") 采用ARM處理器及嵌入式WinCE系統(tǒng)實(shí)現(xiàn)船用導(dǎo)航儀的設(shè)計(jì)
采用ARM處理器及嵌入式WinCE系統(tǒng)實(shí)現(xiàn)船用導(dǎo)航儀的設(shè)計(jì)
目前,隨著我國(guó)第十顆北斗衛(wèi)星的成功發(fā)射,北斗區(qū)域衛(wèi)星導(dǎo)航系統(tǒng)已完成基本系統(tǒng)建設(shè)。北斗衛(wèi)星導(dǎo)航系統(tǒng)基本上能滿足測(cè)繪、漁業(yè)、交通運(yùn)輸、氣象、電信、水利等行業(yè),以及大眾用戶的應(yīng)用需求。在加上北斗導(dǎo)航衛(wèi)星定位系統(tǒng)的ICD的公布,那么對(duì)于北斗衛(wèi)星導(dǎo)航儀的研究勢(shì)在必行,而我國(guó)的北斗導(dǎo)航衛(wèi)星定位系統(tǒng)同時(shí)具備定位與通信功能、可同時(shí)解決“我在哪”和“你在哪”等應(yīng)用優(yōu)勢(shì)。但是實(shí)際的應(yīng)用并不理想,主要表現(xiàn)在:1)民用領(lǐng)域應(yīng)用不充分,未形成產(chǎn)業(yè)化的現(xiàn)狀;2)用戶終端設(shè)備價(jià)格偏高,在市場(chǎng)上無(wú)法與GPS系統(tǒng)形成競(jìng)爭(zhēng);3)用戶終端設(shè)備研制開發(fā)滯后,跟不上應(yīng)用需求。北斗導(dǎo)航在民用領(lǐng)域有著廣泛的前景,但影響、制約北斗系統(tǒng)在民用領(lǐng)域獲得廣泛應(yīng)用的主要因素就是系統(tǒng)用戶終端。而現(xiàn)有的導(dǎo)航儀基本上都是基于FPGA、DSP或者是兩者相結(jié)合為硬件平臺(tái)的GPS導(dǎo)航儀,也有比較先進(jìn)GPS采用ARM作為處理器。在這樣的背景下,將ARM處理器運(yùn)用到北斗衛(wèi)星導(dǎo)航系統(tǒng)上,研制一種超強(qiáng)信號(hào)靈敏度、出眾的多路徑抑制能力及抗干擾/防欺騙能力;支持多頻點(diǎn)、多種升級(jí)配置超越主流高端產(chǎn)品;完全自主知識(shí)產(chǎn)權(quán);從基帶芯片到導(dǎo)航解算完全自主研發(fā),技術(shù)支持、產(chǎn)品維護(hù)、軟件升級(jí)、非標(biāo)定制等均有保障;體積小、功耗低、性能可靠的終端接收機(jī)具有重要的意義。
1 系統(tǒng)總體設(shè)計(jì)方案
本系統(tǒng)的硬件平臺(tái)為三星公司的S3C2440A微處理器。S3C2440A的核心處理器(CPU)是一個(gè)由Advanced RISCMacllines有限公司設(shè)計(jì)的16/32為ARM920T的RISC處理器。ARM920T實(shí)現(xiàn)了MMU、AMBA、BUS及Harvard高速緩沖體系結(jié)構(gòu)。這一結(jié)構(gòu)具有獨(dú)立的16KB指令Cache和16KB數(shù)據(jù)Cache。每個(gè)都是由8字節(jié)的行組成。通過提供一整套完整的通用系統(tǒng)外設(shè),S3C2440A減少整體系統(tǒng)成本和無(wú)需配置額外的組件。
