觸發信號,驅動電機。
2 系統硬件結構
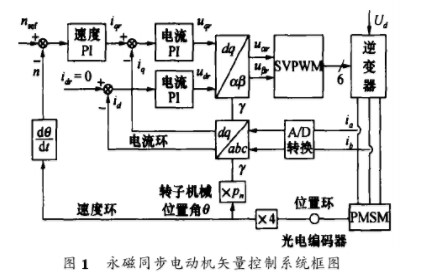
永磁同步電動機推進系統的硬件結構如圖2所示,它主要提供以下3大功能:電動機控制策略的實現、控制量的檢測采樣以及功率驅動。
2.1 TMS320LF2407A DSP
整個系統控制策略的實現由核心硬件TMS320LF2407A DSP完成,它是TI公司專為電機控制而設計的定點芯片,具有低功耗和高速度的特點,其單指令周期最短可達25 ns。片內兩個事件管理器(EVA和EVB)各有2個通用定時器,6個帶可編程死區功能的PWM輸出通道,1個外部硬件中斷引腳,3個捕獲單元(CAP)和1個正交編碼單元(QEP)。這些功能與串行外設接口(SPI)等模塊一起,極大地方便了電機控制過程中的數據處理、策略執行和決策輸出等。
2.2 控制量檢測部分
電機機械量的采集由增量式光電編碼器來完成,其輸出包括兩組脈沖信號:A、B、Z和U、V、W,它們與DSP的連接如圖2所示。其中A、B信號正交,頻率為電機機械轉速頻率的2 500倍,正交編碼單元將它們四倍頻后送入相應的計數器進行計數,計數方向由A、B信號的相位先后決定。Z信號隨轉子每轉一周輸出一個脈沖,用以檢測電機轉速。U、V、W信號與電機三相反電勢同頻率、同相位,根據它們的不同狀態,可將360電角度平面分成6個部分,用以確定電機的初始轉子位置角。
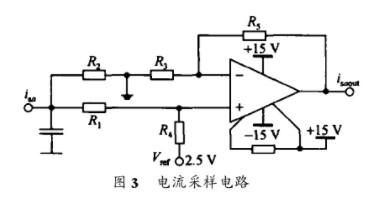
電機電流狀態量的采集由霍爾電流傳感器完成,其采樣電路如圖3所示,輸入輸出關系為
為了保證電流較小時的采樣精度,改善電機低速、輕載下的運行情況,本系統采用12 b雙A/D轉換器ADS7862來代替DSP內部10 b的模/數轉換模塊,通過DSP的外部存儲器擴展接口,將式(3)的模擬電流量轉換為數字量結果,輸入DSP。
2.3 功率驅動部分
永磁同步電機的功率驅動為交-直-交PWM方式,其中整流部分采用單相橋式不控整流,逆變部分采用智能功率模塊(Intelligent Power Module,IPM)PS21869,它內部集成了6個絕緣柵雙極型晶體管(Insulated Gate Bipolar Transistor,IGBT)及其驅動、保護電路,由DSP的PWMl~6引腳提供觸發信號,能夠在過流或欠壓故障發生時,關閉IGBT驅動電路,使模塊停止工作,同時在相應故障引腳輸出故障信號至DSP的PDPINTA引腳,通過硬件中斷,封鎖PWM脈沖輸出。
3 系統軟件設計
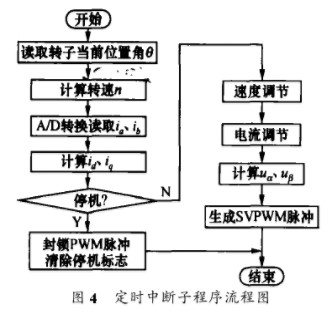
永磁電機推進系統的軟件主要由3部分組成:初始化程序、主程序和中斷服務子程序。系統復位時,首先執行初始化程序,檢測、設定DSP內部各模塊的工作模式和初始狀態。主程序負責收集電機電流、轉速、轉子位置等一系列實時運行信息,在滿足條件時設置系統標志位,執行相應中斷服務子程序。其中,外部保護中斷子程序由PDPINTA引腳觸發,用于在故障發生時切斷DSP的PWM及定時器輸出;而定時中斷子程序則是實現電機矢量控制策略的核心程序,
主要完成PI調節和SVPWM波形發生這兩大功能,其流程圖如圖4所示。
3.1 數字PI調節器
模擬PI調節器的控制規律為
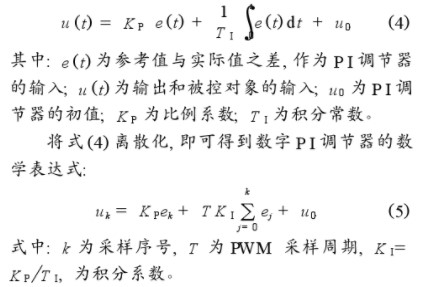
由于電機轉軸和負載軸轉動慣量的存在,速度PI調節器的時間常數較大,調速時系統響應較慢。而電流PI調節器則因為電時間常數較小,在電機起動和大范圍加減速時能夠快速進行電流調節和限幅,增強了系統抗電源和負載擾動的能力。
3.2 SVPWM波形發生
