 直線一級倒立擺的組合式控制系統的設計與仿真
直線一級倒立擺的組合式控制系統的設計與仿真
引言
小車倒立擺控制能有效反映控制中的許多關鍵問題,如鎮定問題、非線性問題、魯棒性問題、隨動問題及跟蹤問題,因此成為學習自動控制理論,研究自動控制算法較為合適的實驗對象之一。同時,它還具有工程應用背景,為理論到實踐的轉化提供了橋梁。因此,對倒立擺系統的研究在理論上和方法論上均具有深遠意義。
本文針對本科自動控制原理課程設計中倒立擺擺桿偏角控制器的在線仿真存在:手扶擺桿起擺不安全,單變量擺桿角度控制器無法同時控制小車的位置,實驗觀測不便等問題,提出并設計了基于固高公司起擺控制、最優小車位置控制、嵌入學生擺桿偏角控制的組合式控制系統。在線仿真實驗表明,組合式控制系統對直線一級倒立擺的控制有效,能滿足本科自動控制原理課程沒計及實驗的安全、自動、直觀、迅捷、可靠的要求。
1 系統建模
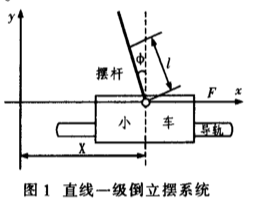
小車直線一級倒立擺系統的控制目標是擺桿偏角最大不超過±5°,小車在軌道中間位置左右偏移不超過±10 cm,以達到一種動態的平衡。