北斗導(dǎo)航接收機(jī)主要由射頻前端、A/D轉(zhuǎn)換器、基帶信號(hào)處理和導(dǎo)航解算部分組成。射頻前端接收衛(wèi)星的射頻信號(hào),經(jīng)前置放大器放大后,將信號(hào)下變頻為中頻信號(hào);A/D轉(zhuǎn)換器采樣中頻信號(hào),把模擬信號(hào)量化編碼為數(shù)字信號(hào);基帶數(shù)字信號(hào)處理部分主要功能為;衛(wèi)星信號(hào)的二維捕獲、載波相位和碼相位的跟蹤,并且測(cè)算出偽距;最后導(dǎo)航解算部分采用一定的算法消除模型誤差,求解偽距方程,解析出衛(wèi)星接收機(jī)天線的地理位置,從而實(shí)現(xiàn)衛(wèi)星定位。整體設(shè)計(jì)框圖如圖1所示。
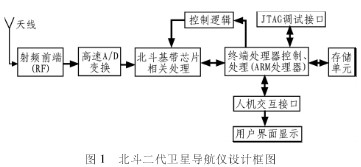
ARM處理器主要是負(fù)責(zé)對(duì)北斗基帶芯片數(shù)據(jù)的響應(yīng)、處理和控制。北斗基帶芯片采用的是HwaNavchip-1芯片,可快速捕獲北斗系統(tǒng)B1和B3頻點(diǎn)的精密測(cè)距碼和北斗/GPS衛(wèi)星的普通測(cè)距碼,具有較快的捕獲速度、極高的動(dòng)態(tài)跟蹤范圍和測(cè)量精度。為降低開發(fā)難度,方便二次開發(fā),系統(tǒng)采用的是“核心板+底板”的設(shè)計(jì)方案,這樣可以在核心板不變動(dòng)的情況下,更改底板的功能組成,以使用不同的功能。同時(shí),由于核心板采用多層PCB板設(shè)計(jì),而底板采用雙層板即可,從而大大的降低了系統(tǒng)的成本。系統(tǒng)硬件設(shè)計(jì)原理框圖如圖2所示。

2 系統(tǒng)硬件電路設(shè)計(jì)
2.1 核心板電路構(gòu)成
核心板采用ARM開發(fā)板最小系統(tǒng)設(shè)計(jì),由S3C2440A處理器作CPU、內(nèi)存SDRAM、閃存FLASH(NOR FLASH和NANDFLASH)、晶振電路、復(fù)位電路和啟動(dòng)配置電路組成。
2.2 北斗基帶芯片處理模塊及電路
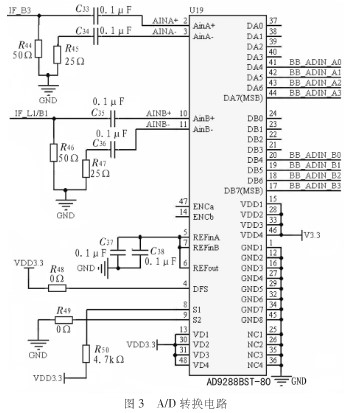
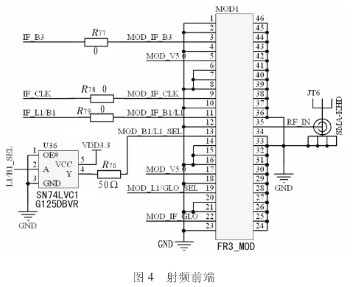
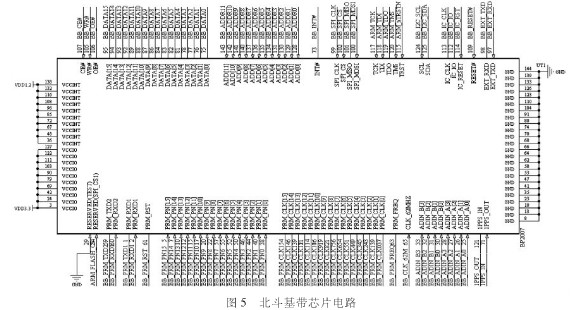
北斗基帶芯片采用的是HwaNavchip-1芯片,可快速捕獲北斗系統(tǒng)B1和B3頻點(diǎn)的精密測(cè)距碼和北斗/GPS衛(wèi)星的普通測(cè)距碼,具有較快的捕獲速度、極高的動(dòng)態(tài)跟蹤范圍和測(cè)量精度,通過串口輸出標(biāo)準(zhǔn)的二進(jìn)制或NMEA-0183格式的信號(hào),數(shù)據(jù)被傳送到解析程序進(jìn)行驗(yàn)證處理,計(jì)算出位置信息,并在液晶顯示器上進(jìn)行顯示。這部分電路的主要工作原理和過程是將射頻信號(hào)經(jīng)過下變頻成為模擬中頻信號(hào)再通過A/D轉(zhuǎn)換得到導(dǎo)航信號(hào),這些信號(hào)經(jīng)過基帶處理模塊和導(dǎo)航信息處理模塊捕獲、跟蹤、解算得到輸出的導(dǎo)航信息。A/D轉(zhuǎn)換和射頻前端電路分別如圖3、4所示,北斗基帶芯片部分電路如圖5所示。