SVPWM是一種從磁通角度出發的PWM方式,其基本原理及扇區劃分見文。利用EVA的全比較單元,可直接在PWMl~6引腳上輸出五段式SVPWM波形,它在每個PWM周期中,能夠保證一相的開關狀態不變,有利于開關損耗的減小。其主要步驟如下:
1)將比較控制寄存器(COMCONA)第12位置l,使SVPWM發生功能有效;
2)設置比較方式控制寄存器(ACTRA),令SVPWM輸出矢量正向旋轉,使PWMl、3、5引腳高有效,PWM2、4、6引腳低有效;
3)設置定時器TI計數方式為“連續增/減”,相應周期寄存器TIPR的初始值為PWM采樣周期的一半,即Tc/2;
4)計算輸出空間電壓矢量Uout在兩相靜止坐標系中的分量uα、iβ;
5)確定組成Uout所在扇區的兩個非零空間矢量Ur、Ux+60,按其值裝配ACTRA;
6)根據表1計算Ux、Ux+60的作用時間t1、t2,將t1裝入比較寄存器CMPRl,t1+t2裝入CMPR2,啟動定時器操作。
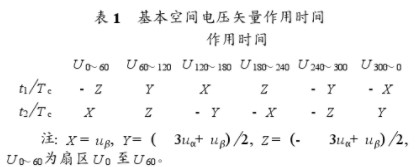
當TI值與CMPRl或CMPR2值發生匹配時,PWM輸出就會產生跳變。通過及時更新每個采樣周期中CMPRl、CMPR2的值,就可以形成一系列不等寬的脈沖,使輸出電壓矢量的磁鏈軌跡為圓形,達到SVPWM的目的。此外,為避免IPM同一橋臂上下兩只IGBT的直通,程序通過死區控制寄存器對PWMl~6引腳設置死區時間;同時濾除PWM序列中的過窄脈沖,以減小器件的開關損耗。
4 仿真與實驗結果
本文利用Matlab/Simulink工具箱,根據圖1搭建系統模型,對一臺3對極永磁同步電機進行了矢量控制策略的仿真,所得仿真波形如圖5所示。
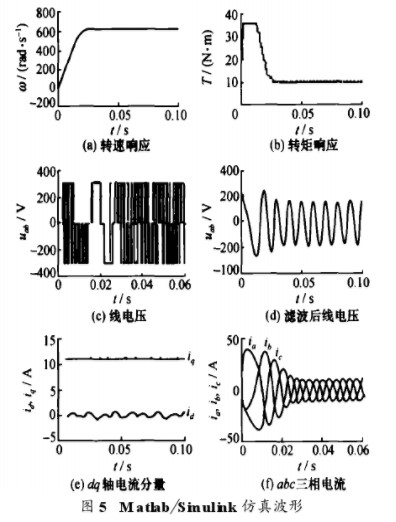
從仿真結果可以看出,本矢量控制系統響應快速,轉矩脈動小,動態性能良好;id能夠較好地跟隨參考值0,從而保證了單位電流下最大轉矩的輸出,有利于推進電機效率的提高。
實際實驗中,TMS320LF2407A時鐘頻率為30 MHz,SVPWM采樣頻率為3 kHz,死區時間設為8 μs,并濾除正負脈寬小于6%脈沖周期的過窄脈沖。當轉速為300 r/min時,可得永磁電機推進系統輸出電壓、電流波形及其頻譜如圖6、圖7所示。
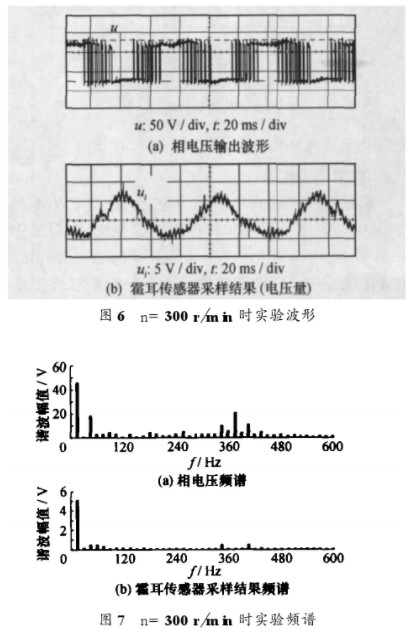
由圖7a可以看出,SVPWM方式生成的電壓基波幅值較大,諧波分布比較分散,但其低次諧波主要為三次諧波;由圖7b可以看出,三相電機的電路結構對三次諧波成分有自然抑制作用,高次諧波則通過電機繞組電感的濾波作用得到削弱和消除,從而大大減小了諧波電流。
5 結 論
仿真和實驗結果表明,采用交-直-交PWM驅動和最大轉矩/電流矢量控制的全數字永磁同步電動機推進系統,電壓利用率較高,轉矩脈動小,能夠較好地抑制了電機電流中的諧波,低速性能優于直接轉矩控制,可以滿足推進電動機低轉速、大轉矩、輕噪聲的要求,為現代艦船電力推進系統數字化操控的實現提供了一定參考。
-
dsp
+關注
關注
552文章
7962瀏覽量
348296 -
PWM
+關注
關注
114文章
5149瀏覽量
213437 -
電機
+關注
關注
142文章
8938瀏覽量
145127
發布評論請先 登錄
相關推薦
永磁同步電動機原理
一文闡述永磁同步電動機的綜合效益
永磁同步電動機的發展趨勢如何?
一文解析永磁同步電動機的原理與結構
無刷直流永磁電動機(BLDCM)與自控式永磁同步電動機(PMSM)有何區別
永磁同步電動機的組成部分
永磁同步電動機如何實現自由停車?
低速永磁同步電動機的設計研究
基于矢量控制的永磁同步電動機回饋制動仿真





 工商網監
工商網監
評論