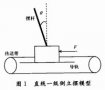
小車直線一級倒立擺實驗系統如圖1所示。對小車和擺桿做受力分析,根據牛頓運動定律,可得小車直線一級倒立擺動力學模型如式(1)所示。
式中:M為小車質量,m為擺桿質量;b為小車摩擦系數;l為擺桿長;I為擺桿轉動慣量;θ為擺桿偏角;x為小車位移;F為小車受力。
由于θ=π+φ,且φ≤1(換算成弧度比較),u代表被控對象的輸入力F,則對式(1)進行線性化處理,可得式(2),如下:
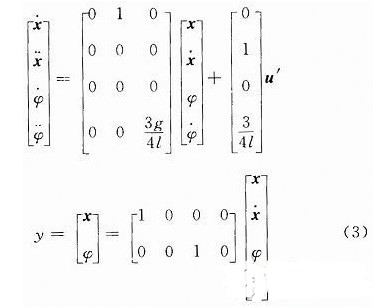
對質量均勻擺桿,取,由線性系統理論得系統的狀態空間如式(3)所示:
2 嵌入式組合控制器的設計
2.1 系統能控性分析
被控系統狀態完全可控性矩陣Uc=[B AB A2BA3B],通過計算可得rank(Uc)=4,即矩陣Uc的秩等于系統狀態變量維數;被控系統輸出完全可控性矩陣Uo=[CB CAB CA2B CA3B D],求得rank(Uo),即矩陣Uo的秩等于系統輸出向量維數。所以系統可控,可以對系統進行控制器設計,使系統穩定。
本文所使用的控制器是由自動起擺控制器Swingup Controller、線性二次調節器LQR Controller和學生設計的控制器Controller1組成的嵌入式組合控制器。在Simulink中搭建直線一級倒立擺嵌入式組合控制系統,如圖2所示。
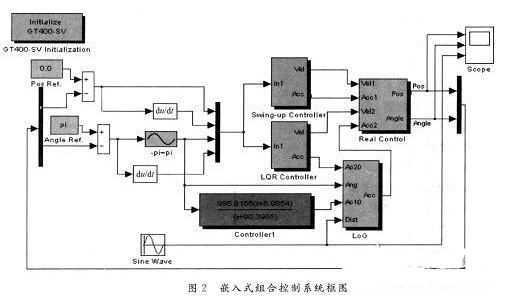
自動起擺控制器Swing-up Controller能夠控制直線一級倒立擺由靜止下垂的穩定平衡狀態自動轉化到豎直向上的不穩定平衡狀態,而無需給擺桿施加力的作用,就可以實現擺桿的自動擺起。
2.2 LQR控制器原理
針對線性系統的狀態方程和輸出方程y(t)=Cx(t)+Du(t),LQR方法通過確定最佳控制量u(t)=-Kx(t)中的矩陣K,使得控制性能指標取極小值。其中,x是狀態向量;u是控制向量;R為正定厄米特或實對稱矩陣;Q為正定或半正定厄米特或實對稱矩陣。參數R和Q分別用來平衡輸入量和狀態量的權重。
2.3 系統的結構
系統主要由被控對象、起擺控制器、LQR控制器、學生控制器、位置給定器、角度給定器、運算器和擾動信號發生器等構成。整個系統是在固高公司提供的直線單級倒立擺控制系統基礎上,設計邏輯切換單元(LOG),把學生控制器嵌入系統中,形成嵌入式組合控制的倒立擺控制系統。
2.4 系統的功能
(1)能夠實現擺桿的自動擺起。
(2)當擺桿偏角進入±20°范圍時,自動切換到LQR控制器,以實現擺角的控制和穩擺;
(3)當擺桿偏角進入±5°范圍時,自動切換到學生控制器穩擺。
在穩擺過程中,始終由LQR控制器控制小車在適宜位置運動。加入干擾信號后,可以同時在線觀測到小車位置、擺桿角度被控過程和干擾信號的波形。整個運行過程無需人工干預,實現了安全、自動、迅捷、可靠的設計目標。多路顯示器Scop可實時顯示小車位置、擺桿角度、干擾信號的動態變化情況。
2.5 LOG模塊內部結構
LOG模塊內部結構如圖3所示。
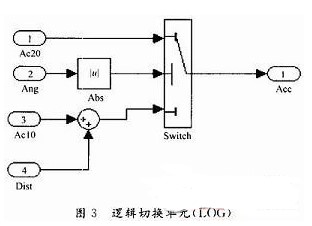
圖3中左端端子分別為:端子1為擺桿偏角進入±20°范圍時的加速度輸入端;端子2為倒立擺擺桿的角度輸入端;端子3為擺桿偏角進入±5°范圍時的加速度輸入端,端子4為干擾信號的輸入端。中間的Abs和Switch框分別為取絕對值模塊和選擇開關模塊。右端Acc為邏輯切換單元輸出,即加速度信號。
2.6 邏輯切換單元原理
當擺桿偏角進入±20°范圍時,自動切換到LQR控制器,以實現擺角的控制和穩擺;當擺桿偏角進入±5°范圍時,自動切換到作者設計的控制器穩擺。
3 仿真實驗
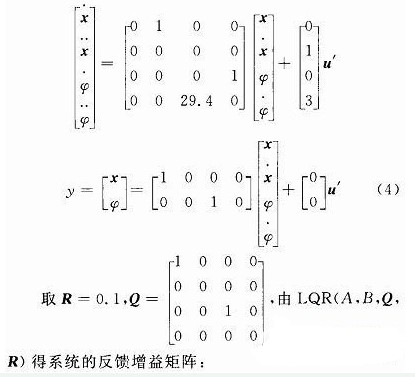
本文所用實際系統的模型參數為:l=0.25 m,g=9.8 m/s2,采樣周期T=0.020s。
將上述參數代入第1節中系統狀態空間方程式(3),可得系統的實際模型(4)如下:
K=[-3.1623 -3.7134 31.1664 5.718 3]在線仿真的實時小車位置(單位:m)、擺桿角度(單位:(°))和干擾變化波形如圖4所示。
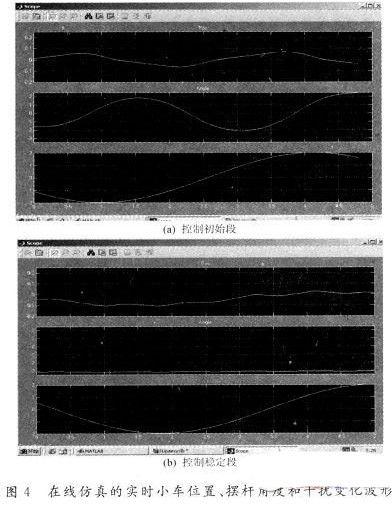
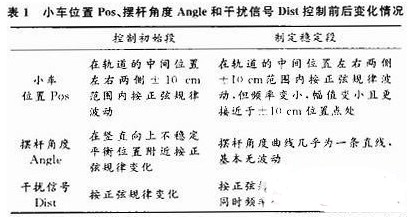
嵌入式組合式控制器控制過程中小車位置Pos、擺桿角度Angle和干擾信號Dist的在線仿真響應波形變化情況分析如表1所示。結果表明本文提出的嵌入式組合式控制算法對直線單級倒立擺系統的控制正確、有效。能夠達到自動和安全的控制效果,滿足系統的設計要求。
4 結論
本文根據線性系統理論、最優控制理論和自動控制原理沒計了組合式控制器,其可行性和有效性在單級直線倒立擺系統上得到了驗證。該控制器具有簡單、直觀和易于實現的特點。只要擺桿的初始角度在±20°范圍內,嵌入式組合控制器都能使倒立擺控制系統保持穩定的倒立平衡狀態。本文建立的實驗平臺也可作為控制系學生的《自動控制原理》課程設汁實驗及考核平臺。
-
控制器
+關注
關注
112文章
16214瀏覽量
177481 -
嵌入式
+關注
關注
5072文章
19026瀏覽量
303523 -
控制系統
+關注
關注
41文章
6550瀏覽量
110498
發布評論請先 登錄
相關推薦
基于研華數據采集卡PCI—1710—B的倒立擺控制系統研究


模糊控制器控制一級倒立擺






 工商網監
工商網監
評論