2.3 底板硬件電路
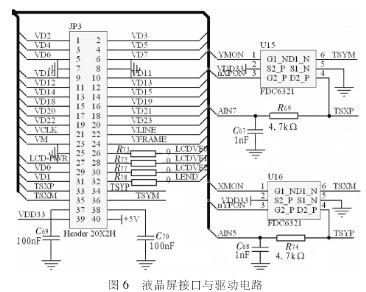
2.3.1 彩色液晶屏接口及觸摸屏驅(qū)動(dòng)電路
S3C2440A內(nèi)置有液晶控制器,可以支持最大256 k色TFT彩色液晶屏、最大4 k色STN彩色液晶屏。彩色屏上帶有觸摸屏(為四線電阻式觸摸屏),用于檢測(cè)屏幕觸摸輸入信號(hào),有利于提高人機(jī)交互的友好性。在使用的時(shí)候,需要一套切換控制及ADC轉(zhuǎn)換電路,用于切換觸摸屏的X、Y軸輸入,并進(jìn)行A/D轉(zhuǎn)換。接口與觸摸屏驅(qū)動(dòng)電路如圖6所示。
2.3.2 網(wǎng)絡(luò)接口電路
S3C2440A本身并沒有網(wǎng)絡(luò)接口,通過擴(kuò)展網(wǎng)絡(luò)接口的模式可以為系統(tǒng)提供以太網(wǎng)接入,是本系統(tǒng)的一個(gè)重要的功能模塊,主要用于電子海圖更新以及相關(guān)數(shù)據(jù)上傳下載。該電路的核心芯片是DM9000E 10/100M以太網(wǎng)控制器,電路使用16位總線方式進(jìn)行控制,數(shù)據(jù)總線DATA0~DATA15與SD0~SD15連接,地址線也進(jìn)行相對(duì)應(yīng)的連接,片選線nGCS3與芯片的AEN相連。模塊電路使用通用的網(wǎng)絡(luò)接口電路即可。
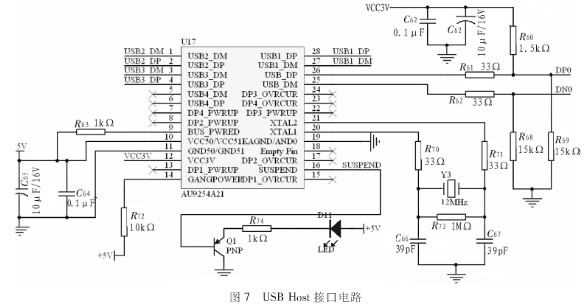
2.3.3 USB接口電路
S3C2440A具2兩個(gè)USB Host控制器和1個(gè)USB Device控制器,本設(shè)計(jì)只使用了DN0、DP0引腳作為唯一的下行口,為此還設(shè)計(jì)了1個(gè)USB集線器電路.通過集線器可以方便對(duì)USB下行口進(jìn)行擴(kuò)展,USB集線器芯片采用的是MICRO公司的AU9254。用于電子海圖、導(dǎo)航定位軟件更新,導(dǎo)航數(shù)據(jù)下載保存等。電路連接如圖7所示。
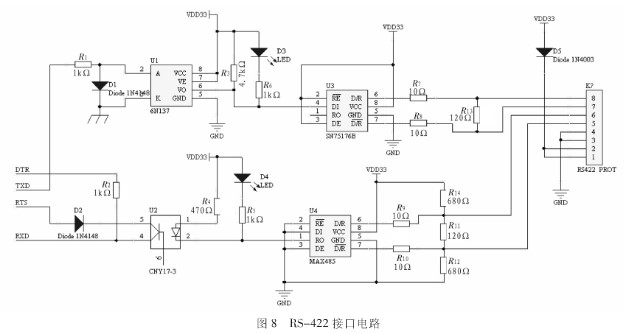
2.3.4 RS-422接口電路
目前船舶駕駛臺(tái)導(dǎo)航設(shè)備均采用RS-422接口進(jìn)行數(shù)據(jù)互聯(lián),由于接收器采用高輸入阻抗和發(fā)送驅(qū)動(dòng)器比RS-232更強(qiáng)的驅(qū)動(dòng)能力,允許在相同傳輸線上連接多個(gè)接收節(jié)點(diǎn),所以RS-422支持點(diǎn)對(duì)多的雙向通信,采用全雙工通信模式,差模傳輸,抗干擾能力強(qiáng),能給ECDIS和雷達(dá)等導(dǎo)航設(shè)備提供實(shí)時(shí)北斗導(dǎo)航定位信息。電路如圖8所示。
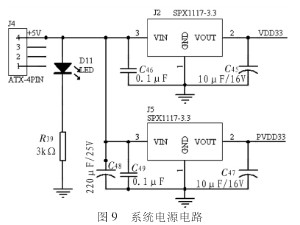
2.3.5 電源電路
本系統(tǒng)使用的電源電路圖9所示,5 V的電源經(jīng)過C46、C48和C49濾波后,由兩片低壓差電源芯片將電源轉(zhuǎn)換為穩(wěn)定的3.3 V電源,分別給主板供電(電路圖中VDD33)和給核心板供電(電路圖中PVDD33)。
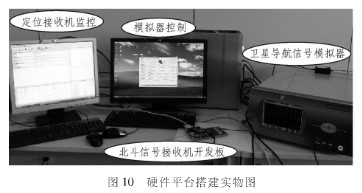
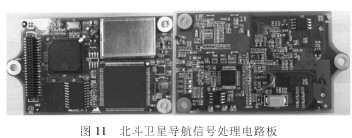
3 硬件調(diào)試環(huán)境搭建及測(cè)試
在提出設(shè)計(jì)方案的基礎(chǔ)上,通過實(shí)驗(yàn)來(lái)初步論證設(shè)計(jì)方案的可行性,本設(shè)計(jì)的系統(tǒng)硬件平臺(tái)搭建結(jié)果實(shí)物圖如圖10所示,北斗衛(wèi)星導(dǎo)航信號(hào)處理部分初步設(shè)計(jì)電路板如圖11所示。
4 結(jié)論
文中主要針對(duì)我國(guó)船用導(dǎo)航儀設(shè)計(jì)、應(yīng)用完全自主方面考慮,采用處理能力強(qiáng)大的ARM處理器以及嵌入式WinCE作為系統(tǒng)的操作系統(tǒng),以計(jì)算機(jī)技術(shù)為基礎(chǔ)、軟硬件可剪裁設(shè)計(jì)。從實(shí)驗(yàn)結(jié)果可以看出,核心板加底板的設(shè)計(jì)方法能實(shí)現(xiàn)我國(guó)北斗船用導(dǎo)航儀功能,本系統(tǒng)使用S3C2440A進(jìn)行嵌入式系統(tǒng)硬件平臺(tái)的搭建,為系統(tǒng)進(jìn)一步開發(fā)做好了準(zhǔn)備。這種設(shè)計(jì)方案也方便二次開發(fā),只要更改底板設(shè)計(jì)即可實(shí)現(xiàn)不同領(lǐng)域的設(shè)計(jì)需求,降低了開發(fā)難度和成本,也縮短了開發(fā)周期。
-
處理器
+關(guān)注
關(guān)注
68文章
19166瀏覽量
229151 -
嵌入式
+關(guān)注
關(guān)注
5068文章
19020瀏覽量
303317 -
微處理器
+關(guān)注
關(guān)注
11文章
2247瀏覽量
82321
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于ADAS嵌入式導(dǎo)航儀電路設(shè)計(jì) —電路圖天天讀(40)

導(dǎo)航儀怎么分類?
嵌入式導(dǎo)航系統(tǒng)DIY分享
基于嵌入式ARM & WinCE 的小型監(jiān)控系統(tǒng)的設(shè)計(jì)
基于北斗二代系統(tǒng)的嵌入式船用導(dǎo)航儀硬件設(shè)計(jì)

基于嵌入式ARM&WinCE的小型監(jiān)控系統(tǒng)的設(shè)計(jì)
ARM嵌入式處理器結(jié)構(gòu)與應(yīng)用基礎(chǔ)
基于ADAS嵌入式導(dǎo)航儀電路設(shè)計(jì)詳解

基于ARM11的嵌入式系統(tǒng)導(dǎo)航儀的設(shè)計(jì)與開發(fā)_王欣欣
北斗二代系統(tǒng)的嵌入式船用導(dǎo)航儀硬件設(shè)計(jì)

基于ARM11和WinCE的溫室大棚嵌入式監(jiān)控系統(tǒng)設(shè)計(jì)

基于北斗二代系統(tǒng)的嵌入式船用導(dǎo)航儀硬件設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論